КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
САУ с идеальным реле и гибкой обратной связью
|
|
|
|
(Юревич, стр.214)
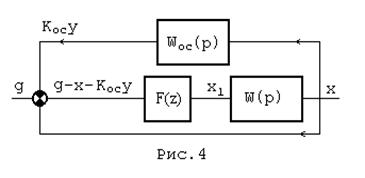
Структурная схема САУ представлена на рис.4.
Положим

Учтитывая, что для этого типа нелинейности справедливо равенство
F(-z)=-F(z).
можно записать уравнения, описывающие свободное движение системы (т.е. движение при g º 0):
Последнее равенство формально следует из соотношений

Система уравнений может быть представлена в виде
Поделив второе уравнение на первое, получим дифференциальное уравнение фазовых траекторий:
 .
.
Рассмотрим частный случай, когда F(z)=sign(z) – идеальное реле. Тогда изменение сигнала на выходе нелинейного звена с F(z)=1 на F(z)=-1 произойдет в момент когда изменит знак z, т.е. когда z=0. Следовательно, уравнение линии переключения x+Kосy=0.
Такая линия переключения обеспечивает изменение знака ускорения до достижения координаты x=0, то есть с упреждением. Сказанное иллюстрируется графиками свободного движения САУ и ее фазовым портретом при отсутствии гибкой обратной связи (Рис.5a и 5b) и при наличии гибкой обратной связи с Kос=0.002 (Рис.5с и 5d). Остальные параметры САУ: T=0.2с, K=100, c=10. Начальные условия: gº0, x(0)=3, dx/xt½t=0=0.
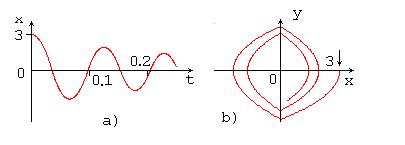
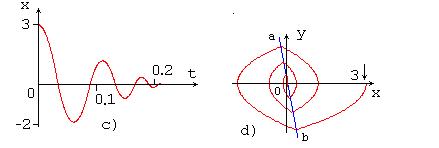
На рис.5 ab - линия переключения. Как видно из сравнения рисунков b) и d) введение гибкой отрицательной обратной связи приводит
- к более раннему переключению и, вследствие, этого к уменьшению времени переходного процесса;
- к постепенному уменьшению угла между линией переключения и касательной к фазовой траектории так, что в после нескольких циклов переключения фазовая траектория сливается с линией переключения и наступает так называемый скользящий режим (Юревич, стр. 217), когда изображающая точка движется к началу координат вдоль линии переключения, совершая около нее малые колебания с большой частотой (практически - по прямой).
|
|
|
Координата y, при которой наступает скользящий режим может быть определена для данного случая из следующих соображений.
Уравнение линии переключения x+Kос×y=0, откуда
 .
.
После пересечения отображающей точкой линии переключения (движение по часовой стрелке) функция
F(x+Kос×y)=+1 при y>0,
F(x+Kос×y)=-1 при у<0.
Тогда приравнивая в верхней полуплоскости
 .
.
Откуда
 ,
,
x=-Kос×y.
Размерность [K]=c-1,[Kос]=с, [T]=с, [y]=с-1, что соответствует размерности скорости изменения безразмерной величины x. При T=Kос в системе при любых начальных условиях сразу возникает скользящий режим (модель 1.mcd).
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 613; Нарушение авторских прав?; Мы поможем в написании вашей работы!