КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Що представляє собою загальна функціональна модель ДЛСК?
|
|
|
|
У чому суть синтезу ДЛСК методом типових вузлів?
Що є вихідними даними для синтезу ДЛСК?
Виконання яких операцій забезпечує ДЛСК?
Які недоліки релейно-контакторних систем керування?
А. Наявність контактів, обмежений строк служби, невисока швидкодія, великі вага і габарити та значне енергоспожи-вання.
Б. Наявність контактів, обмежений строк служби, низька за-вадостійкість, великі вага і габарити та значне енергоспо-живання.
В. Наявність контактів, обмежений строк служби, гальваніч-на розв’язка, великі вага і габарити та значне енергоспо-живання.
Г. Наявність контактів, невисока швидкодія, низька завадос-тійкість, великі вага і габарити та значне енергоспоживан-ня.
А. Автоматизацію руху робочих органів установки в техно-логічних режимах.
Б. Автоматизацію руху окремих органів установки в задаю-чих режимах.
В. Автоматичне регулювання параметрів робочих органів.
Г. Програмне керування рухом окремих робочих органів.
А. Вимоги до якісних показників роботи установки.
Б. Заданий технологічний цикл руху робочих органів.
В. Технічні дані робочих органів.
Г. Якісні показники руху робочих органів.
А. У складанні алгоритму роботи ДЛСК.
Б. У виконанні процедур декомпозиції і композиції.
В. У виконанні процедур композиції і декомпозиції.
Г. У складанні математичного опису ДЛСК.
А. Діаграму технологічного циклу.
Б. Математичну модель.
В. Кінцевий автомат. Електронну схему.
75. Кінцевий автомат (рис.1) має 3 вхідних, 2 внутрішні і 2 вихідні змінні. Скільки можливих наборів матимуть ці змінні?
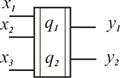
А. 3; 2; 2.
Б. 8; 4; 4. В. 8; 2; 2. Г. 8; 4; 2.
76. Кінцеві автомати в залежності від способу формування логічних функцій поділяють на:
а) однотактні і багатотактні;
б) асинхронні і синхронні; безперервні і дискретні; стійкі і нейтральні.
|
|
|
|
|
Дата добавления: 2015-05-26; Просмотров: 395; Нарушение авторских прав?; Мы поможем в написании вашей работы!