КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Показатели качества систем управления
|
|
|
|
Качество системы управления оценивается прямыми и косвенными (корневые и частотные) показателями качества. Прямые показатели качества определяются по кривым переходного процесса: это время регулирования tp – минимальное время, по истечении которого переходная характеристика будет оставаться близкой к установившемуся значению с требуемой точностью ∆; перерегулирование s - максимальное отклонение переходной характеристики от установившегося значения, выраженное в относительных единицах или процентах; время достижения первого максимума tm; время нарастания переходного процесса tн – абсцисса первой точки пересечения кривой h (t) c уровнем установившегося значения hу; частота и период затухающих колебаний w = 2p /T; степень затухания Y = (А 1 –А 3) /A 1; точность системы управления ε = хЗ – х.
Три главных показателя качества – перерегулирование, первое максимальное отклонение и длительность переходного процесса – зависят от всех параметров системы, но наиболее сильно – от передаточного коэффициента разомкнутого контура. Причём, с увеличением этого коэффициента максимальное отклонение по возмущению всегда уменьшается, а перерегулирование и длительность переходного процесса, как правило, увеличивается.
По АФЧХ разомкнутого контура определяют частотные показатели качества – запас устойчивости по амплитуде DА и запас устойчивости по фазе Dj, по логарифмическим АЧХ и ФЧХ – логарифмические запасы устойчивости по амплитуде (∆L, Gm) и фазе (∆φ, Pm). При проектировании систем обычно задаются запасом устойчивости по амплитуде DА = 0,5 – 0,6 и по фазе Dj ³ 30 – 60°. При этом обеспечивается, как правило, и удовлетворительное качество процесса управления.
|
|
|
Прямые и косвенные показатели качества характеризуют лишь одно какое-либо свойство системы, которые в совокупности носят противоречивый характер, и легко определяются в MATLAB.
В инженерной практике применяются интегральные критерии качества. Подинтегральная функция выбирается таким образом, чтобы интеграл наилучшим образом характеризовал качество системы и выражался (если это возможно) через коэффициенты передаточной функции замкнутой системы. Чтобы интеграл был сходящимся, в подинтегральную функцию вводят не абсолютные значения e (t) и х (t), а их отклонения от конечных, установившихся значений  .
.
Наибольшее распространение получили:
– линейная интегральная оценка
– модульная интегральная оценка
– улучшенная модульная оценка
– квадратичная интегральная оценка
– улучшенная квадратичная интегральная оценка
– интегральная оценка качества от квадратичных форм

Последний критерий обеспечивает наиболее плавные и быстрые переходные процессы, так как слагаемые под интегрального выражения запрещают большие отклонения, скорости и ускорения выходной координаты от заданных.
Эти же критерии используются и для определения оптимальных значений настроечных параметров регуляторов системы.
В теории оптимального управления применяются критерии максимального быстродействия
и минимума расхода энергии на управлении
 .
.
Данными критериями нужно руководствоваться при определении регуляторов для промышленных объектов управления.
Приближённую оценку прямых показателей качества удобно осуществлять на основе гипотезы об эквивалентности динамических свойств реальной замкнутой системы W (s) свойствам колебательного звена второго порядка с передаточной функцией
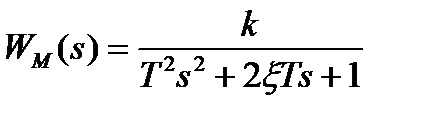
при x £ 0,707 и передаточным коэффициентом k = 1 для астатических и близким к единице для статических систем. При этом частотные характеристики системы и модели должны совпадать (или по крайней мере должны быть близки друг к другу) на нулевой, резонансной и в рабочем диапазоне частот.
|
|
|
Так как при синтезе АСР всегда стремятся показатели качества замкнутой системы оценивать по характеристикам разомкнутого контура, которые более просты и выбираются разработчиком, то для модели замкнутой системы желательно найти модель разомкнутого контура, при замыкании которого единичной жесткой отрицательной обратной связью получилось колебательное звено второго порядка (рис. 32).
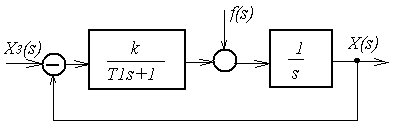
Рис. 32
Таким звеном является реальное интегрирующее звено, передаточная функция которого
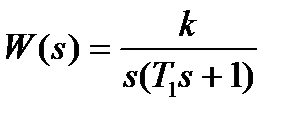 .
.
Передаточная функция замкнутой системы
 ,
,
где  - собственная частота колебаний системы,
- собственная частота колебаний системы,  - коэффициент затухания.
- коэффициент затухания.
Такой подход позволяет оценивать динамические свойства реальных систем по приближённым формулам
s @ 0,2 sqrt(кТ1); tp @ 6T1; M @ 1,1 sqrt(кТ1); Dj @ 0,2/s;
wp @ sqrt (кТ1 – 0,5) /T1.
Эти формулы обеспечивают достаточную для инженерных расчетов точность оценки качества реальной системы. Кривые переходных процессов при
ξ = 0,5;0,707 и 1 приведены на рис. 33.
Если реальная система астатическая и содержит одно идеальное интегрирующее и n апериодических звенев первого порядка с коэффициентами передачи ki и постоянными времени Тi, то
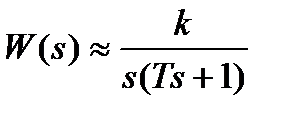 ;
; 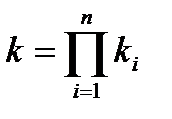 ;
;  .
.
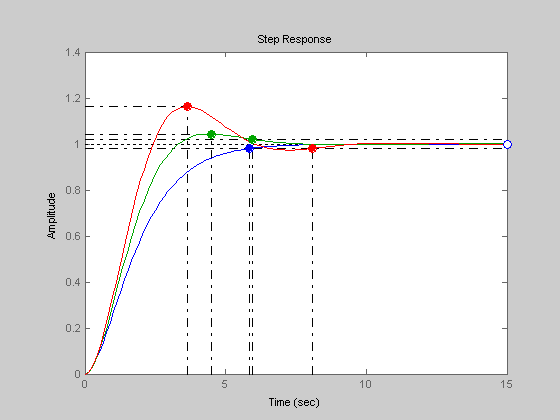
Рис. 33
Если реальная система статическая и содержит только n апериодических звеньев первого порядка, то k = (k1*k2* …*kn)/T1, а Т = (Т2+Т3+ …+Тn).
Аппроксимированная передаточная функция имеет ряд свойств, тождественных точной передаточной функции W(s) при оптимальной настройке. Как у той, так и у другой равны три первых временных момента для импульсной реакции, поскольку их значения определяются только коэффициентами до s2 включительно. Равенству этих моментов соответствует равенство коэффициентов ошибок по положению, скорости и ускорению.
Выбор регуляторов для систем управления электроприводом постоянного и переменного тока основан на современной теории управления и критериях модульного, симметричного и компромиссного оптимумов. Эти критерии оптимизируют амплитудную частотную характеристику разомкнутого контура системы управления. В качестве объекта управления будем рассматривать двигатель постоянного или переменного тока, обобщённая структурная схема которых показана на рис. 34. Особенность синтеза регуляторов для таких систем – не учитывается обратная связь по эдс.
|
|
|
WOC(s)
e(s) ω(s)
UЗ(s) U(s) ∆(s) ω(s)
W1(s) W2(s) W3(s)
ω0
M(s)
Рис. 34
Звено с передаточной функцией
можно рассматривать как тиристорный преобразователь напряжения или частоты;
 -
-
двигатель постоянного тока с независимым возбуждением или асинхронный двигатель с короткозамкнутым ротором, WOC(s) = k – обратная связь по эдс или скорости.
|
|
|
|
|
Дата добавления: 2015-08-31; Просмотров: 3229; Нарушение авторских прав?; Мы поможем в написании вашей работы!