КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Регулирование координат асинхронного двигателя с помощью резисторов
|
|
|
|
Этот способ регулирования часто называют реостатным. Он заключается во введении добавочных (активных) сопротивлений в статорную или роторную цепь Д. Способ очень прост, но сопровождается значительными потерями и не позволяет получить высокое качество регулирования. Здесь может быть несколько вариантов [9].
Первый вариант: включение добавочного резистора  в цепь статора.
в цепь статора.
 .
.
Этот способ применяется для ограничения токов в переходный период. Обычно он используется для Д с короткозамкнутым ротором. Очевидно, что включение резистора приводит к снижению тока ротора и статора и не влияет на величину скорости идеального хода:
 .
.
Критическое скольжение уменьшается:
 .
.
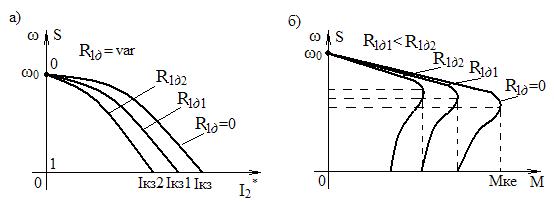
Рис. 5.5. Электромеханические (а) и механические (б) характеристики АД при введении добавочного резистора в цепь статора
Электромеханические характеристики (рис. 5.5, а) выходят из одной точки  . С увеличением сопротивления жесткость характеристик уменьшается, и располагаются они в первом квадранте левее и ниже естественной. Как видно из характеристик, этот способ можно использовать для ограничения тока Д.
. С увеличением сопротивления жесткость характеристик уменьшается, и располагаются они в первом квадранте левее и ниже естественной. Как видно из характеристик, этот способ можно использовать для ограничения тока Д.
Анализ механических характеристик (рис. 5.5, б) показывает, что они также выходят из одной точки и располагаются ниже и левее естественной. С увеличением критический момент уменьшается, уменьшается также и критическое скольжение. Использовать этот метод для регулирования частоты вращения не представляется возможным из-за малого диапазона регулирования и малой перегрузочной способности. Этот способ также отличает низкая экономичность. Применяется данный способ, как правило, лишь для ограничения токов и моментов при пуске, торможении и реверсе.
|
|
|
Примечание: может быть использовано импульсное регулирование координат привода за счет замыкания ключом резисторов, включенных в цепь статора.
Второй вариант: включение добавочного резистора  в цепь ротора.
в цепь ротора.
Этот метод используется только в Д с фазным ротором и состоит во введении добавочного сопротивления  в цепь ротора. В данном случае переменной величиной является = var. При этом электромеханическая характеристика Д останется такой же, как и в предыдущем случае, а механическая будет существенно отличаться. Учитывая то, что критический момент не зависит от сопротивления фазы ротора (Мк=const), а критическое скольжение меняется, отсюда механические характеристики имеют вид, представленный на рис. 5.6.
в цепь ротора. В данном случае переменной величиной является = var. При этом электромеханическая характеристика Д останется такой же, как и в предыдущем случае, а механическая будет существенно отличаться. Учитывая то, что критический момент не зависит от сопротивления фазы ротора (Мк=const), а критическое скольжение меняется, отсюда механические характеристики имеют вид, представленный на рис. 5.6.
По своим возможностям и характеристикам этот способ соответствует способу регулирования частоты вращения ДПТ НВ изменением сопротивления в цепи якоря.
При увеличении характеристики выходят из одной точки и располагаются ниже естественной. Диапазон регулирования  . Плавность зависит от плавности изменения регулировочного резистора . Данный способ неэкономичен. Применяется он при кратковременном регулировании частоты вращения, а также для регулирования тока и момента. В этой схеме возможно добиться увеличения пускового момента, и при этом перегрузочная способность Д не меняется. Этот способ широко используется в крановых Д. Потери в роторе пропорциональны скольжению, поэтому при увеличении увеличиваются и потери.
. Плавность зависит от плавности изменения регулировочного резистора . Данный способ неэкономичен. Применяется он при кратковременном регулировании частоты вращения, а также для регулирования тока и момента. В этой схеме возможно добиться увеличения пускового момента, и при этом перегрузочная способность Д не меняется. Этот способ широко используется в крановых Д. Потери в роторе пропорциональны скольжению, поэтому при увеличении увеличиваются и потери.
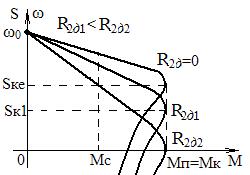
Рис. 5.6. Механические характеристики АД при введении
добавочного сопротивления в цепь ротора
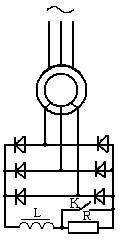
Примечание: возможно импульсное регулирование частоты вращения этим методом (рис. 5.7).
|  | |||
|
 Рис. 5.7. Схема включения (а) и механические характеристики (б) АД при импульсном регулирования координат
Рис. 5.7. Схема включения (а) и механические характеристики (б) АД при импульсном регулирования координат|
|
|
t1 – время замкнутого состояния ключа К;
t2 – время разомкнутого состояния ключа К.
При замыкании ключа К резистор R шунтируется и двигатель работает на естественной характеристике.
|
|
|
|
|
Дата добавления: 2014-11-29; Просмотров: 2289; Нарушение авторских прав?; Мы поможем в написании вашей работы!