КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основні поняття та визначення. Статично невизначувані системи На рис
|
|
|
|
Статично невизначувані системи
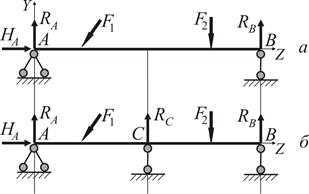
| На рис. 2.13 а наведено шарнірно обперту балку.
Всі три реакції  визначаються з трьох умов рівноваги плоскої системи сил. визначаються з трьох умов рівноваги плоскої системи сил.
|
Рисунок 2.13
Використовуючи метод перерізів, легко знайти внутрішні силові фактори у будь якому перерізі балки.
Додамо ще одну шарнірну-рухому опору в перерізі С (рис. 2.13 б). В наслідок цього система стала більш жорсткою, проте з погляду геометричної незмінюваності цей зв’язок «зайвий». Тепер з трьох рівнянь рівноваги чотири реакції  визначити неможливо. Балка, що зображена на рис. 2.13 б, один раз статично невизначувана, т. я. реакції зв’язків не можуть бути однозначно визначені з рівнянь статичної рівноваги.
визначити неможливо. Балка, що зображена на рис. 2.13 б, один раз статично невизначувана, т. я. реакції зв’язків не можуть бути однозначно визначені з рівнянь статичної рівноваги.
Таким чином, статично невизначуваними називаються системи, силові фактори в елементах яких тільки з рівнянь рівноваги визначити неможна. У таких системах зв’язків більше, ніж необхідно для рівноваги. Отже, деякі зв’язки виявляються в цьому розумінні, так би мовити, зайвими, а зусилля в них – зайвими невідомими. За числом «зайвих» зв’язків або зайвих невідомих зусиль установлюють ступінь статичної невизначуваності системи.
Ступінню статичної невизначуваності системи  називається різниця між числом невідомих зусиль та кількістю незалежних рівнянь статичної рівноваги.
називається різниця між числом невідомих зусиль та кількістю незалежних рівнянь статичної рівноваги.
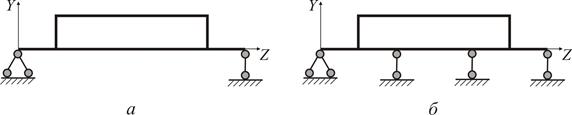
Зв'язки в рамах і стержньових системах ділять на зв'язки зовнішні і зв'язки внутрішні. Під зовнішніми зв'язками розуміються умови, що накладаються на абсолютні переміщення деяких точок системи. В разі плоскої системи в шарнірно-рухомій опорі є один зовнішній зв'язок, в нерухомому шарнірі − два, в жорсткому закріпленні − три. Просторове закріплення відповідає шести зовнішнім зв'язкам. Зовнішні зв'язки часто ділять на необхідні і додаткові. Наприклад, на рис. 2.14 а,б показана плоска рама, що має в першому випадку три зовнішні зв'язки, а у другому п'ять зовнішніх зв'язків.
|
Рисунок 2.14
Для того щоб визначити положення рами в площині як жорсткого цілого, необхідне накладення трьох зв'язків. Отже, в першому випадку рама має необхідні зовнішні зв'язки, а у другому, крім того, два додаткові зовнішні зв'язки.
Під внутрішніми, або взаємними, зв'язками розуміються обмеження, що накладаються на взаємні зміщення елементів рами. Тут також можна говорити як про необхідні, так і про додаткові зв'язки.
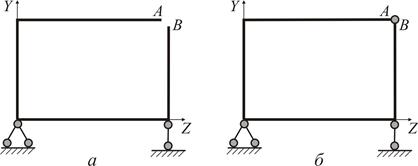 Рисунок 2.15
Рисунок 2.15
| Так, наприклад, плоска рама, що показана на рис. 2.15 а, має необхідну кількість як зовнішніх, так і внутрішніх зв'язків між елементами. Це кінематично-незмінна система. |
Якщо будуть задані зовнішні сили, ми зможемо за допомогою рівнянь статики знайти як реакції опор, так і внутрішні силові фактори в будь-якому поперечному перерізі рами. У тій же рамі, що наведена на рис. 2.15 б, крім зовнішніх накладені два додаткові внутрішні зв'язки, які забороняють взаємне вертикальне і горизонтальне зміщення точок А і В. Система в цьому випадку двічі статично невизначувана (іноді додають: “внутрішнім образом"). У рамі (рис. 2.14 а,б) також є внутрішні додаткові зв'язки. Контур рами повністю замкнутий. Розрізаючи його в будь-якому перерізі (рис. 2.16), ми, не порушуючи кінематичної незмінюваності, отримуємо можливість при заданих силах знайти внутрішні силові фактори в кожному перерізі рами.

| Отже, розрізаючи замкнену раму, ми знімаємо додаткові зв'язки, тобто дозволяємо перетинам А і В повертатися і зміщуватися в двох напрямках один відносно одного. |
Рисунок 2.16
Узагальнюючи, можна сказати, що замкнений плоский контур має три додаткові внутрішні взаємні зв’язки. Таким чином, рама, показана на рис. 2.14 а, тричі статично невизначувана. Рама показана на рис. 2.14 б, п'ять разів статично невизначувана (три рази внутрішнім образом і два рази – зовнішнім).
|
|
|
|
|
Дата добавления: 2014-12-26; Просмотров: 511; Нарушение авторских прав?; Мы поможем в написании вашей работы!