КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Назначение, конструкция и работа астрономического компаса
|
|
|
|
Астрокомпасами называются приборы для определения истинного или ортодромического курса путем пеленгации небесных светил с учетом вращения Земли и координат местоположения летательного аппарата.
Пеленгация светил позволяет определить направление небесного меридиана и, используя взаимосвязь его положения с координатами точки наблюдения и временем, вычислить искомые навигационные параметры.
С помощью астрокомпасов можно измерять курс в любых районах земного шара с точностью независящей от высоты, скорости, продолжительности или района полёта.
Однако автономность ограничена условиями видимости небесных светил.
По методам измерений астрокомпасы разделяются на горизонтальные и экваториальные в зависимости от выбора навигационной системы координат.
При построении обеих систем координат небо условно представляют в виде сферы произвольного радиуса, центром которой является наблюдатель.
Вертикаль места наблюдения, продолженная до пересечения с небесной сферой, дает точки Z - зенит и Z' - надир, а ось вращения Земли - северный Pn и южный Ps полюсы мира.
В горизонтальной системе координат (рис. 4) положение светила С определяется относительно истинного горизонта и небесного меридиана высотой h и азимутом A соответственно.
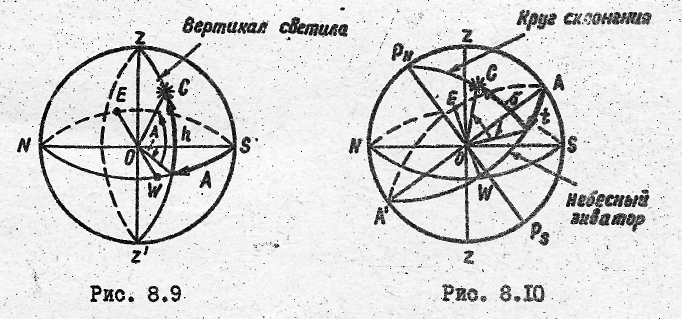
Рис. 4. Горизонтальная система координат
Высотой светила h называют угол, отсчитываемый по дуге вертикала светила от плоскости истинного горизонта до светила.
Азимутом светила называется двугранный угол между плоскостью начального меридиана ZSZ' (нулевого меридиана) и плоскостью вертикала светила ZCZ', измеренный в плоскости истинного (местного) горизонта.
Азимут и высота светила вследствие кажущегося вращения небесной сферы непрерывно изменяются и являются функциями времени.
|
|
|
В экваториальной системе координат (рис. 5) положение светила С определяется относительно небесного экватора и круга склонения светила часовым углом t и склонением δ.
Рис. 5. Экваториальная система координат
Склонением светила называется угол между направлением на светило и плоскостью небесного экватора.
Часовым углом называется угол, отсчитываемый но дуге небесного экватора от точки юга А до точки пересечения круга склонения светила с экватором.
Небесный меридиан образуется путем пересечения сферы плоскостью, проходящей через точки P, P’ и Z.
Истинный меридиан – Р,Р’ и C (плоскость через ось мира и светило).
Принцип устройства астрокомпасов рассмотрим на примере дистанционного астрокомпаса ДАК-ДБ, работающего в горизонтальной системе координат.
Определение курса летательного аппарата в этом компасе производится по формуле
y = А - КУ
где, КУ - курсовой угол светила, определяемый как угол между плоскостью пеленгации и продольной осью самолета в проекции на горизонтальную плоскость,
А – азимут светила.
Курсовой угол измеряется с помощью пеленгаторной системы, а азимут рассчитывается по формуле
где, λ и φ - долгота и широта места измерения соответственно;
tГ - гринвичский часовой угол.
Реализация зависимости осуществляется путем моделирования небесной сферы с помощью пространственного механизма – сферанта, воспроизводящего в пространстве параллактический треугольник: полюс мира P, зенит Z, место светила С.
С этой целью в вычислитель с помощью расположенных на его лицевой стороне азимут-механизмов кремальер и соответствующих шкал вводятся значения долготы и широты мест, местного часового угла и склонения светила.
На рисунке представлена упрощенная кинематическая схема сферанта горизонтального астрокомпаса, помещенного как бы в центре сферы Земли.
|
|
|

Рис.6. Кинематическая схема сферанта
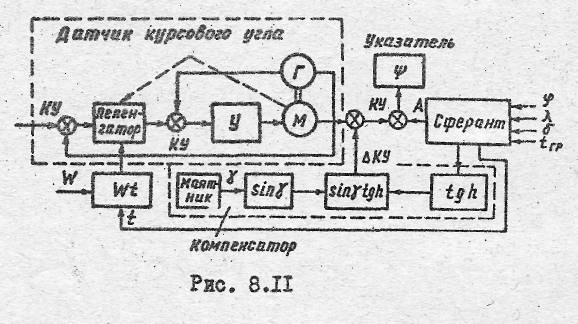
Рис. 7. Структурная схема астрокомпаса
Основными элементами компаса являются: датчик курсового угла светила, вычислитель азимута (сферант) и компенсатор методической погрешности.
Датчик курсового угла включает в себя пеленгатор с фотоэлементами и следящую систему, состоящую из двигатель-генератора и усилителя и обеспечивающую автоматическое удержание пеленгатора в плоскости вертикала светила.
Двигатель управляет поворотом пеленгатора и управляет генератором, вырабатывающим управляющее напряжение для приведения системы слежения в равновесное положение.
Сферант обеспечивает определение азимута светила по азимутальному лимбу при введении в него информации λ, φ, δ и tГР. Ввод информации осуществляется вручную и контролируется по соответствующим шкалам.
Выходные величины сферанта: А – азимут светила, h – высота светила, как функция широты, t – время
Снятие сигнала курса производится с дифференциального сельсина сферанта, обеспечивающего алгебраическое сложение сигналов курсового угла и азимута.
Компенсатор методической погрешности обеспечивает уменьшение погрешности в определении курса, зависящей от крена самолета γ и высоты светила h.
Погрешность определения истинного курса астрокомпаса в момент введения координат не превышает 1±2°.
С изменением координат местоположения самолета погрешность показаний курса возрастает. Поэтому в полете следует периодически вводить текущие значения этих координат.
При полёте по ортодромии пеленгаторная головка может управляться по углу пропорционально пройденному расстоянию Wt (отклоняться назад, время берётся с датчика времени сфератора).
Примером экваториальных астрокомпасов могут служить компасы ДАК-Б и АК-53П, АК-59П.
Экваториальные (моделирующие) астрокомпасы основаны на экваториальной системе небесных координат, т. е. на моделировании небесной сферы с ее кругами и точками. В этих астрокомпасах плоскость пеленгации светила совпадает с плоскостью круга склонения светила. Ось вращения этой плоскости совпадает в пространстве с осью мира.
|
|
|
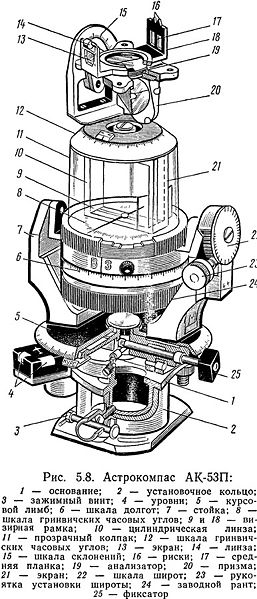
Рис. 8. Астрокомпас АК-53П
1- основание; 2- установочное кольцо; 3- зажимной винт; 4- уровни; 5- курсовой лимб; 6- шкала долгот; 7- стойка; 8- шкала гринвичских часовых углов; 9, 18- визирная рамка; 10- цилиндрическая линза; 11- прозрачный колпак; 12 – шкала часовых углов; 13- экран; 14- линза;15- шкала склонений; 16- риски; 17- средняя планка; 19- анализатор; 20- призма; 21- экран; 22-шкала широт; 23- рукоятка установки широты; 24- заводной рант часов; 25- фиксатор
В экваториальных астрокомпасах принцип определения истинного курса основан на определении направления истинного меридиана в точке измерения курса путем пеленгования светила.
Эти астрокомпасы имеют устройство, состоящее из курсового лимба и круга часовых углов с визирной рамкой. Курсовой лимб и шкалу (круг) часовых углов можно поворачивать относительно основания астрокомпаса, на котором укреплена курсовая черта.
Перед определением курса курсовой лимб устанавливают в плоскости истинного горизонта по уровням, а часовой круг — в плоскости небесного экватора ручкой установки широты на угол 90-j.
Визирную рамку устанавливают на местный часовой угол светила t=tгр-λ.
Вращением курсового лимба добиваются совмещения плоскости пеленгации с направлением на светило.
Прибор на самолёте установлен по оси 0 - 180°(приборный меридиан). При выбранном положении плоскости пеленгации приборный меридиан совпадает с истинным меридианом данного места, курсовая черта указывает по курсовому лимбу угол, под которым направлена продольная ось самолета относительно истинного меридиана, т. е. указывает истинный курс самолета.
Погрешности обоих типов астрокомпасов не превосходят ± 2° для нормальных условий измерений, оговоренных в инструкциях по эксплуатации.
Вывод: астрономические системы навигации (АСН) предназначены для определения координат местоположения самолета позиционным методом. Важным достоинством АСН является высокая точность навигационных измерений, не зависящая от длительности, высоты и скорости полета. Выполнение навигационных измерений возможно в любых географических районах Земли. АСН являются ограниченно автономными системами, поскольку их работа определяется видимостью светил.
|
|
|
Заключение
Основой успешного самолетовождения является комплексное применение технических средств, которое заключается в том, что самолетовождение осуществляется с помощью не одного какого-либо средства, а нескольких. При этом результаты навигационных определений, полученные с помощью одних средств, уточняются с помощью других средств. Такое дублирование исключает возможность допущения грубых ошибок, повышает точность и надежность самолетовождения.
|
|
|
|
|
Дата добавления: 2015-01-03; Просмотров: 2588; Нарушение авторских прав?; Мы поможем в написании вашей работы!