КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Контактные и бесконтактные электрические выключатели
Датчики. Классификация и основные показатели датчиков
Классификация систем автоматики
Особенности автоматизации и роботизации КШП
- выбор захватных органов определяется видом заготовки,
- стандартизация и унификация деталей, типизация технологических процессов (разбивка на группы при горячей штамповке, применение осадки+оконч. ручья и т.д.);
- высокие требования к технологичности детали (максимальное качество при минимальном кол-ве операций и затрат на изготовление);
- при автоматизации и роботизации основных операций - изменение размеров заготовки после пластической деформации;
- при автоматизации холодноштамповочных работ - высокие требования к поверхности заготовки (наличие заусенцев, слипание заготовок, намагничивание, присутствие смазки, шероховатость, плоскостность, дефекты поверхности) (материал захватов должны быть менее твердыми, чем материал заготовки);
- при автоматизации горячештамповочных работ - высокие требования к захватам по термостойкости, теплоизоляция, герметизация, виброизоляция (особенно роботов), выполнение требований пожарной безопасности.
1. По назначению системы автоматики подразделяются на:
- системы автоматического управления (САУ);
- системы автоматического контроля (САК);
- системы автоматического регулирования (САР).
Системы автоматического управления (САУ) производят смену технологических операций или их составных частей, изменение режимов работы технологического оборудования, хода технологического процесса в определенном порядке. Простейшие САУ работают по заранее установленному плану - программе без контроля параметров технологического процесса, режимов работы оборудования, т.е. по безрефлексной разомкнутой схеме. При автоматическом управлении исполнительными механизмами управляющие воздействия вводятся в заранее заданные моменты времени или при заранее выбранных условиях без контроля выходных величин объекта, независимо от их значения, т.е. автомат обеспечивает своевременное начало, необходимую последовательность и прекращение отдельных операций технологического процесса иди цикла работы машины.

Работа системы автоматического управления заключается в том, что входной сигнал с блока ввода и считывания программы подается в управляющее устройство (УУ), которое вырабатывает сигнал, необходимый для работы исполнительного механизма (ИМ). Последний воздействует на регулирующий орган РО, изменяя нужный параметр в объекте (О) для поддержания нормального хода технологического процесса. Автоматическому управлению поддаются процессы, которые заранее определены (запрограммированы). Например, программа включения уличного освещения, управление температурой печи в зависимости от заданной температуры под ковку заготовок.
САУ могут входить в САР.
Системы автоматического контроля предназначены для автоматического контроля за состоянием тех. процесса, режимом работы оборудования, машин, механизмов.
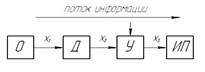
Контроль параметра в объекте (0) производится при помощи датчика (Д) и измерительного прибора (ИП). Датчик преобразует измеряемый параметр в сигнал, удобный для передачи на расстояние, который усиливается усилителем (У). Преобразованный и усиленный сигнал поступает в измерительный прибор (ИП), который показывает значение контролируемого параметра, т.е. обработка первичного сигнала от датчика осуществляется без участия человека (автоматически).
Система автоматического регулирования качественно изменяет ход технологического процесса или работу механизма по определенному закону или поддерживает постоянным определенный параметр процесса. Схема автоматического регулирования является рефлексной замкнутой в отличие от схем автоматического контроля и управления.
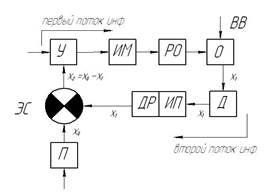
Регулируемый сигнал  , поступающий от датчика (Д), регистрируется измерительным прибором (ИП) и через датчик регулятора ДР поступает в элемент сравнения ЭС. Здесь он сравнивается с сигналом
, поступающий от датчика (Д), регистрируется измерительным прибором (ИП) и через датчик регулятора ДР поступает в элемент сравнения ЭС. Здесь он сравнивается с сигналом  , поступающим из программного блока. При равенстве этих сигналов на все последующие элементы схемы сигнал не подается и регулирующий орган не изменяет своего положения.
, поступающим из программного блока. При равенстве этих сигналов на все последующие элементы схемы сигнал не подается и регулирующий орган не изменяет своего положения.
При отклонении сигнала от датчика задаваемого в ту или иную сторону на выходе элемента сравнения возникает возмущающее воздействие  . Этот сигнал рассогласования поступает на вход усилителя (У). Сигнал
. Этот сигнал рассогласования поступает на вход усилителя (У). Сигнал  , усиленный в регуляторе, приводит в действие исполнительный механизм ИМ, который изменяет положение рабочего органа (РО). Последний воздействует на объект регулирования до тех пор, пока сигнал рассогласования не устранится.
, усиленный в регуляторе, приводит в действие исполнительный механизм ИМ, который изменяет положение рабочего органа (РО). Последний воздействует на объект регулирования до тех пор, пока сигнал рассогласования не устранится.
Систему автоматического регулирования можно представить в виде совокупности САК и САУ.
2. По принципу действия - рефлексные и безрефлексные
Безрефлексные – простейшие системы. Они выполняют последовательную смену операций без выбора возможных вариантов и без проверки исполнения. Они не реагируют на среду, в которой протекает процесс. Они перерабатывают один поток информации. Важнейшими их представителями являются машины-автоматы, автоматические линии и т.п. Рефлексные (зависимые) системы автоматики воздействуют на процесс в зависимости от значения или изменения заранее выбранной физической величины (параметра), определяющей протекание процесса. Для функционирования рефлексной системы необходимо не менее двух потоков информации.
3. По цепи передачи сигналов -замкнутые или разомкнутые.
При разомкнутой цепи воздействия управляющая система реагирует на входные и возмущающие воздействия без получения информации о значениях регулируемых параметров и, следовательно, без сопоставления результатов своей работы с заданием и без возможности ее корректировки (системы автоматических турникетов, система обеспечения заданного теплового режима в помещении в зависимости от температуры наружного воздуха и.т.).
При замкнутой цепи воздействия управляющая система получает информацию о значениях регулируемых параметров, сопоставляет эти значения с требуемыми и корректирует на этой основе свою работу. Это замыкание цепи воздействия осуществляется при помощи обратной связи от управляемой системы к управляющей.
Рефлексная замкнутая.
4. По числу обратных связей - одноконтурные, многоконтурные
5. По характеру математического описания статических динамических режимов подразделяются на линейные и нелинейные. Линейные описываются в статике линейными алгебраическими уравнениями, а в динамике - линейными дифференциальными уравнениями.
6. По характеру управляющего воздействия - системы автоматической стабилизации, системы программного управления, следящие системы.
7. По характеру связи между входной и выходной величинами -непрерывные и прерывистые(дискретные, импульсные и релейные). В непрерывных СА между выходными и входными величинами существует непрерывная функциональная зависимость. В прерывистых непрерывному изменению регулируемого параметра соответствует выходная величина в виде:
- последовательности импульсов, амплитуды, длите6льности и частоты повторений, которые зависят от значения входной величины
- скачкообразного сигнала, который появляется лишь при определенных значениях входной величины (реле)
8. В зависимости от источника энергии:
- электрические
- пневматические
- гидравлические и т.д
Помимо перечисленных возможны и другие признаки классификации.
Датчиком называется первичный элемент автоматики, преобразующий контролируемый или регулируемый параметр в величину более удобную для передачи и ввода последующим элементам устройств. Большинство датчиков преобразует неэлектрические величины измеряемых параметров в электрические. Данное преобразование может быть осуществлено путем непосредственного воздействия параметра процесса на датчик, так и путем воздействия на чувствительный элемент, связанный с датчиком (косвенное воздействие).
Основными показателями, характеризующими датчик, являются:
1. Вид функциональней зависимости изменения выходной величины параметра - Y от изменения входной величины - X при установившемся режиме, т.е. статическая характеристика.
2. Чувствительность датчика S – отношение приращения выходной величины датчика ∆Y к приращению его входной величины ∆X, т.е. крутизна наклона статической характеристики
 ,
,
3. Порог чувствительности - это наименьшее приращение входного параметра датчика, способного вызвать изменение его выходного параметра.
4. Рабочий диапазон - диапазон, в пределах которого погрешности измерения не превышают допустимой величины.
5. Погрешность преобразования - характеризуется абсолютной величиной отклонения между полученными значениями измеряемой величины и ее номинальным значением.
6. Гистерезис измерения - это неоднозначность хода статической характеристики датчика при последовательном увеличении и уменьшении входной величины.
 ,
,
где ∆X=Хmin- XH,XH - номинальное значение входного параметра.
7. Рабочий диапазон - диапазон изменения входных величин, при котором погрешность преобразования не превышает допустимых значений.
8. Инерционность датчика – время запаздывания при передаче сигнала в переходном режиме.
Классификация датчиков
1) По характеру воздействия различают датчики прямого и косвенного воздействия. Прямого - контролируемый параметр непосредственно воздействует на датчик, косвенного - контролируемый параметр воздействует на чувствительный элемент, который в свою очередь, действует на датчик.
2) По способности генерировать сигнал подразделяются на параметрические и генераторные.
Параметрические используются при преобразовании неэлектрических величин параметра в электрические, для измерения их требуется источник питания.
Генераторные - неэлектрическая величина измеряемого параметра преобразуется в электрическую без источника питания
3) По наличию механического контакта с объектом - контактные и бесконтактные.
4) По роду энергии: механические, электрические, гидравлически, пневматические, комбинированные
5) По виду выходного сигнала датчики подразделяются на двухпозиционные и пропорциональные. Двухпозиционные - это датчики логического состояния (да-нет, вкл-выкл). Это путевые переключатели, датчики наличия детали, датчики блокировки. У пропорциональных датчиков выходная величина изменяется пропорционально изменению входной величины. Пропорциональные датчики бывают двух видов - аналоговые и дискретные. У аналоговых непрерывное изменение входной величины соответствует аналогичному изменению выходной величины. У дискретных непрерывное изменение входной величины соответствует дискретному (прерывистому) изменению выходной величины. Дискретные датчики могут быть кодовыми и импульсными. У кодовых датчиков при изменении входной величины на выходе имеется код, чаще всего двоичный. У импульсных - при изменении входной величины на выходе меняется количество импульсов. Подсчитав число импульсов получают численное значение. Кодовые и импульсные датчики удобны при применении вычислительной управляющей техникой.
Путевые (конечные) выключатели относятся к простейшим двухпозиционным датчикам, типа датчиков логического состояния: «ДА»-«НЕТ», «ВКЛЮЧЕНО»-«ВЫКЛЮЧЕНО». Устанавливаются они на пути движения подвижных частей оборудования, инструмента, средств автоматизации, деталей, а также в командоаппаратах. Эти датчики обеспечивают выдачу командных воздействий при достижении датчика подвижными частями или деталью, выступа кулачка или флажка командоаппарата.
По командам этих датчиков может производиться остановка привода одних подвижных частей и включение привода других, переключение режимов работы, например на замедленный или ускоренный ход и т.п. Эти же выключатели могут использоваться для выдачи сигналов блокировки неправильных действий, сигналов наличия или отсутствия объекта.
Путевые (конечные) контактные электрические выключатели в зависимости от характера движения чувствительного органа подразделяются на нажимные и рычажные.
На рис. 1 приведена схема путевого (конечного) электрического контактного выключателя нажимного действия.
Работает датчик следующим образом: под воздействием подвижных частей оборудования, оснастки средств автоматизации или деталей, которые при своём движении перемещают нажимной штырь 1 и передвижной шток 2, преодолевая сопротивления пружины 3. Одновременно со штоком 2 перемещается контактный мостик 5, размыкая контакты 4 и выключая работающий исполнительный механизм, а затем замыкая контакты 7 и включая в работу другой исполнительный механизм. После освобождения нажимного штыря от внешнего воздействия пружина перемещает штырь, шток и мостик висходное положение, размыкая контакты 7 и замыкая контакты 4.
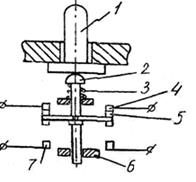
Рис. 1.Схема путевого (конечного) электрического контактного выключателя нажимного действия: 1- нажимной штырь; 2- подвижный шток; 3 - пружина; 4 - нормально замкнутые контакты; 5 - контактный мостик; 6 - корпус датчика; 7 - нормально разомкнутые контакты
У подобных выключателей (ВК-100, ВК-133) при скоростях перемещения командного органа менее 0,4 м/мин длительно действующая электрическая контактная дуга быстро разрушает контакты. В связи с этим при малых скоростях перемещения применяют выключатели моментного действия: микропереключатели и поворотные путевые (конечные) выключатели.
На рис. 2 изображён микропереключатель МП-1М, требующий малого усилия для перемещения штока, отличающийся малыми размерами и высокой точностью работы.
Нажимной шток 1 переключателя нажимает при внешнем воздействии на контактную пружинящую пластину 2, находящуюся в положении близком к неустойчивому. Поэтому при небольшом перемещении штока контактная пластина мгновенно перебрасывается от одного из контактов 4 к другому 3.
На рис. 3 изображен широко распространённый поворотный путевой выключатель ВК-211 в исходном положении. При внешнем воздействии на ролик 1 поворачивается рычаг 2 и поводок 9, соединённые валиком 8, при этом некоторое время планка 12, удерживаемая запирающей собачкой 13, остаётся неподвижной до тех пор, пока поводок 9не отодвинет запирающую собачку. В этот момент подпружиненный шарик 11 мгновенно повернёт планку 12 и, связанный с ней валиком 7, рычаг 5. При этом происходит переключение одной пары контактов 4 с двумя изолированными мостиками 3 на другую пару контактов. Две пары неподвижных контактов 4 смонтированы в неподвижных коробках 6. Возврат выключателя в исходное положение производится пружиной 10 после прекращения внешнего воздействия. Положение рычага 2 на валике 8 можно изменять в пределах ±  .
.
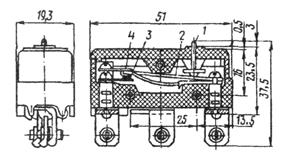
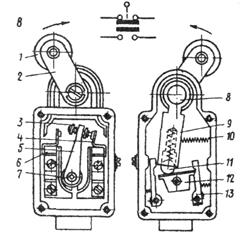
Рис. 2. микропереключатель МП - 1М Рис. 3. поворотный выключательВК-211
Недостатком контактных электрических путевых выключателей является подгорание контактов при их размыкании образуемой электрической дугой, пожаро- и взрывоопасность, удары и износ при механическом внешнем контакте, чувствительность внешнего механического контакта к перекосам, отклонениям, зазорам в подвижных соединениях, недостаточная долговечность и надёжность.
В значительной степени лишены этих недостатков бесконтактные путевые электрические выключатели.
На рис. 4 дана упрощённая схема путевого бесконтактного выключателя БВК-24.
В корпусе 1 бесконтактного выключателя БВК-24 смонтирована электрическая схема и выполнен паз между сердечником трансформаторного датчика.
| В датчике выполнены три обмотки: первичная и две вторичные, соединенных так, чтобы наводимые в них электродвижущие силы действовали навстречу друг другу, т.е. были сдвинуты по фазе на 180°. Трансформаторный датчик и усилитель подключены к электромагнитному реле P таким образом, что оно срабатывает при введении в паз между сердечником датчика алюминиевого лепестка (экрана) 2, связанного с подвижной частью оборудования, средств автоматизации 3. | 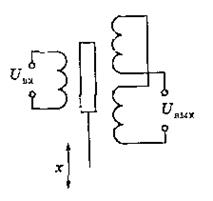
|
Контакты реле замыкаются, и включается в работу исполнительный механизм. При выведении лепестка из паза датчика реле отключается и контакты размыкаются.
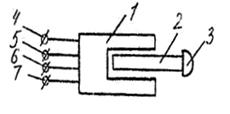
Рис. 4.Упрощенная схема бесконтактного выключателя БВК-24: 1 - корпус выключателя; 2- алюминиевый лепесток (экран); 3 -подвижнаячасть оборудования средства автоматизации; 4, 5- управляемая цепь исполнительного механизма; 6, 7- подвод питании датчика
В качестве путевых электрических выключателей могут использоваться также электрические магнитоуправляемые герметические контактные датчики - герконы. На рис. 5 приведена схема геркона.
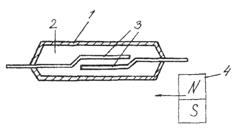
Рис. 5. Схемаэлектрического магнитоуправляемого герметичного контактного датчика (геркона): 1 - стеклянная оболочка; 2- вакуумная полость; 3 -пружинные контакты: 4– магнит
При подходе магнита пружинные контакты замыкаются, при удалении размыкаются. Такой датчик имеет ряд достоинств: он малогабаритный, вакуум обеспечивает отсутствие электрической дуги и подгорания контактов. Магнит не касается датчика, т. е. отсутствует непосредственный механический контакт. Датчик прост по устройству, надёжен и долговечен.
В качестве путевых электрических выключателей можно также использовать индукционные локаторы ближнего действия, схема одного из которых дана на рис. 6.
Рис. 6. Схема индукционного датчика У-511: 1 - чувствительный элемент - чашка; 2- генератор синусоидальных колебаний; 3 - усилитель; 4 -металлический объект
Генератор 2 создаёт гармонические синусоидальные колебания. При подходек чувствительному элементу 1 металлического объекта 4 изменяется индуктивность системы, происходит выход из резонансного режима - срыв генерации колебаний. При этом усилитель выдаёт сигнал, который может быть использован в цепи управления для включения исполнительного механизма. Кроме того, индукционные датчики могут быть использованы как датчики наличия и правильного расположения заготовки в штампе, в загрузочном устройстве и т. п., как локаторы ближнего действия при обнаружении металлических объектов.
|
|
Дата добавления: 2015-07-02; Просмотров: 1753; Нарушение авторских прав?; Мы поможем в написании вашей работы!