КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Канал рыскания
|
|
|
|
Формирование управляющего сигнала при заходе на посадку.

Дифференцируя получим:
 ,
,
но в спокойной атмосфере θ 0=0, для изолированного бокового движения вариации скорости полагаются отсутствующими (D W =0). Поскольку обычно отсчет угла пути производится от заданного направления, то  . Тогда кинематическое уравнение приобретает вид:
. Тогда кинематическое уравнение приобретает вид:
 , где , где  УС – угол сноса от бокового ветра, УС – угол сноса от бокового ветра,  - путевая скорость. - путевая скорость.
|
 , где:
, где:
 - наклонная дальность до курсового радиомаяка.
- наклонная дальность до курсового радиомаяка.
 и
и 
Закон управления:

Фильтр Т=2с обеспечивает фильтрацию высокочастотных помех в сигнале производной  . Сигнал ошибки по курсу
. Сигнал ошибки по курсу  так же, как и сигнал
так же, как и сигнал  , обеспечивает необходимое качество переходных процессов выхода самолета на линию посадки. Этот сигнал формируется по нелинейному закону как
, обеспечивает необходимое качество переходных процессов выхода самолета на линию посадки. Этот сигнал формируется по нелинейному закону как  . Иногда вместо производной закон управления содержит обратную связь по углу рыскания
. Иногда вместо производной закон управления содержит обратную связь по углу рыскания  , отсчитываемому относительно оси ВПП, как это представлено на структурной схеме
, отсчитываемому относительно оси ВПП, как это представлено на структурной схеме
Структурная схема:
 , где
, где  , а
, а
 - передаточная функция фильтра радиошумов
- передаточная функция фильтра радиошумов
Характер переходных процессов выхода самолета на ЛЗП для закона управления и типовых значениях передаточных чисел иллюстрирует рисунок. Для примера выбраны два различных начальных положения самолета. В обоих случаях длительность переходных процессов одинакова, но характер изменения углов крена зависит от начальных условий.
Если самолет летит параллельным курсом ( ), то выход на ЛЗП выполняется так называемым двойным доворотом; сначала самолет выполняет вираж в сторону заданной траектории (
), то выход на ЛЗП выполняется так называемым двойным доворотом; сначала самолет выполняет вираж в сторону заданной траектории ( ), а затем изменяет направление крена (рисунок а). Во втором случае (
), а затем изменяет направление крена (рисунок а). Во втором случае ( ) в ходе разворота знак угла крена не меняется (рисунок б). Заметим также, что в последнем случае «срабатывает» ограничитель заданного угла крена («полочка» в графике изменения γ).
) в ходе разворота знак угла крена не меняется (рисунок б). Заметим также, что в последнем случае «срабатывает» ограничитель заданного угла крена («полочка» в графике изменения γ).
|
|
|
Использование вместо линейного отклонения z угловой меры отклонение центра масс самолета от заданной траектории создает определенные трудности в формировании закона управления. При переходе к  контур управления становится существенно нестационарным, коэффициент усиления контура зависит от дальности до наземного маяка, поскольку при замыкании контура по
контур управления становится существенно нестационарным, коэффициент усиления контура зависит от дальности до наземного маяка, поскольку при замыкании контура по  в нем появляется звено, зависящее от
в нем появляется звено, зависящее от  .
.
Графики переходных процессов выхода самолёта на линию заданного пути: а) -  б) -
б) - 
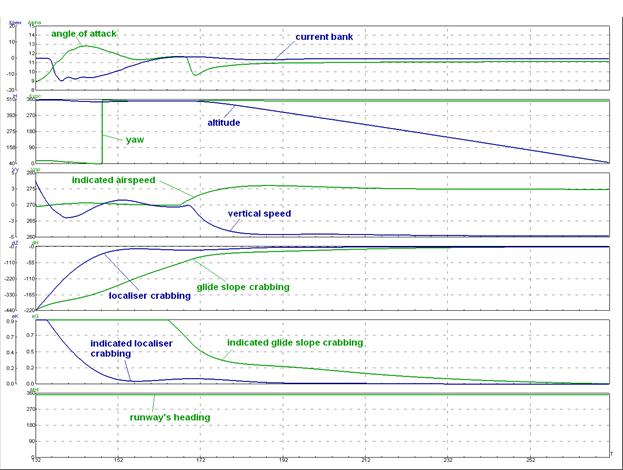
Осциллограмма работы режима АЗП

| 
|
Пилотажный и навигационный кадры при работе АЗП

Режим АЗП по индикации на ИКШ
|
|
|
|
Дата добавления: 2014-01-04; Просмотров: 445; Нарушение авторских прав?; Мы поможем в написании вашей работы!