КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Выбор средств коммуникации
|
|
|
|
Коммуникационные возможности контроллеров. К параметрам контроллеров, характеризующим их способность взаимодействовать с другими устройствами системы управления, относятся:
• количество и разнообразие портов в ПЛК;
• широта набора интерфейсных модулей и интерфейсных процессоров, поставляемых основным разработчиком ПЛК и другими поставщиками, поддеживающими бренд ПЛК.;
• реализованные в ПЛК протоколы;
• скорость обмена данными и протяженность каналов связи.
Коммуникационная связь работает по принципу ведущий-ведомый
(master-slave). Только ведущее устройство может инициировать обмен данными. Ведомые устройства пассивно прослушивают все данные, идущие по линии связи, и только в случае получения запроса от ведущего устройства отправляют обратно ответ. Каждое устройство на канале связи имеет свой уникальный сетевой адрес, необходимый для однозначной идентификации. Узлы ввода/вывода, как правило, являются ведомыми устройствами, в то время как контроллеры - ведущими.

|
| Узел 5, прослушивая все запросы на шине, узнает тот, что адресован ему. Он считывает показания датчика давления и формирует в ответ следующее сообщение: |
Пример протокола. Пусть контроллер с адресом 1 хочет считать показание
датчика давления в котле. Он знает, что этот датчик подключен к бейсплейту
(узлу) с сетевым адресом 5, модулю AI в слоте 6, каналу (входу) 12. Адресная
часть настраивается (программно и перемычками (jumper) в процессе
конфигурирования ПТС проекта. В результате котроллер формирует запрос к
ведомому устройству (узлу ввода/вывода) следующего содержания: ___

Контроллер, получив ответ от ведомого устройства, сканирует поле “данные c датчика” и начинает математическую обработку.
|
|
|
Пример 2. Пусть после обработки данных с датчика контроллер решил, что надо открыть выпускной клапан на 50%. Клапан подключен к узлу ввода/вывода 7, модулю AO в слоте 3, каналу 2. Контроллер формирует команду следующего содержания:

Узел 7, прослушивая шину, натыкается на команду, адресованную ему. Он записывает значение уставки 50% в регистр, соответствующий слоту 3, каналу 2. Сразу же модуль АО формирует на выходе 2 нужный электрический сигнал и выдает его клапану на исполнение. Далее узел 7 высылает обратно контроллеру подтверждение успешного выполнения команды.

Контроллер получает ответ от узла 7 и считает, что команда выполнена. Это всего лишь упрощенная схема взаимодействия контроллера с узлами ввода/вывода. В реальных АСУ ТП, наряду с рассмотренными выше, используется множество диагностических, управляющих и сервисных сообщений. Тем не менее, принцип “запрос-ответ” (“команда-подтверждение”), реализованный в большинстве полевых протоколов, остается неизменным.
На рис. 12 представлена сетевая архитектура коммуникаций ПЛК. Устройства верхнего уровня (компьютеры, концентраторы) на своем уровне обмениваются большими объемами информации. Эта информация защищена механизмами подтверждений и повторов на уровне протоколов взаимодействия. Пересылаемый массив данных может быть доступен не только центральному устройству, но и другим узлам сети этого уровня. Это означает, что сеть является равноправной (одноранговой), т. е. определяется моделью взаимодействия peer-to-peer (равный с равным). Время доставки информации не является доминирующим требованием к этой сети (речь идет о жестком реальном времени).
Сети, обеспечивающие информационный обмен на этом уровне, называют информационными сетями. Наиболее ярким представителем сетей этого уровня является Ethernet с протоколом TCP/IP.
|
|
|
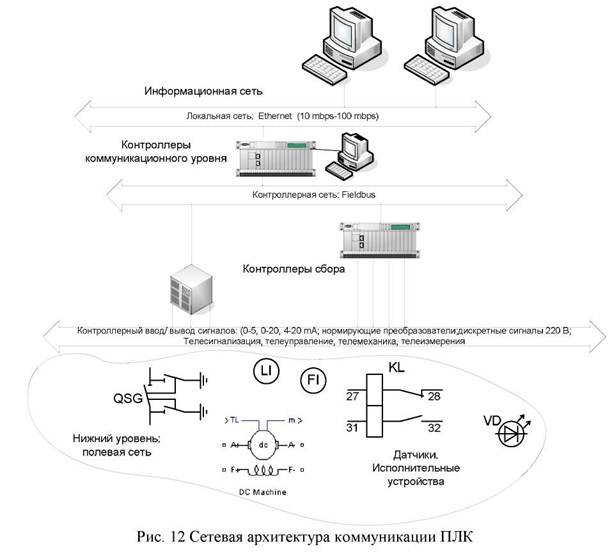
Сети, обеспечивающие информационные обмен между SCADA, контроллерами, датчиками и исполнительными устройствами, часто объединяются под общим названием - промышленные сети.
Их можно разделить на два уровня:
- коммуникационные промышленные сети, решающие задачи связи с
компьютерами SCADA системы;
- контроллерный ввод/ вывод сигналов, задачи которых сводятся к опросу
датчиков и управлению работой разнообразных исполнительных устройств.
Для обеспечения безошибочности и максимального удобства передачи информации коммуникационные операции регулируются набором правил и соглашений, называемых сетевым протоколом. Сетевой протокол определяет типы разъемов, кабелей, сигналы, форматы данных и способы проверки ошибок, а также алгоритмы для сетевых интерфейсов и узлов, предполагая стандартными в пределах сети принципы подготовки сообщений и их передачи.
На сегодняшний день спектр протоколов для обоих этих классов промышленных сетей (управляющие и полевые) довольно широк.
CAN, FIP, Profibus, MPI, ControlNet, DH+, Modbus, Modbus plus, Genius, DirectNet, DeviceNet, Interbus, SDS, ASI, HART, FF и еще несколько десятков протоколов присутствуют сегодня на рынке промышленных сетей. Каждая из сетей имеет свои особенности и области применения.
Протокол MODBUS можно назвать наиболее распространенным в мире. Для работы со своими устройствами его используют десятки фирм. Протокол привлекает простотой логики и независимостью от типа интерфейса (RS-232C, RS-422, RS-485 или же токовая петля 20 мА).
Протокол работает по принципу Master/Slave (ведущий-ведомый). Конфигурация на основе этого протокола предполагает наличие одного Master-узла и до 247 Slave-узлов. Только Master инициирует циклы обмена данными. Существует два типа запросов:
• запрос/ответ (адресуется только один из Slave-узлов);
• широковещательная передача (Master через выставление адреса 0 обращается ко всем остальным узлам сети одновременно).
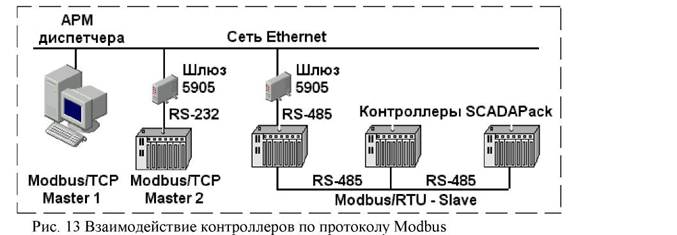
На рис. 13 приведен пример взаимодействия контроллеров SCADAPack/Slaves через интерфейс RS-485, используя стандартный протокол обмена Modbus. Для связи контроллеров SCADAPack с рабочей станцией через сеть Ethernet использован модуль/шлюз Ethernet 5905.
CANbus (Control Area Network) - это последовательная шина с децентрализованным доступом. Возможные коллизии, связанные с одновременным запросом шины, разрешаются на основе приоритетности передаваемых сообщений. В CAN каждый блок данных содержит дополнительный 11-битовый идентификатор, который определяет приоритет данного сообщения. Право на работу с шиной получит тот узел, который передает сообщение с наивысшим приоритетом.
|
|
|
По своим характеристикам протокол CAN удовлетворяет не только требованиям задач реального времени, но и реализует высокую степень обнаружения и исправления ошибок. В каждом сообщении может быть передано до 8 байт данных. Большие блоки можно передавать за счет использования принципа сегментации.
Протокол BITBUS разработан фирмой INTEL в 1984 году для построения распределенных систем, в которых требовалось обеспечить высокую
скорость передачи, детерминизм и надежность. Физический интерфейс основан на RS-485. Информационный обмен организован по принципу "запрос - ответ" (Master /Slave).
Протокол BITBUS определяет два режима передачи данных по шине:
Синхронный режим используется при необходимости работы на большой скорости, но на ограниченных расстояниях. В этом режиме к шине можно подключить до 28 узлов, но длина шины ограничиваться 30 м. Скорость может быть от 500 Кбод до 2,4 Мбод. Синхронный режим передачи предполагает использование двух пар проводов (одной пары - для данных, другой - для синхронизации).
Использование режима с самосинхронизацией позволяет значительно удлинить шину. Стандартом определены две скорости передачи: 375 Кбод (до 300м) и 62,5 Кбод (до 1200м). Используя повторители, можно объединять последовательно несколько шинных сегментов (до 28 узлов на сегмент). Тогда общее число узлов можно довести до 250, а длину общей шины - до нескольких километров. При этом режиме передачи также используются две пары проводников (одна для данных, другая для управления повторителем).
Протокол FIP (Factory Information Protocol) обеспечивает высокие скорости передачи и строго определенные интервалы обновления данных. Протокол имеет гибридный централизованный или децентрализованный контроль за шиной, основанный на принципе широкого вещания. Использование режима широкого вещания избавляет от необходимости присваивания каждому устройству уникального сетевого адреса.
|
|
|
Каждый узел на шине полностью автономен. Все узлы имеют возможность получать предназначенные для них данные. Контроль осуществляется со стороны центрального узла сети, называемого арбитром.
FIP протокол поддерживает уровни 1, 2 и 7 модели OSI. В качестве среды передачи используются витая пара или оптоволокно. Максимальная протяженность сети - 1000м без повторителей (до 15 км с оптическими повторителями) при скорости обмена 1 Мбит/с. Сеть поддерживает до 128 устройств.
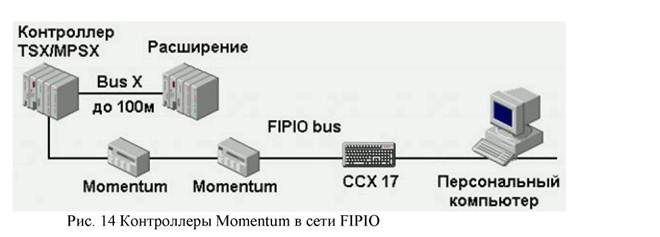
Контроллеры семейства Premium (Schneider Electric) используют разновидность сети FIP (FIPIO) (рис.14) для организации удаленного ввода/вывода. По этой сети к центральному процессору (через встроенный порт) могут быть подключены:
• удаленный ввод/вывод контроллеров Momentum;
• панель управления оператора CCX 17;
• персональные компьютеры и другие устройства.
Протокол PROFIBUS (PROcess FIeld BUS) разработан в Германии. Стандарт протокола описывает уровни 1, 2 и 7 OSI-модели. В PROFIBUS используется гибридный метод доступа Master/Slave и децентрализованная процедура передачи маркера. Сеть может состоять из 122 узлов, из которых 32 могут быть Master-узлами. Адрес 0 зарезервирован для режима широкого вещания. В среде Master-узлов по возрастающим номерам узлов передается маркер, который предоставляет право ведения циклов чтения/записи на шине. Все циклы строго регламентированы по времени, организована продуманная система тайм-аутов. Протокол хорошо разрешает разнообразные коллизии на шине. Настройка всех основных временных параметров идет по сценарию пользователя. Рабочая скорость передачи может быть выбрана в диапазоне 9,6-12 000 Кбит/с.
При построении многоуровневых систем автоматизации часто возникают задачи организации информационного обмена между уровнями. В одном случае необходим обмен комплексными сообщениями на средних скоростях. В другом - быстрый обмен короткими сообщениями с использованием упрощенного протокола обмена (уровень датчиков). В третьем требуется работа в опасных участках производства. Для всех этих случаев PROFIBUS имеет решение. Под общим названием понимается совокупность трех отдельных протоколов: PROFIBUS-FMS, PROFIBUS-DP и PROFIBUS-PA.
Протокол PROFIBUS-FMS появился первым и был предназначен для работы на так называемом цеховом уровне. Здесь требуется высокая степень функциональности, и этот критерий важнее критерия скорости. Основное его назначение - передача больших объемов данных.
В задачах управления, требующих реального времени, на первое место выдвигается такой параметр, как продолжительность цикла шины. Реализация протокола PROFIBUS-DP дает увеличение производительности шины (например, для передачи 512 бит данных, распределенных по 32 станциям, требуется всего 6 мс).

Рис. 15 Контроллеры Simatic S7 в сети Profibus-DP
Протокол PROFIBUS-DP поддерживается устройствами разных производителей. Для контроллеров компании Siemens этот протокол является основным (рис.15). Некоторые контроллеры этого бренда, в частности, S7-300 и S7-400 имеют встроенный порт PROFIBUS-DP, другие взаимодействуют с сетью посредством коммуникационных процессоров.
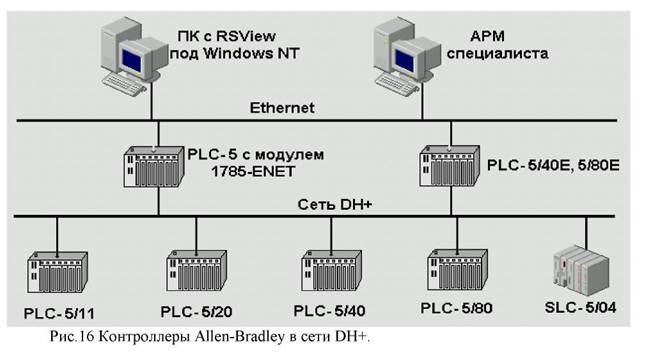
Сеть DH+ (Allen-Bradley) поддерживает передачу данных и удаленное программирование контроллеров в дополнение к одноранговой связи между другими процессорами и устройствами (рис.16). Магистральная линия сети DH+ может иметь протяженность до 3048м, ответвления – до 30м. К одной сети DH+ можно подключить до 64 устройств. Скорость передачи данных зависит от длины шины и может настраиваться от 57.6 Кбод (3048м) до 230.4 Кбод (750м).
Характеристика одноранговой связи:
отсутствие “мастера”;
минимальный сетевой трафик;
любой контроллер инициализирует связь с любым сетевым узлом;
простота наращивания контроллеров в сети.
Сеть Genius фирмы GE Fanuc предназначена для объединения в законченную систему контроллеров GE Fanuc серий 90-70 и 90-30, удаленной периферии Genius и Field Control (рис. 17). Взаимодействие различных устройств с сетью Genius осуществляется посредством контроллеров шины Genius (GBC), интерфейсных модулей (GCM), блоков интерфейса с шиной Genius (BUI). Физически устройства объединяются в сеть экранированной витой парой. Сеть имеет топологию "шина", к которой может быть подключено до 32 устройств. Максимальная длина шины составляет 2,3 км при скорости обмена 38,4 Кбод. Максимальная скорость передачи данных 153,6 Кбод достигается при длине линии до 600 м.
MPI является наиболее распространённым стандартом интерфейса обмена данными в параллельном программировании. Существуют его реализации для большого числа компьютерных платформ. Основным средством коммуникации между процессами в MPI является передача сообщений друг другу. Стандартизацией MPI занимается MPI Forum. В стандарте MPI описан интерфейс передачи сообщений, который должен поддерживаться как на платформе, так и в приложениях пользователя. В настоящее время существует большое количество бесплатных и коммерческих реализаций MPI. Существуют реализации для языков Фортран 77/90, Си и Си++.
Сеть Genius поддерживает передачу как глобальных данных (Global Data) так и дейтаграмм (при каждом акте сканирования).
Для обмена данными по Global Data каждому входящему в состав сети контроллеру выделяется участок адресного пространства. В этот участок он передает данные, указанные при конфигурировании его контроллера шины. Передача данных осуществляется без указания контроллера, который должен их получить. Этот участок доступен всем подключенным к шине PLC только для чтения. Таким образом, для всей сети создается единый набор данных, используемый для обмена. Один контроллер шины обеспечивает прием/передачу до 128 байт данных от каждого из узлов.

Рис. 17 Контроллеры фирмы GE Fanuc в сети Genius Дейтаграмма (Datagram) представляет собой направленную посылку данных от одного контроллера к другому. Прием/передача дейтаграмм происходит под управлением программы пользователя. Момент отправки дейтаграммы может быть задан с требуемой периодичностью или по наступлению какого-либо события. В КП рекомендуется использовать возможности протокол Modbus plus.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 1307; Нарушение авторских прав?; Мы поможем в написании вашей работы!