КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Способы регулирования скорости асинхронного двигателя


Почти все станки в качестве электропривода оснащаются асинхронными двигателями. У них простая конструкция и не высокая стоимость. В связи с этим важным оказывается регулирование скорости асинхронного двигателя. Однако в стандартной схеме включения управлять его оборотами можно только с помощью механических передаточных систем (редукторы, шкивы), что не всегда удобно. Электрическое управление оборотами ротора имеет больше преимуществ, хотя оно и усложняет схему подключения асинхронного двигателя.
Для некоторых узлов автоматического оборудования подходит именно электрическое регулирование скорости вращения вала асинхронного электродвигателя. Только так можно добиться плавной и точной настройки рабочих режимов. Существует несколько способов управления частотой вращения путём манипуляций с частотой, напряжением и формой тока. Все они показаны на схеме.
Из представленных на рисунке способов, самыми распространёнными для регулирования скорости вращения ротора являются изменение следующих параметров:
· напряжения подаваемого на статор,
· вспомогательного сопротивления цепи ротора,
· числа пар полюсов,
· частоты рабочего тока.
Последние два способа позволяют изменять скорость вращения без значительного снижения КПД и потери мощности, остальные способы регулировки способствуют снижению КПД пропорционально величине скольжения. Но и у тех и других есть свои преимущества и недостатки. Поскольку чаще всего на производстве применяются асинхронные двигатели с короткозамкнутым ротором, то все дальнейшие обсуждения будут касаться именно этого типа электродвигателей.
 Для частотного регулирования применяют в основном полупроводниковые преобразователи. Их принцип действия основан на особенности работы асинхронного двигателя, где частота вращения магнитного поля статора зависит от частоты напряжения питающей сети. Скорость вращения поля статора определяется по следующей формуле:
Для частотного регулирования применяют в основном полупроводниковые преобразователи. Их принцип действия основан на особенности работы асинхронного двигателя, где частота вращения магнитного поля статора зависит от частоты напряжения питающей сети. Скорость вращения поля статора определяется по следующей формуле:
n1 = 60f/p, где n1 — частота вращения поля (об/мин), f-частота питающей сети (Гц), p-число пар полюсов статора, 60 — коэффициент пересчета мерности.
Для эффективной работы асинхронного электродвигателя без потерь нужно вместе с частотой изменять и подаваемое напряжение. Напряжение должно меняться в зависимости от момента нагрузки. Если нагрузка постоянная, то напряжение изменяется пропорционально частоте.
Современные частотные регуляторы позволяют уменьшать и увеличивать обороты в широком диапазоне. Это обеспечило их широкое применение в оборудовании с управляемой протяжкой, например, в многоконтактных станках сварной сетки. В них скорость вращения асинхронного двигателя, приводящего в движение намоточный вал, регулируется полупроводниковым преобразователем. Такая регулировка позволяет оператору, следящему за правильностью выполнения технологических операций, ступенчато ускоряться или замедляться по мере настройки станка.
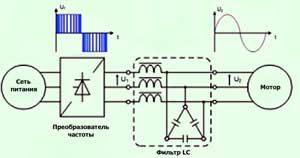
Остановимся на принципе работы преобразователя частоты более подробно. В его основе лежит принцип двойного преобразования. Состоит регулятор из выпрямителя, импульсного инвертора и системы управления. В выпрямителе синусоидальное напряжение преобразуется в постоянное и подаётся на инвертор. В составе силового трёхфазного импульсного инвертора есть шесть транзисторных переключателей. Через эти автоматические ключи постоянное напряжение подаётся на обмотки статора так, что в нужный момент на соответствующие обмотки поступает то прямой, то обратный ток со сдвигом фаз 120°. Таким образом, постоянное напряжение трансформируется в переменное трёхфазное напряжение нужной амплитуды и частоты.
Необходимые параметры задаются через модуль управления. Автоматическая регулировка работы ключей осуществляется по принципу широтно-импульсной модуляции. В качестве силовых переключателей используются мощные IGBT-транзисторы. Они, по сравнению с тиристорами, имеют высокую частоту переключения и выдают почти синусоидальный ток с минимальными искажениями. Не смотря на практичность таких устройств, их стоимость для двигателей средней и высокой мощности остаётся очень высокой.
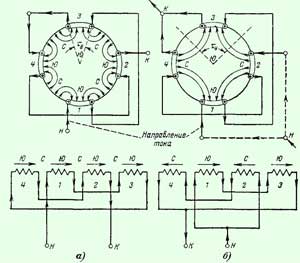 Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
Регулировка скорости вращения асинхронного двигателя методом изменения числа пар полюсов также относится к наиболее распространённым методам управления электродвигателей с короткозамкнутым ротором. Такие моторы называются многоскоростными. Есть два способа осуществления этого метода:
· укладывание сразу нескольких обмоток с разными числами пар полюсов в общие пазы статора,
· применение специальной намотки с возможностью переключения существующих обмоток под нужное число пар полюсов.
В первом случае чтобы уложить в пазы дополнительные обмотки нужно уменьшить сечение провода, а это приводит к уменьшению номинальной мощности электродвигателя. Во втором случае имеет место усложнение коммутационной аппаратуры, особенно для трёх и более скоростей, а также ухудшаются энергетические характеристики. Более подробно этот и другие способы регулирования скорости асинхронного двигателя описаны в архивном файле, который можно скачать внизу страницы.
Обычно многоскоростные двигатели выпускаются на 2, 3 или 4 скорости вращения, причем 2-х скоростные двигатели выпускаются с одной обмоткой на статоре и с переключением числа пар полюсов в отношении 2: 1 = р2: pt, 3-х скоростные двигатели — с двумя обмотками на статоре, из которых одна выполняется с переключением 2: 1 = Рг: Pi, 4-х скоростные двигатели — с двумя обмотками на статоре, каждая из которых выполняется с переключением числа пар полюсов в отношении 2:1. Многоскоростными электродвигателями оснащаются различные станки, грузовые и пассажирских лифты, они используются для приводов вентиляторов, насосов и т.д.
Вопрос 22
| Нагревание и охлаждение электродвигателей |
При работе любого электродвигателя часть поступающей к тему энергии затрачивается на потери, связанные с нагревом обмоток и магнитопроводов, трением в подшипниках и вращающихся частей о воздух. Хотя потери энергии в современных электродвигателях невелики, при их работе все же выделяется значительное количество тепла, что приводит к нагреву электродвигателей. Различают постоянные и переменные потери в электрических машинах. Величина первых не зависит или мало зависит от нагрузки машины. К ним относятся потери на перемагничивание, на вихревые токи, на нагрев параллельных обмоток возбуждения и на трение (о воздух, в подшипниках, на щетках и т. п.). К переменным относят потери, пропорциональные квадрату тока нагрузки. Это потери на нагрев обмотки якоря или статора), последовательных обмоток возбуждения, коллектора и т. п. На холостом ходу нагрев машин определяется постоянными потерями. По мере загрузки машины увеличиваются переменные потери и нагрев ее повышается.
Таким образом, вопросы нагрева электродвигателей имеют большое практическое значение, так как нагревом должна определяться допустимая нагрузка электродвигателя. Температура неработающей машины равна температуре окружающего воздуха. Если машина приведена в рабочее состояние и нагрузка на,нее постоянна, то в каждую единицу времени в ней начинают выделяться определенные порции тепла. В начальный момент работы все выделенное в машине тепло почти полностью идет на ее нагрев, при этом повышается температура машины, т. е. появляется температурный перепад τ между температурой машины и температурой окружающей среды. При появлении температурного перепада машина начинает часть выделяющегося в ней тепла отдавать окружающей среде путем конвекции, лучеиспускания и теплопроводности.
Чем выше перепад τ, тем больше тепла машина будет отдавать окружающей среде. Наконец, перепад достигает такого предельного значения τ пр, когда все выделяемое в машине тепло станет отводиться в окружающую среду и нагрев машины прекратится, т. е. ее температура достигнет значения, предельного для данной нагрузки.
В случае, когда нагрузка на машину превышает допустимую, установившаяся температура может оказаться слишком высокой и превысит допустимую. Установившаяся температура работающей машины не должна превосходить величины, определяемой теплоемкостью ее изоляции.
Современные электроизоляционные материалы, используемые в электрических машинах, делятся на классы: А, В и др. К материалам класса А относятся хлопок, шелк и другие подобные органические материалы, пропитанные специальными лаками или маслами, различные эмали. К материалам класса В относятся материалы из слюды или асбеста, пропитанные органическими связующими составами.
Для всех изоляционных материалов классов А и В ГОСТом установлены допускаемые превышения температуры при температуре охлаждающего воздуха +35°С. Номинальная мощность электродвигателей нормируется для температуры охлаждающего воздуха до 40°С. Если кран или другой механизм предназначается для работы при температуре окружающей среды более 40°С, при выборе электродвигателей нужно учитывать это обстоятельство и вводить соответствующую (поправку, повышающую мощность электродвигателей. В качестве первого приближения можно рекомендовать следующее эмпирическое правило: учитывать повышенную температуру воздуха, увеличивая мощность выбираемого двигателя на 1% при повышении температуры воздуха на 1 ◦С.
Для максимального использования (по тепловым возможностям) всех применяемых в электродвигателе материалов необходимо, чтобы при полной нагрузке его отдельные части нагревались до температур, близких к предельно допустимым. С этой же целью используется искусственное охлаждение электродвигателей, позволяющее большую часть выделяющегося при работе машины тепла отдавать окружающей среде и тем самым повышать нагрузку без опасности разрушения изоляции машины. Большинство электродвигателей, используемых для привода подъемно-транспортных машин, оборудуется самовентиляцией. Лишь электродвигатели, работающие в особо тяжелых условиях, могут иметь независимую вентиляцию. В этом случае воздух через внутренние полости машины продувается независимым вентилятором.
Напрев электрической машины характеризует зависимость вида τ = f (t). Аналитическое определение этой зависимости затруднено тем, что электрическая машина не является однородным телом. Отдельные ее части имеют различные теплоемкости, теплопроводности и теплоотдачу. Они по-разному нагреваются и по-разному отдают тепло окружающей среде. Если для упрощения принять, что электрическая машина является однородным телом, то задача определения зависимости вида τ = f(t) может быть решена следующим образом.
Предварительно примем следующие обозначения:
τ — температурный перепад, град;
q — количество тепла, выделяемого в машине, кал/сек;
с — теплоемкость машины, кал/град;
А — теплоотдача машины, кал/град • сек.
За время dt в машине выделится Q=qdt калорий тепла.

где Q 1 — тепло, затрачиваемое за время dt на нагрев машины;
Q 2 — тепло, отданное окружающей среде за это же время. За время dt температурный перепад машины возрастет на величину dτ. Следовательно,

Подставив эти выражения в уравнение (8), получим дифференциальное уравнение теплового баланса машины

Интеграл этого уравнения, решаемого относительно t,

Примем за начальные условия t = 0 и τ = τ 0 (τ 0 — температурный перепад машины). Тогда

Теперь выражение (12) примет вид

Подставив это выражение в уравнение (11) и произведя преобразования, получим

Полученное уравнение и является аналитически выраженной зависимостью температурного перепада τ от времени t. Положив в этом уравнении t = ̴, получим значение τ пр:

Следовательно, величина предельного или установившегося перепада τ пр, а значит, и установившаяся температура машины зависят лишь от количества тепла, выделяемого в машине за единицу времени, и от ее теплоотдачи.
Величина  входящая в показатель степени в уравнении (15), имеет размеренность времени и называется постоянной времени нагревания. Эта величина от нагрузки машины не зависит и физически является тем временем, в течение которого машина достигла бы перегрева, равного предельному, при отсутствии теплоотдачи в окружающую среду. Значение постоянной времени нагревания зависит от мощности и конструктивных особенностей машины и колеблется в пределах от 1 до 4 ч. Приближенно величину постоянной времени нагревания можно определить по эмпирической формуле:
входящая в показатель степени в уравнении (15), имеет размеренность времени и называется постоянной времени нагревания. Эта величина от нагрузки машины не зависит и физически является тем временем, в течение которого машина достигла бы перегрева, равного предельному, при отсутствии теплоотдачи в окружающую среду. Значение постоянной времени нагревания зависит от мощности и конструктивных особенностей машины и колеблется в пределах от 1 до 4 ч. Приближенно величину постоянной времени нагревания можно определить по эмпирической формуле:

где Θ1, Θ2 и Θ3 — значения температуры машины, измеренные через равные промежутки времени Δt.
Таким образом, уравнение (15) примет вид:

Из этого уравнения вытекает, что теоретически предельный перегрев достигается машиной по истечении бесконечно большого периода времени.
Однако практически можно считать, что машина достигает предельного (установившегося) перегрева по истечении времени, равного (3÷4) Т. Действительно, подставив в уравнение (18) значение t = 3 Т, получим, что τ = 0,95 τ пр, а при t = 4 Т τ = 0,98 τ пр

Кривая, соответствующая уравнению (18), называется экспонентой (рис. 7). Уравнению (18) соответствует кривая 1. Кривой 2 соответствует уравнение

которое можно получить, приняв τ 0=0. Кривые охлаждения электрических машин подобны кривым нагрева. Действительно, если выделение тепла в машине прекратится (q = 0), то уравнения (15) и (18) примут вид:

которому соответствует кривая 3, представляющая собой кривую охлаждения машины от начального перегрева до нуля.
Следует иметь в виду, что значения Т в уравнениях (19) и (20) должны быть одинаковыми, если принять электрическую машину за однородное тело. В действительности же постоянная времени нагревания вращающейся машины меньше постоянной времени охлаждения этой же машины и составляет в среднем 0,25÷0,7 Т охл.
Вопрос 23
|
|
Дата добавления: 2014-12-25; Просмотров: 2051; Нарушение авторских прав?; Мы поможем в написании вашей работы!