КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принципы рекурсивной фильтрации
|
|
|
|
Конструкция РЦФ отображается в z-образе передаточной функции фильтра в виде отношения двух многочленов:
H(z) = H0+H1z+H2z2+...= B(z)/[1+A(z)], (9.1.1)
где: B(z) = B0+B1z+B2z2+... +BNzN, A(z) = A1z+A2z2+... +AMzM.
Естественно, что переход на РЦФ имеет смысл только в том случае, если степень многочленов A(z) и B(z) во много раз меньше степени многочлена H(z) прямого z-преобразования импульсной реакции фильтра. При z-образе входных данных Х(z), на выходе РЦФ имеем:
Y(z) = H(z)Х(z) = X(z)B(z)/[1+A(z)],
Y(z)[1+A(z)] = Y(z)+Y(z)A(z) = X(z)B(z),
Y(z) = X(z)B(z)-Y(z)A(z). (9.1.2)
При обратном z-преобразовании выражения (9.1.2) получаем уравнение рекурсивной цифровой фильтрации:
yk = bn xk-n –
bn xk-n – am yk-m. (9.1.3)
am yk-m. (9.1.3)
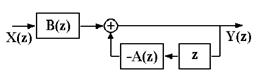 Рис. 9.1.1. Схема РЦФ. Рис. 9.1.1. Схема РЦФ.
|
Рекурсивная фильтрация требует задания начальных условий как по xk, так и по yk при k<0. Схема рекурсивной фильтрации приведена на рис. 9.1.1.
Как следует из выражения (9.1.3), при вычислении значения уk текущей точки используются предыдущие вычисленные значения yk-m, (m>0), что и определяет принцип рекурсии - фильтрации с обратной связью. Другой особенностью РЦФ является их односторонность и физическая реализуемость в реальном масштабе времени. При машинной обработке данных многочлен B(z) передаточной функции фильтра может реализоваться и в двухстороннем варианте.
Одно из важнейших свойств рекурсивных фильтров - возможность получения узких переходных зон при конструировании частотных фильтров, так как функция H(z) фильтра может резко изменяться при приближении к нулю (но не нулевого) многочлена в знаменателе (9.1.1).
Рекурсивная фильтрация требует более высокой точности вычислений по сравнению с нерекурсивной, т.к. использование предыдущих выходных отсчетов для текущих вычислений может приводить к накапливанию ошибок. Особое значение это имеет для фильтров с передаточными функциями высоких порядков (M>3), которые чувствительны к эффектам конечной разрядности. Такие фильтры, как правило, разбиваются на фрагменты – звенья второго и/или первого порядка, и реализуются в каскадной или в параллельной форме.
|
|
|
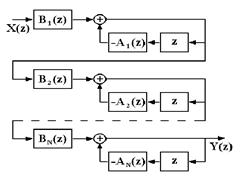 Рис. 9.1.2. Каскадная форма.
Рис. 9.1.2. Каскадная форма.
|
Каскадная форма. Находятся корни многочленов А(z), B(z) и производится разложение H(z):
H(z) =  , (9.1.4)
, (9.1.4)
где G - масштабный множитель. Это позволяет применять каскадное построение фильтров, показанное на рис. 9.1.2, в котором:
H(z) = G H1(z) H2(z)..... HN(z),
Hn(z) = Bn(z)/An(z). (9.1.5)
Функции Аn(z) и Bn(z) обычно представляются в виде биквадратных блоков (фильтров второго порядка):
Bn(z) = bn.0 + bn.1 z + bn.2 z2, An(z) = 1 + an.1 z + an.2 z2.
В принципе, порядок расположения блоков в каскадной форме, равно как и порядок множителей B(z) и A(z) в числителе и знаменателе функции (9.1.4), значения не имеет. Однако следует учитывать, что полюса знаменателя, близкие к единичной окружности на z-плоскости (близкие по модулю к 1) формируют большие коэффициенты усиления на соответствующих частотах в блоках, в которых они находятся, и при обработке сигналов могут вызывать переполнение разрядов числовых ячеек этих блоков, если их разрядность ограничена. С учетом этого при формировании каскадов желательно объединять в пары Bi(z)/Ai(z) нули и полюса, близкие по модулю к 1, и располагать их в концевые блоки каскадной формы. Такое комбинирование полезно также с позиций наилучшего отношения сигнал/шум.
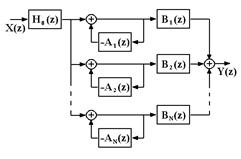 Рис. 9.1.3. Параллельная форма.
Рис. 9.1.3. Параллельная форма.
|
Параллельная форма. Функция H(z) разлагается на элементарные дроби:
H(z) = Ho(z)Bn(z) / [1+An(z)],
что дает параллельную форму фильтра, показанную на рис. 9.1.3. Параллельная конструкция фильтра применяется реже каскадной, хотя это может объясняться и тем, что в аналоговых фильтрах, исторически предшествовавших цифровым фильтрам, теоретическая база анализа и синтеза каскадных рекурсивных фильтров получила детальное развитие.
|
|
|
Стандартные блоки рекурсивных фильтров обычно реализуются биквадратными звеньями в канонической форме, которая имеет минимальное количество элементов задержки. Уравнения звена:
v(k) = x(k) – a(n) v(k-n), y(k) =
a(n) v(k-n), y(k) =  b(n) v(k-n). (9.1.6)
b(n) v(k-n). (9.1.6)
 Рис. 9.1.4. Каноническая форма
Рис. 9.1.4. Каноническая форма
|
Функциональная схема реализации звена приведена на рис. 9.1.4.
Вторая форма реализации – по уравнению (9.1.5) в прямой форме, приведенная на рис. 9.1.5:
y(k) = b(n) x(k-n) –a(n) y(k-n). (9.1.7)
 Рис. 9.1.5. Прямая форма Рис. 9.1.5. Прямая форма
|
При определенных условиях прямая форма лучше канонической с точки зрения шумовых характеристик.
При нулевых значениях коэффициентов a2 и b2 звенья второго порядка превращаются в звенья первого порядка.
Устранение сдвига фазы. Рекурсивные фильтры являются фазосдвигающими фильтрами. Если требуется обеспечить нулевой фазовый сдвиг, то операция фильтрации производится дважды, в прямом и обратном направлении числовой последовательности массива данных, при этом амплитудно-частотная характеристика (АЧХ) фильтрации будет равна |H(w)|2 фильтра, что необходимо учитывать при конструировании фильтра.
9.2. Разработка Рекурсивных цифровых фильтров [43].
Синтез рекурсивных фильтров непосредственно в z-области возможен только для фильтров простого типа с ограниченным количеством полюсов и нулей (особых точек). В общем случае, процесс проектирования рекурсивного фильтра обычно заключается в задании необходимой передаточной характеристики фильтра в частотной области и ее аппроксимации с определенной точностью какой-либо непрерывной передаточной функцией, с последующим z-преобразованием для перехода в z-область. Первые две операции хорошо отработаны в теории аналоговой фильтрации сигналов, что позволяет использовать для проектирования цифровых фильтров большой справочный материал по аналоговым фильтрам. Последняя операция является специфичной для цифровых фильтров.
Для алгебраического преобразования непрерывной передаточной функции в многочлен по z используется билинейное преобразование, известное в теории комплексных переменных под названием дробно-линейного преобразования.
Этапы разработки рекурсивных фильтров включают:
|
|
|
1. Задание частотной характеристики или передаточной функции фильтра.
2. Аппроксимация и расчет коэффициентов b(n) и a(m) передаточной функции фильтра (9.1.3). Этот этап может выполняться четырьмя методами:
· Метод размещения нулей и полюсов на комплексной z-плоскости.
· Метод инвариантного преобразования импульсной характеристики.
· Согласованное z-преобразование.
· Билинейное z-преобразование.
3. Выбор структуры реализации фильтра – параллельная или каскадная, блоками второго и/или первого порядка.
4. Программное или аппаратное обеспечение реализации фильтра.
Метод размещения нулей и полюсов применяется при разработке простых фильтров с ограниченным количеством нулей и полюсов, если параметры фильтра не обязательно задавать точно. Амплитудная характеристики системы может быть оценена по выражениям при перемещении точки ws по единичной окружности exp(-jwsDt):
|H(w)| =  Ui /
Ui / Vj, (9.2.1)
Vj, (9.2.1)
Каждой точке zs = exp(-jwsDt) может быть поставлен в соответствие вектор (zs – ni) на ni -нуль, модуль которого Ui = |(zs – ni)| отображает расстояние от zs до i-нуля, а равно и вектор (zs – pj) на pj-полюс с соответствующим расстоянием Vj = (zs – pj). Наибольшее влияние на изменение АЧХ по частоте оказывают нули и полюсы, расположенные ближе к единичной окружности. При расположении нуля непосредственно на окружности гармоника ws в этой точке полностью обнуляется (коэффициент передачи фильтра равен нулю). И, наоборот, при перемещении ws к полюсу, близкому к единичной окружности, происходит резкое нарастание коэффициента усиления системы.
В качестве иллюстрации метода выполним расчет фильтра со следующими параметрами:
1. Полная режекция сигнала на частотах 0 и 250 Гц.
2. Полоса пропускания с центром на fp = 125 Гц с шириной полосы по уровню 3 дб Dp =10 Гц.
3. Частота дискретизации данных fD = 500 Гц.
При частоте дискретизации 500 Гц интервал временной дискретизации Dt = 1/fD, а частота Найквиста fN = 1/2Dt = 250 Гц. Соответственно, нули передаточной функции располагаются в точках n1 = exp(-j2p 0 Dt) = 1 и n2 = exp(-j2p 250 Dt) = -1. Угол из начала координат z-плоскости на полюс p с учетом его сопряженности для получения действительных коэффициентов ±180o . fp/fN = ±90o. Значение радиуса r до полюса определяет ширину полосы пропускания и в первом приближении (при 0 < r < 1.1) оценивается по выражению:
|
|
|
r» 1 + (Dp/fD)p. r» 1.063.
Передаточная функция:
H(z) = (z-1)(z+1) / [(z-r exp(jp/2) (z-r exp(-jp/2)] = (z2 -1)/(z2 +r2) = Y(z)/X(z).
z2Y(z)+r2Y(z) = z2X(z)-X(z). Y(z) = [z2X(z)-X(z)-z2Y(z)] / r2.
Алгоритм фильтра:
y(k) = [x(k-2) – x(k) – y(k-2)] / r2.
При использовании символики z-1 полюс располагается внутри единичной окружности на том же радиусе со значением (при r < 1):
r» 1 - (Dp/fD)p. r» 0.937.
Передаточная функция и алгоритм фильтра:
H(z) = (z-1)(z+1) / [(z-r exp(jp/2) (z-r exp(-jp/2)] = (z2 -1)/(z2 +r2) = (1-z-2) / (1+r2 z-2).
y(k) = x(k) – x(k-2) – r2 y(k-2).
Характеристики фильтров приведены на рис. 9.2.1. Индексы h1, H1, y1 относятся к первому фильтру с полюсом за пределами единичной окружности, индексами h2, H2, y2 – внутри окружности (символика z-1). Импульсные отклики фильтров получены подачей на их входы импульса Кронекера, частотные характеристики вычислены по импульсным откликам. Значение r первого фильтра подобрано по АЧХ под равный коэффициент усиления гармоники fp со вторым фильтром, после чего коэффициенты фильтров нормированы по коэффициенту усиления к 1 на частоте fp.
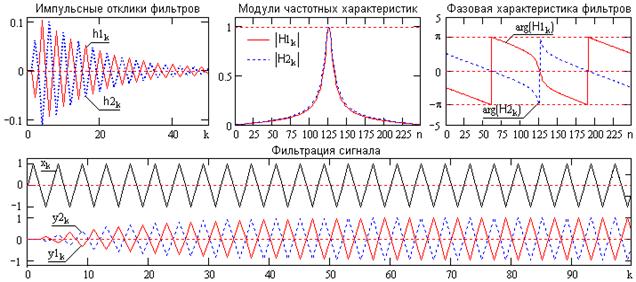
Рис. 9.2.1.
Как следует из рисунков, изменение многочлена по степеням z на 1/z хотя и изменило коэффициенты разностного уравнения фильтра, но практически не повлияло на его амплитудно-частотную характеристику. Однако при этом произошло изменение области сходимости фильтра с соответствующим изменением фазовых углов направления на полюсы из всех точек единичной окружности, что отразилось на фазово-частотной характеристике и отсчетах импульсного отклика фильтра изменением фазы на p.
Синтез систем непосредственно в z-области применяется, в основном, только для режекторных и селекторных фильтров и более детально рассматривается ниже.
Метод инвариантного преобразования импульсной характеристики применяется для получения из подходящей аналоговой передаточной функции H(s) с помощью преобразования Лапласа импульсной характеристики h(t), которая затем дискретизируется и подвергается z-преобразованию,
Допустим, имеется простая аналоговая система с передаточной функцией:
H(s) = C / (s-p).
Выполняем обратное преобразование Лапласа функции H(s) и дискретизируем результат преобразования с определенной постоянной времени Dt:
h(t) = TL-1[H(s)] = C exp(pt) → C exp(pnDt).
Выполняем z-преобразование и формируем передаточную функцию H(z):
H(z) = h(nDt) zn =C exp(pnDt) zn = C / (1-z exp(pDt)).
h(nDt) zn =C exp(pnDt) zn = C / (1-z exp(pDt)).
При преобразовании фильтров более высоких порядков функции H(s) раскладываются на простые дроби, для каждой из которых находится соответствующий блок Hi(z), а система в целом реализуется в параллельной форме.
Согласованное z-преобразование применяется для преобразования аналоговых фильтров в эквивалентные цифровые непосредственным переводом всех полюсов и нулей с s-плоскости в z-плоскость:
(s-a) → z exp(aDt).
Большинство полюсов и нулей являются комплексно сопряженными и реализуются фильтрами второго порядка:
(s-a)(s-a*) → 1 – 2z exp(Re(a)Dt) cos(Im(a)Dt) + z2 exp(Re(a)Dt).
Следует учитывать, что полоса частот аналоговых фильтров от нуля до бесконечности, а цифровых фильтров – от нуля до частоты Найквиста. При преобразовании происходит нелинейное сжатие бесконечной полосы частот в конечную с соответствующим искажением частотных характеристик фильтров.
Билинейное z-преобразование является основным методом получения коэффициентов рекурсивных БИХ-фильтров и использует следующую замену:
s = g (1-z) / (1+z), g = 1 или 2/Dt,
при этом ось jw s-плоскости отображается в единичную окружность z-плоскости, правая половина s-плоскости – внутрь единичной окружности, а левая половина с полюсами устойчивых аналоговых фильтров – снаружи единичной окружности. Аналогичная замена при отрицательной символике z-1 с соответствующей сменой отображения:
s = g (z-1) / (z+1).
Для фильтров верхних и нижних частот порядок фильтра H(z) равен порядку фильтра H(s). Для полосовых и заградительных фильтров порядок H(z) вдвое больше порядка H(s). Для сохранения частотных характеристик фильтра при нелинейном сжатии частотной шкалы аналогового фильтра (переход от ∞ к wN) предварительно выполняется деформация частотной шкалы аналогового фильтра. Более подробно эти вопросы рассмотрены ниже.
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 659; Нарушение авторских прав?; Мы поможем в написании вашей работы!