КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Сила, действующая на проводник с током в магнитном поле
|
|
|
|
Эта сила равна  = I(
= I(

 ) или
) или  = /c
= /c  ,
,
где с — электродинамическая постоянная,  — вектор силы тока, протекающего в проводнике, — вектор напряженности магнитного поля, в котором движется проводник, — сила, действующая на проводник длиной
— вектор силы тока, протекающего в проводнике, — вектор напряженности магнитного поля, в котором движется проводник, — сила, действующая на проводник длиной  (направление вектора совпадает с направлением тока), — сила, действующая на проводник единичной длины (рис. 1.17).
(направление вектора совпадает с направлением тока), — сила, действующая на проводник единичной длины (рис. 1.17).
Некоторые характеристики электромагнитных полей. В процессе исследования закономерностей распространения электромагнитных волн в однородной изотропной среде можно с помощью векторного произведения определить такие векторные величины, как скорость  распространения волны: =
распространения волны: =  , где
, где
и - векторы напряженностей соответственно электрического и магнитного полей; вектор плотности потока энергии, переносимой полем (вектор Пойнтинга):  =
=  ( ) = ,
( ) = ,
где с — скорость распространения электромагнитных волн в пустоте (рис. 1.18, б). Формула справедлива в смешанной или гауссовой системе единиц.
Скорость произвольной точки вращающегося тела. Если тело вращается относительно неподвижной точки О (рис. 1.19),то в любой момент времени вектор  угловой скорости вращения совпадает по направлению с мгновенной осью вращения и, проходящей через неподвижную точку О. В этом случае линейную скорость произвольной точки М тела, расположенной вне оси и, можно определить с помощью векторного произведения векторов и
угловой скорости вращения совпадает по направлению с мгновенной осью вращения и, проходящей через неподвижную точку О. В этом случае линейную скорость произвольной точки М тела, расположенной вне оси и, можно определить с помощью векторного произведения векторов и  :
:  =
=  , | |= | | | |sin
, | |= | | | |sin  .
.
 Гироскопические эффекты. Гироскопом называется осесимметричное твердое тело, вращающееся относительно своей единственной неподвижной точки О, расположенной на оси симметрии (рис. 1.20, а). Вращательное движение относительно неподвижной точки можно представить в виде суммы трех независимых друг от друга движений-вращений относительно трех пересекающихся в неподвижной точке осей. Гироскоп, обладающий этими тремя движениями (тремя степенями свободы), называется т р е х с т е п е н н ы м или свобод н ы м. Он обладает замечательным свойством: если момент М
Гироскопические эффекты. Гироскопом называется осесимметричное твердое тело, вращающееся относительно своей единственной неподвижной точки О, расположенной на оси симметрии (рис. 1.20, а). Вращательное движение относительно неподвижной точки можно представить в виде суммы трех независимых друг от друга движений-вращений относительно трех пересекающихся в неподвижной точке осей. Гироскоп, обладающий этими тремя движениями (тремя степенями свободы), называется т р е х с т е п е н н ы м или свобод н ы м. Он обладает замечательным свойством: если момент М  всех внешних сил, действующих на его ротор, относительно неподвижной точки О равен нулю, то гироскоп сохраняет в пространстве положение оси собственного вращения (оси симметрии, или собственной оси).
всех внешних сил, действующих на его ротор, относительно неподвижной точки О равен нулю, то гироскоп сохраняет в пространстве положение оси собственного вращения (оси симметрии, или собственной оси).
|
|
|
Попытка внешними силами возбудить вынужденное движение (прецессию) собственной оси гироскопа ведет к появлению так называемого гироскопического момента, который определяется через векторное произведение угловых скоростей  собственного и
собственного и  вынужденного движений:
вынужденного движений:

 = I
= I  ( ).
( ).
Здесь I — момент инерции ротора гироскопа относительно собственной оси Oz.
Под воздействием момента внешней возмущающей силы ось гироскопа поворачивается, стремясь совпасть с направлением вектора момента внешних сил. При этом точка А приложения силы движется (рис. 1.20, б) не в направлении действия силы, а в направлении вектора момента  (
( ) этой силы относительно неподвижной точки О.
) этой силы относительно неподвижной точки О.
 Если же прецессия гироскопа ограничена или невозможна, то пара сил, соответствующая гироскопическому моменту, обусловливает дополнительные нагрузки на опоры ротора гироскопа
Если же прецессия гироскопа ограничена или невозможна, то пара сил, соответствующая гироскопическому моменту, обусловливает дополнительные нагрузки на опоры ротора гироскопа
N =  =
=  sin
sin 
где — угол между векторами и (рис. 1.21). С этими дополнительными нагрузками нельзя не считаться, так как в ряде случаев они могут преобладать над всеми остальными.
Благодаря своему свойству сохранять положение оси в пространстве гироскоп имеет весьма многочисленные технические применения.
Кроме того, очень важно, что гироскопическим эффектом обладают не только собственно гироскопы, но и все вообще быстро вращающиеся твердые тела, например роторы машин, приборов, аппаратов и других подвижных систем.
|
|
|
Изучение основных проблем, связанных с движением гироскопических систем, является предметом специальной науки — теории гироскопов. Эта наука в качестве математического аппарата широко использует простое и кратное (двойное) векторные произведения. Рассмотрим конкретные примеры.
1. Пусть мотоцикл (или любой другой двухколесный вид транспорта с управляемым передним колесом) входит на криволинейный участок пути (вираж) с заданием крена во внутреннюю сторону виража (рис. 1.22).
Поскольку колеса имеют собственную угловую скорость =  и с появлением крена получают вместе с рамой мотоцикла принудительное вращение с угловой скоростью
и с появлением крена получают вместе с рамой мотоцикла принудительное вращение с угловой скоростью  =
=  (на рис. 1.22 направления и следует принять согласно правилу левого винта), то на них с появлением вращения по крену начинает действовать гироскопический момент = I ( ) = M , где I — момент инерции колеса относительно собственной оси вращения, который обеспечивает поворот рулевой колонки в нужную сторону (в направлении входа в вираж) даже тогда, когда водитель выпустит руль из рук, но будет координировать крен.
(на рис. 1.22 направления и следует принять согласно правилу левого винта), то на них с появлением вращения по крену начинает действовать гироскопический момент = I ( ) = M , где I — момент инерции колеса относительно собственной оси вращения, который обеспечивает поворот рулевой колонки в нужную сторону (в направлении входа в вираж) даже тогда, когда водитель выпустит руль из рук, но будет координировать крен.
В результате входа в вираж появляется центробежная сила, направленная во внешнюю сторону виража и предупреждающая чрезмерное увеличение крена во внутреннюю его сторону.
Таким образом, гироскопический эффект обеспечивает связь движений и способствует нормальному управлению мотоциклом.
Этот эффект обеспечивает принципиальную возможность вождения такого вида транспорта с отпущенным рулем, выполнения ряда цирковых номеров и т. д. при соответствующей координации движений.
Предлагаем читателю самостоятельно рассмотреть характер движения двухколесного вида транспорта с поворотным задним колесом.

 2. Пусть двигатель летательного аппарата (рис. 1.23) вращается с угловой скоростью , а сам аппарат вынужденно движется по некоторой кривой (вираж, спираль, штопор), то есть вращается с = относительно оси Оу. Тогда векторное произведение определяет соответствующее угловое ускорение
2. Пусть двигатель летательного аппарата (рис. 1.23) вращается с угловой скоростью , а сам аппарат вынужденно движется по некоторой кривой (вираж, спираль, штопор), то есть вращается с = относительно оси Оу. Тогда векторное произведение определяет соответствующее угловое ускорение  = . В результате появляется гироскопический момент
= . В результате появляется гироскопический момент
=  = - I = I
= - I = I  = I ( ). Угловая скорость достаточно велика. Поэтому и гироскопический момент также значителен. Физическое воздействие этого момента таково, что он способствует, в зависимости от направления , либо вводу в пикирование, либо выводу из него. Это, в свою очередь, приводит к тому, что из одного штопора (с переходом в пикирование) самолет выводится лучше, а из другого — хуже.
= I ( ). Угловая скорость достаточно велика. Поэтому и гироскопический момент также значителен. Физическое воздействие этого момента таково, что он способствует, в зависимости от направления , либо вводу в пикирование, либо выводу из него. Это, в свою очередь, приводит к тому, что из одного штопора (с переходом в пикирование) самолет выводится лучше, а из другого — хуже.
|
|
|
3. Пусть ротор турбины, установленной на плавательном аппарате, вращается с угловой скоростью (рис. 1.24). При развороте этого аппарата с угловой скоростью возникает гироскопический момент = = - I = I = I ( ). В результате его действия появляются силы дополнительного давления на опоры N =  , при этом
, при этом  =
=  .
.
Если корпус аппарата сравнительно легок, а гироскопическая пара сил достаточно велика, то эти силы, передаваясь на корпус, обусловливают крен во внутреннюю сторону циркуляции.
Изменение направления с этой точки зрения нежелательно, потому что тогда возникает дополнительный крен во внешнюю сторону циркуляции.
4.4. Двойное векторное произведение. Решение многих задач динамики тела с одной неподвижной точкой и задач гироскопии связано с последовательным вычислением нескольких векторных произведений. Такой процесс решения приводит к понятию кратных векторных произведений, например, двойного векторного произведения.
 Задачи, приводящие к двойному векторному произведению. Вычисление кинетического момента тела. При определении момента количества движения (кинетического момента) тела с одной неподвижной точкой (рис. 1.25) имеем количество движения некоторой материальной точки М
Задачи, приводящие к двойному векторному произведению. Вычисление кинетического момента тела. При определении момента количества движения (кинетического момента) тела с одной неподвижной точкой (рис. 1.25) имеем количество движения некоторой материальной точки М  (дискретной массы m сосредоточенной в точке М ): m
(дискретной массы m сосредоточенной в точке М ): m  . Момент количества движения этой массы:
. Момент количества движения этой массы:  =
=  (m ). Здесь скорость движения точки М, равна = . Следовательно, = m ( ) определяется через двойное векторное произведение ( ), а момент количества движения системы n материальных точек
(m ). Здесь скорость движения точки М, равна = . Следовательно, = m ( ) определяется через двойное векторное произведение ( ), а момент количества движения системы n материальных точек
=  =
=  .
.
Вычисление гироскопического момента двухстепенного гироскопа. Двухстепенный гироскоп применяют в качестве пассивного или активного стабилизатора положения основания, на котором он установлен. Это свойство использовано в проектах монорельсовой железной дороги (пассивный стабилизатор), успокоителя качки судов (пассивный или активный стабилизатор) и т. п.
|
|
|
Так, при появлении крена платформы и связанного с ним вынужденного движения (прецессии) ротора пассивного стабилизатора (рис. 1.26) с частотой  = возникает угловое ускорение =
= возникает угловое ускорение =  = . Согласно приближенной теории гироскопа, ему соответствует гироскопический момент = = -I , который, в свою очередь, возбуждает вторичное движение с некоторой угловой скоростью = , связанной с , линейной зависимостью = —
= . Согласно приближенной теории гироскопа, ему соответствует гироскопический момент = = -I , который, в свою очередь, возбуждает вторичное движение с некоторой угловой скоростью = , связанной с , линейной зависимостью = —  (скалярный множитель =
(скалярный множитель =  t измеряется в единицах времени).
t измеряется в единицах времени).
Тогда взаимодействие движений с угловыми скоростями = и = приводит к появлению углового ускорения
 =
=  = = — ( ) = ( ), которому соответствует момент сил инерции (гироскопический), обусловленный возбужденным вторичным движением, вычисляемый так же, как и ускорение , с помощью двойного векторного произведения
= = — ( ) = ( ), которому соответствует момент сил инерции (гироскопический), обусловленный возбужденным вторичным движением, вычисляемый так же, как и ускорение , с помощью двойного векторного произведения
 = = — I = — I ( ).
= = — I = — I ( ).
Физическое направление действия этого момента таково, что он стабилизирует положение внешней рамки подвеса, а следовательно, и основания, на котором закреплена рамка. Этот эффект можно получить всегда, кроме того случая, когда оси собственного вращения и прецессии параллельны. При этом = = 0 и потому гироскопические моменты не возникают.
Схема активной стабилизации отличается от рассмотренной выше схемы пассивной стабилизации тем, что прецессия может возбуждаться специальным управляющим устройством таким образом, чтобы гироскопический момент находился в противофазе с угловой скоростью платформы и полностью компенсировал внешние возмущения.
Наконец, возможна такая схема гиростабилизации, где гироскоп является только датчиком сигнала рассогласования, а удержание платформы в исходном ориентированном состоянии осуществляется специальными двигателями за счет внешних источников энергии.
Стабилизаторы активного и пассивного типа широко применяются в системах автоматического управления, в военной, космической и других видах современной техники.
1. В игpe по перетягиванию каната участвуют 4 человека. Двое из них тянут в одну сторону с силами 330 Н и 380 Н, а два - в другую с силами 300 Н и 400 Н. В каком направлении будет двигаться канат и как велика сила, двигающая его?
2. Сила тяги тепловоза 120 000 Н, а сила сопротивления 110 кН. Определите равнодействующую силу.
3. Может ли числовое значение равнодействующей силы быть меньше числовых значений составляющих сил? Ответ поясните примерами.
4. На тело действуют 4 силы: 15 Н, 77 Н, 89 Н, 120 Н. Найдите их равнодействующую, если известно, что первые две силы направлены в одну сторону, а остальные по той же прямой в противоположную сторону.
5. Пять сил: 600 Н, 250 Н, 750 Н, 100 Н и 300 Н действуют на точку тела по одной прямой. Может ли величина равнодействующей быть равной 1,2 кН, 100H, нулю? Что для этого необходимо?
6. Подъемный кран движется v  скоростью и поднимает груз cо скоростью v . Какую фигуру представляет траектория груза?
скоростью и поднимает груз cо скоростью v . Какую фигуру представляет траектория груза?
7. Тело движется со скоростью 10 м/с под углом 30  к горизонтали. С какой скоростью тело поднимается вертикально вверх к с какой скоростью движется тень тела по земле, если солнце находится в зените?
к горизонтали. С какой скоростью тело поднимается вертикально вверх к с какой скоростью движется тень тела по земле, если солнце находится в зените?
8. Тело весом 30 Н находятся на наклонной плоскости. Найти какая сила скатывает его с наклонной плоскости и с какой силой нормально давит это тело на нее, если угол наклона плоскости 60.
9. Из точки, данной на берегу реки, отправляется к противоположному берегу катер со скоростью 40 км/ч. Скорость течения реки 5 км/ч. В каком направлении следует плыть катеру, чтобы приплыть в ближайшую точку противоположного берега река? Задачу решить графически.
10. Паpaшютист спускается к земле со скоростью 2 м/с. Скорость ветра равна 3 м/с. С какой скоростью движется парашютист?
11. Почему в безветренную дождливую погоду мы наклоняем зонтик вперед?
12. Почему в безветренную дождливую погоду капли дождя на окне движущегося поезда оставляют не вертикальные следы?
13. Вычислите работу, произведенную силой F=(5; 2; 1), если точка ее приложения перемещается прямолинейно из начала координат в точку А(2; 1; 4).
14. Вычислите, какую работу производит сила F=(3; 2; 4). если точка ее приложения перемещается прямолинейно из положения А(2; —5; 4) в положение В(7; —1; 3).
 15. При проектировании механизма его звенья обозначают векторами. Их сумма определяет условие замкнутости механизма. Записать условие замкнутости для схемы четырехзначного механизма, изображенного на рис. 2.
15. При проектировании механизма его звенья обозначают векторами. Их сумма определяет условие замкнутости механизма. Записать условие замкнутости для схемы четырехзначного механизма, изображенного на рис. 2.
16. Определить опорные реакции в шарнирах стержневой системы А ВС (рис. 3), один из стержней которой нагружен посредине силой Р = 2 т, причем АС = С В,  = 30°. Весом стержня пренебрегаем.
= 30°. Весом стержня пренебрегаем.
17. На рис. 4 изображена решетчатая ферма, служащая для перекрытия заводских зданий. Во избежание вредных напряжений, которые могут возникнуть в ферме при колебаниях температуры, одна из опор делается
свободной (на катках). Пусть давление ветра на левый скат фермы выражается при выбранном масштабе вектором  , направленным к горизонту. Определить реакции опор, испытываемые фермой под давлением ветра.
, направленным к горизонту. Определить реакции опор, испытываемые фермой под давлением ветра.
 18. Тело весом g кг перемещается вверх по наклонной плоскости образующей с горизонтальной плоскостью угол. Найти силу Р, которая действует под углом к наклоняй плоски и может сдвинуть тело с места, учитывая трение.
18. Тело весом g кг перемещается вверх по наклонной плоскости образующей с горизонтальной плоскостью угол. Найти силу Р, которая действует под углом к наклоняй плоски и может сдвинуть тело с места, учитывая трение.
19. Точка О подвергается растяжению по трем взаимно перпендикулярным направлениям. Приняв эту точку за начало координат, а упомянутые направления за направления координатных осей обозначив соответствующие осям напряжения через  . Пусть перпендикуляр к произвольной плоскости, проходящей через точку О, составляет с осями координат углы
. Пусть перпендикуляр к произвольной плоскости, проходящей через точку О, составляет с осями координат углы  . Определить полное напряжение Р, действующее в точке О на эту плоскость.
. Определить полное напряжение Р, действующее в точке О на эту плоскость.
20. Сила тяги вертолета образует с направлением ветра угол в 40°. Отношение скорости движения вертолета к скорости ветра равно 6. Найти угол между направлением движения вертолета и направлением ветра.
21. Однородный стержень массой 3 кг прикреплен своим нижним концом к шарниру. К другому его концу подвешен груз массой 2 кг. Стержень удерживается в равновесии горизонтальной оттяжкой, прикрепленной к неподвижной вертикальной стойке. Вычислить силу натяжения оттяжки, если длина вертикальной стойки 1,4 м, а длина горизонтальной оттяжки 0,5 м.
22. Для всякой точки М твердого тела скорость  определяется формулой Эйлера =
определяется формулой Эйлера =  , где — угловая скорость вращения, а г — расстояние от точки М до точки О оси вращения, в которой приложен скользящий вектор . Найти линейную скорость вращения точек волчка, лежащих на окружности большого диаметра, равного 20, если = {—3, 2, 4} и вектор приложен в центре большой окружности.
, где — угловая скорость вращения, а г — расстояние от точки М до точки О оси вращения, в которой приложен скользящий вектор . Найти линейную скорость вращения точек волчка, лежащих на окружности большого диаметра, равного 20, если = {—3, 2, 4} и вектор приложен в центре большой окружности.
Ответы к задачам 15-22.
15. Векторное уравнение замкнутости:  . Проектируя на оси координат, получим систему уравнений в проекциях:
. Проектируя на оси координат, получим систему уравнений в проекциях:

16. На стержень ВС действуют две силы, равные по величине и, противоположные по направлению. Сила 
 , с которой стержень ВС действует на точку С стержня АС, направлена вдоль ВС. Силы и
, с которой стержень ВС действует на точку С стержня АС, направлена вдоль ВС. Силы и  пересекутся в точке D. По теореме о трех непараллельных силах через эту точку пройдет и направление реакции
пересекутся в точке D. По теореме о трех непараллельных силах через эту точку пройдет и направление реакции  в точке А. Из силового треугольника А
в точке А. Из силового треугольника А  СВ, по теореме синусов,
СВ, по теореме синусов,
 .
.
Из равнобедренного треугольника CDE: DC =  AC.
AC.
Из треугольника ACD:

 .
.
При  = 30°, ctg ф = 0, ф = 90° получим:
= 30°, ctg ф = 0, ф = 90° получим:

N = 2 cos 30° = 1,73 т, N = т.
17. Разложим силу  на две составляющие: — перпендикулярную к кровле, и
на две составляющие: — перпендикулярную к кровле, и  — параллельную ей. Вторая составляющая на ферму действия не окажет, ибо ветер будет скользить по кровле. Реакция левой подвижной опоры будет направлена перпендикулярно опорной плоскости, так как ничто не мешает ей перемещаться влево и вправо. Продолжив направление силы до пересечения с направлением реакции левой опоры в точке С, соединим эту точку с центром правой опоры В. Получим направление второй реакции. Разложим вектор
— параллельную ей. Вторая составляющая на ферму действия не окажет, ибо ветер будет скользить по кровле. Реакция левой подвижной опоры будет направлена перпендикулярно опорной плоскости, так как ничто не мешает ей перемещаться влево и вправо. Продолжив направление силы до пересечения с направлением реакции левой опоры в точке С, соединим эту точку с центром правой опоры В. Получим направление второй реакции. Разложим вектор  = на составляющие
= на составляющие  Т'треугольника ФСВ-42
Т'треугольника ФСВ-42
и  . Реакции будут равны этим составляющим и направлены противоположно им.
. Реакции будут равны этим составляющим и направлены противоположно им.
18. Р =  ,
,
где  (угол трения) — угол между направлением равнодействующей реакции опоры и нормалью к поверхности; tg =
(угол трения) — угол между направлением равнодействующей реакции опоры и нормалью к поверхности; tg =  . — коэффициент трения.
. — коэффициент трения.
19. Для определения составляющей усилия вдоль оси ОХ выделим на плоскости площадку F и построим цилиндр с основанием F и oбpaзующей, параллельной оси ОХ. Тогда проекция на плоскость, перпендикулярную оси ОХ, будет равна Fcos , усилие  Fcos , а напряжение Р
Fcos , а напряжение Р  = cos . Аналогично Р
= cos . Аналогично Р  =
=  cos
cos  и Р
и Р  =
=  cos
cos  . Полное напряжение Р =
. Полное напряжение Р = 
20. 34°.
21.  , F = 12,25Н
, F = 12,25Н
22.  = R (cos •
= R (cos •  + cos •
+ cos •  + cosy •
+ cosy •  ).
).
= =10 ((2cos -4 cos )• + (3cos +4 cos )• - (3cos +2 cos )• ).
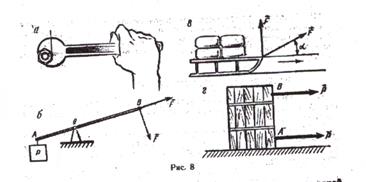 23. В каких явлениях, изображенных на рисунке 8, результат действия силы зависит от положения точки приложения? от направления действия силы?
23. В каких явлениях, изображенных на рисунке 8, результат действия силы зависит от положения точки приложения? от направления действия силы?
|
|
|
|
|
Дата добавления: 2015-06-04; Просмотров: 1036; Нарушение авторских прав?; Мы поможем в написании вашей работы!