КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Процесах
|
|
|
|
Оптимізація енергоспоживання в перехідних
В якості показника економічності електропривода в перехідних процесах використовують величину енергії втрат за час перехідного процесу. Енергія, яка витрачається за час перехідного процесу, має дві складові: корисну, яка йде на виконання певної механічної робо-ти, і енергію втрат.
Корисна складова визначається добутком моменту двигуна на його швидкість. При цьому в режимі розгону енергія із мережі вит-рачається на виконання механічної роботи та на збільшення кінети-чної енергії рухомих частин електропривода, а в режимах гальмува-ння кінетична енергія рухових частин повертається у мережу (реку-перативне гальмування) за вирахуванням втрат, або перетворюється у тепло (динамічне гальмування і гальмування противмиканням). На величину корисної енергії, яка визначається технологічним процесом, в пускових режимах вплинути не можна.
Втрати енергії визначають через втрати потужності, які поді-ляються на постійні та змінні (див. п.6.1). При регулюванні швидко-сті АД постійні втрати не є сталими, а залежать від швидкості дви-гуна, амплітуди та частоти напруги живлення і інших факторів. Але ці втрати змінюються у незначних межах і складають незначну час-тину загальних втрат. Тому ними нехтують.
Найбільшу складову мають змінні втрати потужності, які скла-даються з втрат в обмотках статора і ротора (втрати у міді):
 , (12.8)
, (12.8)
де  і
і  – відповідно струми в обмотках статора і ротора;
– відповідно струми в обмотках статора і ротора;  і
і  – активні опори цих обмоток.
– активні опори цих обмоток.
Представивши АД Г-подібною схемою заміщення, втрати у міді будуть рівними
 . (12.9)
. (12.9)
Тоді змінні втрати енергії за час перехідного процесу 
 . (12.10)
. (12.10)
|
|
|
Використати (12.10) для визначення шляхів зменшення втрат складно, бо згідно (12.9) треба знати закони зміни в часі  , і
, і  . Більш простіше використати те, що втрати потужності в обмот-ці ротора дорівнюють втратам електромагнітної потужності, тобто
. Більш простіше використати те, що втрати потужності в обмот-ці ротора дорівнюють втратам електромагнітної потужності, тобто
 . (12.11)
. (12.11)
Звідки втрати енергії в обмотці ротора за час перехідного процесу
 . (12.12)
. (12.12)
Залежність (12.12) також складна для обчислень. Її можна спрос-тити, використавши рівняння руху електропривода (2.6). З (2.6) виз-начаємо
 , (12.13)
, (12.13)
бо  . Підставивши значення
. Підставивши значення  у (12.12) і замінивши межі інтегрування, одержимо
у (12.12) і замінивши межі інтегрування, одержимо

 . (12.14)
. (12.14)
Рівняння (12.14) використовують, зазвичай, для визначення втрат енергії при роботі електропривода без навантаження 
 . У цьому випадку
. У цьому випадку
 . (12.15)
. (12.15)
За рівнянням (12.15) визначають втрати енергії в роторі АД при пуску, гальмуванні і реверсі за умови  .
.
При пуску  і
і  , тому
, тому
 . (12.16)
. (12.16)
З (12.16) слідує, що втрати енергії у роторі чисельно рівні запасу кінетичної енергії в рухомих частинах електропривода, бо  є при-веденим моментом інерції.
є при-веденим моментом інерції.
В режимі динамічного гальмування  ,
,  і
і 
 . При цьому вся кінетична енергія електропривода пере-творюється у тепло, яке виділяється в обмотці ротора.
. При цьому вся кінетична енергія електропривода пере-творюється у тепло, яке виділяється в обмотці ротора.
При гальмуванні противмиканням  , і втрата ене-ргії
, і втрата ене-ргії  , тобто у три рази більша, ніж при пуску.
, тобто у три рази більша, ніж при пуску.
При реверсі , і  , що у чотири рази більша, ніж при динамічному гальмуванні чи пуску.
, що у чотири рази більша, ніж при динамічному гальмуванні чи пуску.
Отже, втрата енергії в роторі за час перехідного процесу за умо-ви не залежить від часу і від моменту двигуна, а визна-чається лише початковим  і кінцевим
і кінцевим  значеннями ковзання і моментом інерції електропривода.
значеннями ковзання і моментом інерції електропривода.
Для визначення сумарних втрат енергії в обмотках АД необхідно знати втрати в обмотці статора, які згідно (12.9) дорівнюють  . В двигунах з короткозамкненим ротором за-гального призначення (з круглими пазами)
. В двигунах з короткозамкненим ротором за-гального призначення (з круглими пазами)  і втрати енергії в обмотках статора і ротора приблизно рівні. Використовуючи АД зі спеціальною конструкцією ротора (з глибоким пазом, з подвій-ною «кліткою білки» та інші), які мають
і втрати енергії в обмотках статора і ротора приблизно рівні. Використовуючи АД зі спеціальною конструкцією ротора (з глибоким пазом, з подвій-ною «кліткою білки» та інші), які мають  , можна значно зменшити втрати енергії в обмотці статора.
, можна значно зменшити втрати енергії в обмотці статора.
|
|
|
Сумарні втрати енергії в обмотках

 . (12.17)
. (12.17)
Повна втрата енергії в перехідних процесах
 , (12.18)
, (12.18)
де  – сталі втрати потужності в АД;
– сталі втрати потужності в АД;  – час перехідного про-цесу.
– час перехідного про-цесу.
Втрати енергії в перехідних процесах при  визначають за (12.14). Для цього потрібно знати залежності
визначають за (12.14). Для цього потрібно знати залежності  і
і  , що досить складно. Тому для оцінки втрат енергії приймають, що мо-мент двигуна і статичний момент не змінюються і дорівнюють се-реднім значенням
, що досить складно. Тому для оцінки втрат енергії приймають, що мо-мент двигуна і статичний момент не змінюються і дорівнюють се-реднім значенням  і
і  . Тоді згідно (12.14)
. Тоді згідно (12.14)
 . (12.19)
. (12.19)
З (12.19) слідує, що втрати енергії при зменшенні  збільшуються. Тому, якщо допустимо за технологією, доцільно про-водити пуск без навантаження і його підключати, наприклад, з допомогою електромагнітної муфти.
збільшуються. Тому, якщо допустимо за технологією, доцільно про-водити пуск без навантаження і його підключати, наприклад, з допомогою електромагнітної муфти.
З аналізу (12.15) і (12.17) витікає, що основними способами змен-шення втрат енергії в перехідних процесах є:
Ø зменшення моменту інерції електропривода ;
Ø регулювання під час перехідного процесу швидкості ідеаль-ного холостого ходу  .
.
Ці способи особливо ефективні для електроприладів з частими пусками та гальмуваннями (ліфти, мостові крани, маніпулятори, виконавчі механізми тощо).
Зменшити момент інерції можна за рахунок:
Ø використання малоінерційних двигунів;
Ø оптимального передаточного числа редуктора (формула (2.17)) чи оптимальних масогабаритних показників передавального пристрою;
Ø заміною одного двигуна двома і більшою кількістю зі збере-реженням сумарної потужності. Сумарний момент інерції, наприк-лад, двох двигунів половинної потужності значно менший моменту інерції одного двигуна повної потужності.
Регулювання швидкості можна здійснювати шляхом зміни числа пар полюсів багатошвидкісних АД або зміною частоти жив-лення в системах ПЧ-АД.
Для прикладу розглянемо процеси пуску при двошвид-кісного АД зі швидкостями  і . При розгоні зі швид-кості
і . При розгоні зі швид-кості 
 до
до 


 . При розгоні зі швидкості до швид-кості
. При розгоні зі швидкості до швид-кості  за рахунок перемикання обмотки статора
за рахунок перемикання обмотки статора  . Сумарні втрати в обмотці ро-тора
. Сумарні втрати в обмотці ро-тора  , що у два рази менше, ніж при прямому пуску.
, що у два рази менше, ніж при прямому пуску.

 У загальному випадку, якщо швидкість ідеального холостого ходу у перехідному процесі має
У загальному випадку, якщо швидкість ідеального холостого ходу у перехідному процесі має  ступенів, то втрати енергії в роторі
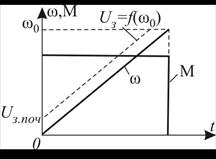
ступенів, то втрати енергії в роторі  . Змінюючи за лінійним законом задаючий сигнал, пропорційний швидкості за рахунок відповідної змі-ни частоти живлення АД (рис. 12.2), можна зменшити втрати енергії в обмотці ротора у 5-10 разів в залежності від типу і потужності двигуна. При пов-торно-короткочасному режимі роботи (пуск-гальмування) най-меншим втратам відповідає параболічний закон зміни швид-кості
. Змінюючи за лінійним законом задаючий сигнал, пропорційний швидкості за рахунок відповідної змі-ни частоти живлення АД (рис. 12.2), можна зменшити втрати енергії в обмотці ротора у 5-10 разів в залежності від типу і потужності двигуна. При пов-торно-короткочасному режимі роботи (пуск-гальмування) най-меншим втратам відповідає параболічний закон зміни швид-кості  .
.
|
|
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 358; Нарушение авторских прав?; Мы поможем в написании вашей работы!