КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Таким образом, гироблок непосредственно задает положение осей навигационной системы координат
|
|
|
|
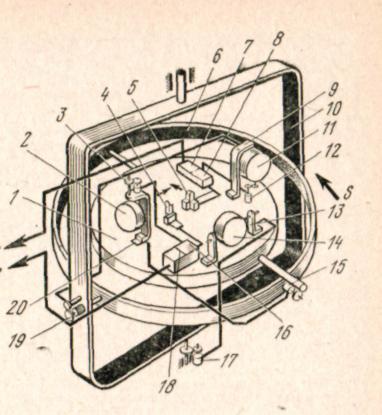
Рис.1. Кинематическая схема гиростабилизированной платформы инерциальной системы:
1-платформа; 2,11,14- гироскопы; 3,12 – коррекционные двигатели; 4,5 – акселерометры; 6 – внутренняя рама карданова подвеса; 7,18 – вторые интеграторы; 8, 16 – первые интеграторы; 9,13,20 – датчики сигналов системы разгрузки; 10 – внешняя рама карданова подвеса; 15,17,19 – двигатели разгрузки (стабилизации).
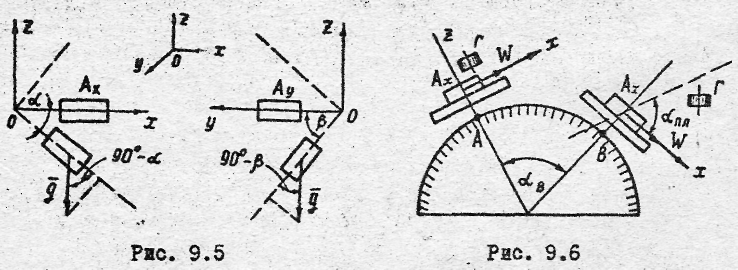
Рис. 2. Установка двух акселерометров на гироплатформе
 Если платформа установлена в горизонте неточно, например развернута на угол α вокруг оси Оу и на угол β вокруг оси Ох, то в измерение составляющих вектора скорости будет вноситься ошибка:
Если платформа установлена в горизонте неточно, например развернута на угол α вокруг оси Оу и на угол β вокруг оси Ох, то в измерение составляющих вектора скорости будет вноситься ошибка:
(1)
По требованиям точности ИНС ошибка в горизонтировании платформы не должна превышать нескольких угловых минут. Реализовать такое требование с помощью системы маятниковой коррекции не представляется возможным.
Поэтому в ИНС для горизонтирования платформы применяется интегральная коррекция, обеспечивающая необходимую точность. Принцип действия интегральной коррекции рассмотрим на примере одноосного гиростабилизатора (рис. 3).
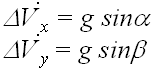
Рис. 3. Принцип интегральной коррекции
Пусть платформа с акселерометром Ах выставлена в начальный момент времени to горизонтально (точнее говоря, нормально вектору ) в точке А. При перемещении платформы над поверхностью Земли в направлении оси Ox из точки А в точку В с абсолютной скоростью Vx(t) вертикаль повернется на угол αв. Чтобы платформа осталась в горизонтальном положении, ее необходимо развернуть на угол αПЛ, такой, чтобы для любого момента времени t выполнялось равенство:
 или
или
 , где, R - радиус Земли.
, где, R - радиус Земли.
Если управлять разворотом платформы за счет прецессии гироскопа, то необходимо обеспечить скорость его прецессии wг(t), равную скорости поворота платформы:
|
|
|
 (3)
(3)
Для скорости прецессии гироскопа справедливо соотношение
wг(t) = Mк(t)/H
где МK(t) - коррекционный момент, прикладываемый к гироскопу для обеспечения его прецессии; H - кинетический момент гироскопа. Для выполнения равенства (3) необходимо, чтобы коррекционный момент был пропорционален скорости перемещения платформы, т.е.
МK(t)=kVx(t)или wг(t) = kVx(t)/H (4)
,где k - постоянная величина, характеризующая коэффициенты усиления системы. Подставляя в условие (3) соотношения (4) и (2), получим условие соотношение:
K/H = 1/R
,которое называется условием невозмущаемости гировертикали.
Вывод: Параметры системы выбираются такими, чтобы они представляли собой невозмущаемую гировертикаль с периодом колебаний Т=84,4 мин.
|
|
|
|
|
Дата добавления: 2015-01-03; Просмотров: 1220; Нарушение авторских прав?; Мы поможем в написании вашей работы!