КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Насыщение исполнительного устройства
Нелинейность исполнительного устройства типа насыщения может создать проблемы при проектировании систем управления с неустойчивыми по входу управляющими устройствами. Исполнительное устройство, с которого снимается управляющее воздействие, обычно имеет ограничения такие как, например, максимальная допустимая скорость двигателя или максимально открытый вентиль. При этом формируемое управляющее воздействие u (t) (рис. 1) не может превышать предельного значения  , т.е.
, т.е.  .
.
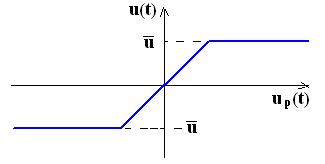
Рис. 1
Здесь up (t) – сигнал, снимаемый с выхода управляющего устройства. При этом структурная схема системы с управляющим устройством и объектом, которые описываются ПФ соответственно  и
и  , показана на рис. 2.
, показана на рис. 2.

Рис. 2
Рассмотрим в качестве управляющего устройства ПИД-регулятор, изображение выходного сигнала которого можно представить в виде
Интегральная часть ПИД-регулятора с выходным сигналом

не является устойчивой по входу (по ошибке управления  ) и порождает проблемы, связанные с насыщением исполнительного устройства (ИУ).
) и порождает проблемы, связанные с насыщением исполнительного устройства (ИУ).
Дело в том, что, когда имеет место насыщение ИУ, т.е. когда  (рис. 3), то обратная связь оказывается разомкнутой, другими словами, сигнал
(рис. 3), то обратная связь оказывается разомкнутой, другими словами, сигнал  не влияет на управляющее воздействие
не влияет на управляющее воздействие  , так что сигнал остается неизменным по знаку и величине, между тем интегратор продолжает интегрировать ошибку. При этом его выходная величина (выход интегральной составляющей) может стать очень большой, как говорят, происходит накопление сигнала на интеграторе (wind up), и это обстоятельство является причиной длительного времени, необходимого для уменьшения выходной величины интегратора после изменении знака ошибки, интегратор, как еще говорят, залипает. Итак, знак ошибки изменился в момент времени t1, что говорит о появлении перерегулирования, а управляющий сигнал в силу залипания интегратора длительное время сохраняет свою полярность,
, так что сигнал остается неизменным по знаку и величине, между тем интегратор продолжает интегрировать ошибку. При этом его выходная величина (выход интегральной составляющей) может стать очень большой, как говорят, происходит накопление сигнала на интеграторе (wind up), и это обстоятельство является причиной длительного времени, необходимого для уменьшения выходной величины интегратора после изменении знака ошибки, интегратор, как еще говорят, залипает. Итак, знак ошибки изменился в момент времени t1, что говорит о появлении перерегулирования, а управляющий сигнал в силу залипания интегратора длительное время сохраняет свою полярность,
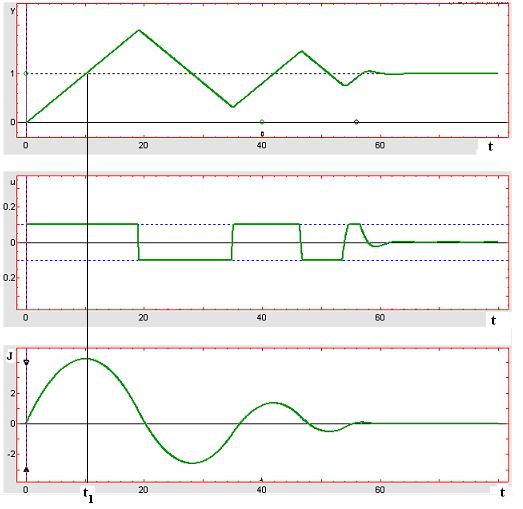
Рис. 3
продолжая увеличивать управляемую величину. Следствием такого явления
может стать большое перерегулирование.
Графики, представленные на рис. 3, соответствуют системе, для которой
 = 0,1, K= 1, Ti= 1,2 c, Td= 0, W 1 (p)= 1 /p.
= 0,1, K= 1, Ti= 1,2 c, Td= 0, W 1 (p)= 1 /p.
Антинакопление (antiwind up)
Существует несколько методов, позволяющих бороться с накоплением. Метод слежения является самым простым и иллюстрируется схемой, представленной на рис. 4. Сигнал  (t) равен разности между выходом ПИД-регулятора up (t) и выходом исполнительного устройства u (t).
(t) равен разности между выходом ПИД-регулятора up (t) и выходом исполнительного устройства u (t).
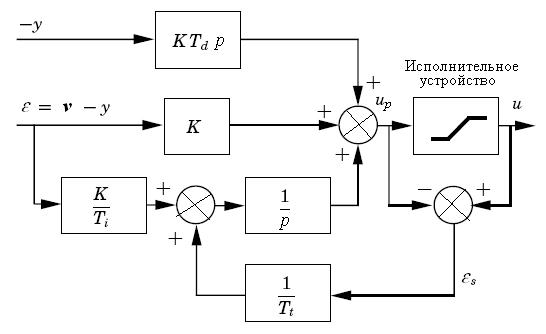
Рис. 4
Сигнал  поступает на вход интегратора посредством звена с коэффициентом усиления
поступает на вход интегратора посредством звена с коэффициентом усиления  . Этот сигнал равен нулю, если нет насыщения. В этом случае он не оказывает никакого влияния на интегратор. Когда исполнительное устройство насыщается, сигнал
. Этот сигнал равен нулю, если нет насыщения. В этом случае он не оказывает никакого влияния на интегратор. Когда исполнительное устройство насыщается, сигнал  (t) =
(t) = - up (t) отличен от нуля и стремится так изменить выходной сигнал интегратора, чтобы выходной сигнал регулятора оставался близким к предельному значению исполнительного устройства . Идея метода слежения видна из структурной схемы (рис. 5).
- up (t) отличен от нуля и стремится так изменить выходной сигнал интегратора, чтобы выходной сигнал регулятора оставался близким к предельному значению исполнительного устройства . Идея метода слежения видна из структурной схемы (рис. 5).

Рис. 5
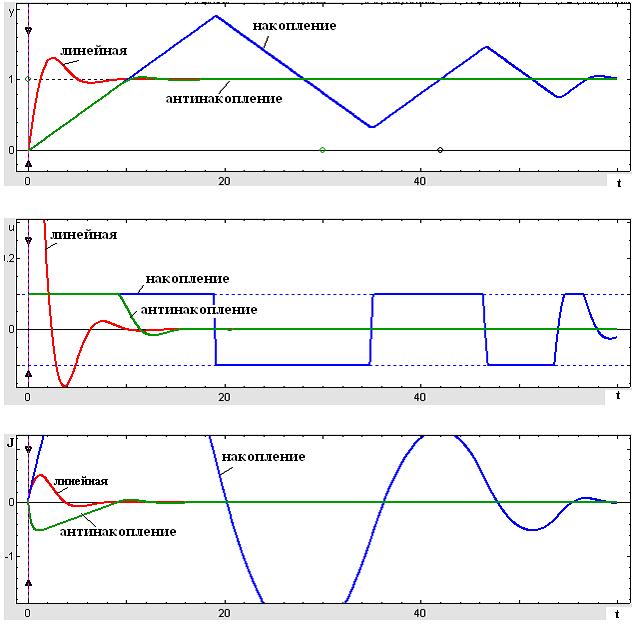
Рис. 6
На рис. 6 приведены графики, показывающие эффект от охвата интегратора
дополнительной обратной связью, обеспечивающий слежение сигнала up (t)
за сигналом в режиме насыщения.
|
|
Дата добавления: 2014-01-04; Просмотров: 369; Нарушение авторских прав?; Мы поможем в написании вашей работы!