КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Уравнения и передаточные функции элементов и систем автоматического управления. Типовые возмущающие функции
Функциональная схема системы автоматического регулирования
Классификация систем автоматического управления
Задачей системы автоматического управления является формирование и выдача на объект воздействий, обеспечивающих требуемое течение технологического процесса. В зависимости от вида получаемой информации об управляемых или о возмущающих величинах автоматические системы подразделяются на классы:
- замкнутые (принцип Ползунова- Уатта, по отклонению);
- разомкнутые (принцип Понселе, по возмущению);
- комбинированные (по замкнуто-разомкнутому циклу).
В системах замкнутого цикла используется информация об управляющих величинах y(t). Они сравниваются с заданиями g(t), т.е. преобразуются в отклонения ε(t) = g(t) – y(t), а затем на основании отклонений ε(t) регулятор вырабатывает регулирующее воздействие u(t) – реализуется принцип управления по отклонению. По виду задания, поступающего с задатчика, различают системы стабилизации, следящие и программного управления. В системах стабилизации задание постоянно, т.е. g(t)=const. В следящих оно изменяется в определенных пределах по неизвестному заранее закону. Задание в системах программного управления изменяется во времени по определенной программе. Основной недостаток управления по принципу отклонения это то, что возмущающее воздействие, поступающее на объект, подавляется только после того, как оно вызовет ответную реакцию объекта.
|
|
|

|
|











 ОС
ОС
Рис. 4. Блок-схема САР по отклонению
Регулирование по возмущению или по компенсации - разомкнутый цикл - основано на том, что из совокупности возмущений f(t), действующих в системе, выбивается одно, главное, на которое реагирует САР. При этом компенсируется влияние на регулируемый параметр y(t) только основного возмущающего воздействия и регулирующее воздействие u(t) формируется в САР согласно результатам главного возмущающего фактора, действующего на объект. От замкнутого цикла отличается отсутствием обратной связи.

 f (t)
f (t)


g(t)
|
|





Рис. 5. Блок-схема САР по возмущению (компенсации)
Достоинство этого принципа в том, что влияние возмущающего воздействия f(t) может быть устранено до того, как произойдет отклонение регулируемого параметра, вследствие воздействия регулятора на объект. Регулируемый параметр y(t) на выходе объекта не связан со входом регулятора. Регулирующее воздействие не зависит ни от протекания (хода) процесса в объекте, ни от регулируемого параметра, а формируется лишь возмущающим воздействием и законом управления по возмущению. Недостатком систем разомкнутого цикла является невозможность корректировки управляющего воздействия при нежелательном изменении управляемой величины под действием возмущений.
Пример схемы регулирования температуры в термокамере по принципу компенсации приведен на рис. 6.
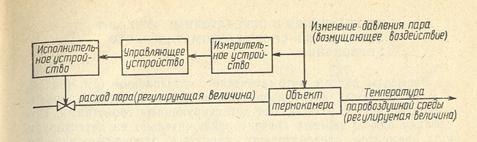
Рис. 6. Схема регулирования температуры в термокамере по принципу компенсации.
Комбинированный (замкнуто-разомкнутый) принцип регулирования по отклонению и по возмущению сочетает достоинства и недостатки указанных выше принципов. В комбинированной САР воздействие по нагрузке f(t) обеспечивает немедленное формирование регулирующего воздействия u(t) согласно изменениям нагрузки (контур I) и по отклонению (контур II), для устранения погрешностей, возникающих в результате неточности регулирования по нагрузке.
I f (t)
|
|
|
|
|

II ОС
Рис. 7. Блок-схема комбинированной САР
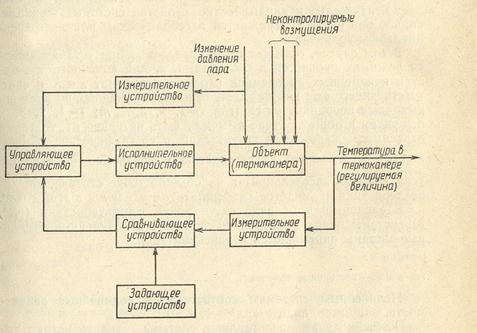
Рис. 8. Пример схемы комбинированной системы автоматического регулирования температуры в термокамере.
Среди различных автоматических систем наибольшее распространение получили САР, в которых реализован принцип регулирования по отклонению. Поэтому рассмотрим типовые элементы этих систем. Для пояснения принципа действия автоматических систем применяют функциональные схемы или блок-схемы. Функциональные блоки представляют собой конструктивно обособленные части (элементы или устройства) автоматических систем, выполняющих определенные функции. Связи между функциональными блоками обозначаются линиями со стрелками, которые указывают направление воздействия.
Система автоматического регулирования (САР) состоит из объекта регулирования (ОР), регулятора (Р), исполнительного механизма (ИМ), регулирующего органа (РО), задающего устройства (задатчика), сумматора (С), измерительного устройства (датчика), состоящего из чувствительного элемента (ЧЭ), усилителя-преобразователя сигналов измерительной информации (Ус), а также линий связи, соединяющих эти устройства.
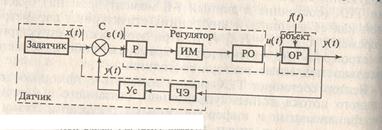
Рис. 9. Блок-схема системы автоматического регулирования
Регулятор – автоматическое устройство, реагирующее на отклонения регулируемого параметра от заданного значения и изменяющее приток вещества или энергии (например, пара, горячей воды и т.п.) в объект для поддержания равновесного состояния. Управляющее устройство регулятора воспринимает воздействия от измерительного устройства, сравнивает его с воздействием от задающего элемента (задатчика) в сумматоре (С) и вырабатывает сигнал (рассогласование), пропорциональный заданному значению регулируемого параметра. Управляющее устройство (регулятор) усиливает полученную разность (рассогласование) через усилитель и с помощью исполнительного механизма управляет подачей вещества или энергии.
Исполнительный механизм (ИМ) предназначен для перемещения регулирующего органа (РО) под воздействием сигнала рассогласования, полученного от управляющего устройства.
Регулирующий орган служит для воздействия на объект регулирования (ОР) посредством увеличения или уменьшения подачи вещества или энергии в реализуемый объект.
Измерительное устройство воспринимает измерение регулирующего параметра с помощью чувствительного элемента (ЧЭ), преобразует и усиливает полученное сформированное воздействие при помощи усилителя-преобразователя (Ус) для управления элементами регулятора.
По структуре регулятора системы автоматического регулирования подразделяются на системы прямого и непрямого регулирования. Если сигнал от ЧЭ непосредственно, без усилителя мощности воздействует на регулирующий орган, то регулятор является регулятором прямого действия и система называется системой прямого регулирования.
Если выходной сигнал с измерительного устройства усиливается одним или несколькими усилителями мощности, регулятор называется регулятором непрямого действия, а система – системой непрямого регулирования.
Если в системе одна регулируемая выходная величина, то САР называется одномерной. Если в системе несколько регулируемых величин, то САР называется многомерной, т.е. система имеет несколько выходов. Многомерные САР подразделяются на системы несвязанного и связанного регулирования. Системами несвязанного регулирования называют такие, в которых регуляторы не связаны друг с другом и могут взаимодействовать лишь через общий для них ОР. Системами связанного регулирования называют такие системы, в которых регуляторы различных регулируемых величин имеют друг с другом взаимные связи, осуществляющие взаимодействие между ними вне объекта регулирования. Систему связанного регулирования называют автономной, если изменение одной из регулируемых величин в процессе регулирования не вызывает изменения других.
Всякая САР согласно самому принципу ее действия всегда имеет, по крайней мере, одну обратную связь, подающую сигнал с выхода на вход для сравнения действительного и требуемого значения регулируемой величины. Такая обратная связь называется главной. САР помимо главных обратных связей, число которых равно числу регулируемых величин, могут иметь еще вспомогательные или местные обратные связи. Системы, имеющие только одну главную обратную связь, называются одноконтурными. В одноконтурных системах воздействие, приложенное в каком-либо месте, обязательно проходит через все элементы основного контура регулирования. Системы, имеющие помимо главной обратной связи одну или несколько местных обратных связей, называются многоконтурными.
В зависимости от вида уравнений, которыми описывается статика и динамика системы регулирования, системы бывают линейными и нелинейными. Наиболее полно разработана теория линейных систем. Поэтому там, где это возможно, расчет нелинейных систем стараются привести к расчеты линейных систем, линеаризуя для этой цели нелинейные участки цепи регулирования.
На САР действуют внешние факторы- возмущения f(t) которые стремятся вывести ее из равновесного состояния. Возмущения могут быть близкие к ступенчатым, импульсным, гармоническим, а также стохастические, «белый шум».
Целью САР является поддержание постоянной величины (параметра), характеризующей процесс или изменение ее по заданному закону (алгоритму), при котором регулируемая величина мало отличается от заданного значения.
Элементы систем автоматического регулирования являются преобразователями сигналов однонаправленного действия – детектирующими элементами. Это позволяет различать сигналы входные и выходные, связь между которыми определяет статические и динамические свойства системы. Функционально она обычно выражается алгебраическим или дифференциальным уравнением. Если эта связь определена при установившихся режимах процессов в системах, то эта зависимость называется статической, а ее графическое изображение статической характеристикой. Признаком статического режима работы является сохранение постоянного во времени значения выходного сигнала: y(t) = const. У многих промышленных объектов в статическом режиме каждому значению выходного сигнала на входе соответствует определенное значение выходного сигнала: y = f (x). Такие объекты называют статическими, а приведенную зависимость – их статической характеристикой.
Значение dy/dx (тангенс угла наклона касательной) в какой-либо точке статической характеристики называется коэффициентом усиления в этой точке. В зависимости от вида статической характеристики системы подразделяют на линейные и нелинейные. Линейные системы описываются уравнением вида y=ax + b, где a и b – постоянные величины. (рис. 10).
Нелинейным системам соответствуют нелинейные зависимости, например вида y=ax2 + b, x>0. Особый случай представляют системы, характеристики которых параллельны ординате – астатические системы.
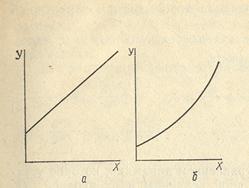
Рис. 10. Статические характеристики: а – линейная; б – нелинейная.
Для характеристики систем автоматического регулирования важно знать не только связь между выходными и входными сигналами в установившемся режиме, но и их зависимость в неустановившемся режиме, называемом динамическим. Такой режим описывается дифференциальными, интегральными или интегрально-дифференциальными уравнениями.
Любая САР состоит из 2-х основных элементов: объекта регулирования (ОР) и регулятора. Основными свойствами объектов регулирования являются емкость объекта, самовыравнивание, время разгона объекта и запаздывания.
Емкость объекта – способность объекта аккумулировать вещество или энергию.
Самовыравнивание – свойство ОР после внесения возмущения (например, нарушение равновесия между притоком и расходом вещества) самостоятельно, без участия человека или регулятора, переходить в новое равновесное состояние. Самовыравнивание облегчает функционирование регулятора. Объекты регулирования, обладающие свойством самовыравнивания, называются статическими, а не обладающие этим свойством – астатическими.
В установившемся режиме, при определенной подаче топлива, давление пара в барабане котла Ро. При увеличении топлива оно увеличилось и стало равным Р1, т.е. снова достигнут установившийся режим, но на другом уровне. Это новое положение равновесия может быть достигнуто без регулятора.
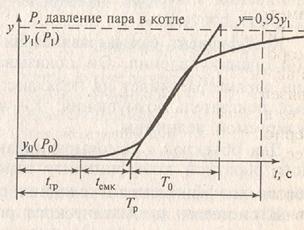
Рис. 11. Кривая разгона статического объекта – давления пара в барабане котла
Примером объекта без самовыравнивания может служить уровень воды в барабане котла. При резком увеличении подачи питательной воды в барабан котла ее вровень (Н) в барабане возрастает. Расход пара из котла останется прежним, а приток воды продолжается, поэтому уровень Н растет.
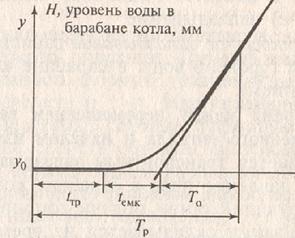
Рис. 12. Кривая разгона астатического объекта - уровня воды в барабане котла
Для астатического объекта устойчивое функционирование системы без регулятора невозможно.
Мерой емкости объекта без самовыравнивание является время разгона объекта Тр, под которым понимается время, в течение которого значение регулируемого параметра изменится от нуля до нормального при наибольшем дисбалансе между притоком и расходом среды. Величина, обратная времени разгона, пропорциональна скорости разгона объекта: ε= 1/Тр(1/с).
Мерой емкости объекта с самовыравниванием является постоянная времени разгона То (рис.11) – это время, в течение которого регулируемый параметр изменяется с постоянной скоростью от минимального до максимального значения. Для объекта без самовыравнивания Тр и То могут совпадать (при ступенчатом воздействии).
Коэффициент самовыравнивания (ρ) служит для количественной оценки явления. Он показывает, в какой степени отклонение параметра влияет на небаланс: ρ = У/Х, где Х –количественный показатель возмущения, У – количественный показатель регулируемой величины. Для объектов с самовыравниванием чаще пользуются величиной, обратной коэффициенту самовыравнивания – коэффициентом усиления объекта Кр, где Кр= 1/ ρ.
В САР после получения возмущающего воздействия (скачкообразно нарушен приток или расход) регулируемый параметр изменяется не мгновенно, а через некоторое время. Это время называется запаздыванием процесса в объекте τ. Различают емкостное и транспортное (передаточное) запаздывание. Емкостное запаздывание (tемк) зависит от емкости объекта регулирования. Транспортное запаздывание (tтр) – это время между перемещением регулируемого органа в результате полученного сигнала и началом изменения регулируемого параметра, т.е. время запаздывания складывается из времени сжигания топлива, передачи теплоты экранным трубам, парообразования в них, подъема пара в паровую часть барабана котла. Чем больше τ, тем труднее регулировать процесс. Наибольшим запаздыванием обладают объекты, в которых регулируется температура, а наименьшим – объекты, в которых поддерживается нагрузка.
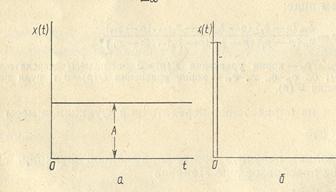
Типовые воздействия и режимы в системах управления. САУ представляет собой совокупность устройств, оказывающих одно на другое направленные действия. Каждый элемент таких систем можно рассматривать как преобразователь, обладающий способностью передавать физические воздействия и информационные сигналы в одном, строго определенном направлении. Экспериментальные и теоретические исследования САУ существенно упрощаются при типизации воздействий и сигналов. В теории и практике автоматизации используются в основном следующие типовые воздействия: ступенчатое, импульсное и гармоническое. Ступенчатое воздействие - это воздействие, которое мгновенно возрастает от нуля до некоторого значения и далее остается постоянным. Если амплитуда такого воздействия равна единице, то его называют единичным ступенчатым воздействием и обозначают 1 (t). Ступенчатые воздействия наиболее близки к реальным задающим и возмущающим воздействиям, характерным для систем стабилизации. Импульсное воздействие представляет собой одиночный импульс прямоугольной формы, имеющий значительную амплитуду и весьма малую по сравнению с инерционностью исследуемой системы продолжительность (Рис.13). [Справочно. При математическом анализе САУ импульсное воздействие описывают дельта-функцией δ(t) [0 + ], которую можно рассматривать как импульс, имеющий неограниченно большую высоту, исчезающе малую длительность и единичную площадь.] Гармоническое воздействие, т. е. воздействие синусоидальной формы, широко используется при исследовании САУ различных типов. Это обусловлено тем, что частотные методы анализа и синтеза САУ хорошо разработаны, а реальные возмущения, часто имеющие периодический характер, могут быть представлены гармоническими функциями.
 t
t
Рис. 13. Типовые возмущающие функции: а – ступенчатая, б – импульсная.
Типовые воздействия позволяют исследовать неустановившиеся, установившиеся и статические режимы работы САУ и их элементов. Неустановившийся (переходный) режим является реакцией системы на вновь появившееся воздействие. Характер переходного процесса зависит от типа воздействия и собственных свойств системы. Установившийся (вынужденный) режим - это режим, в котором выходная величина элемента или системы изменяется по закону, определяемому входным воздействием. Установившийся или статический режим имеет место после окончания переходного процесса.
Линеаризация характеристик. Нелинейные характеристики САУ и их элементов во многих случаях можно линеаризовать, т. е. приближенно заменить более простыми линейными характеристиками. Возможность такой замены обусловлена относительно небольшими отклонениями в оглаженном производстве режимных параметров от их регламентированных значений.
Геометрически линеаризация нелинейной зависимости у = f(x) означает ее замену отрезком касательной в точке, соответствующей заданному режиму. Линеаризованную характеристику удобно рассматривать в отклонениях Δу и Δх переменных у и х от их заданных значений у0 и х 0.
у-у0 = (ду/дх)х-хо(х-х0) или Δу=К Δх.
Коэффициент передачи К характеризует передаточные свойства элемента (системы) в статике. Размерность К равна отношению размерности выходной величины к размерности входной величины.
Динамические характеристики линейных элементов и систем, определяющие зависимость выходной переменной от входной в неустановившемся режиме, представляют дифференциальными уравнениями, передаточными функциями, частотными и временными характеристиками. Динамические характеристики содержат информацию об инерционных свойствах объекта. Эта информация необходима для синтеза САУ и настройки регулятора. Для перехода от дифференциального уравнения к статической характеристике достаточно приравнять все производные по времени нулю.
Передаточную функцию получают в результате применения интегрального преобразования Лапласа к уравнению динамики. Входная x(t) и выходная y(t) переменные как функции времени преобразуются в функции Х (р) и Х (р)комплексного аргумента. Х (р) и Y (p) называются изображениями x(t) и y(t), а x(t) и y(t) – оригиналами Х (р) и Y (p). Отношение изображения выходной величины к изображению входной величины называют передаточной функцией: Y (р) / Х (р) = Q (p)/P(p) = W(p). При р = 0 передаточная функция превращается в коэффициент усиления: W(о)= К.
Различают передаточные функции W(p) в операторной форме, а также в форме изображений Лапласа. Передаточной функцией в операторной форме называют отношение оператора воздействия к собственному оператору, а передаточной функцией в форме изображений Лапласа - отношение изображения выходной координаты к изображению входной величины при нулевых начальных условиях. Передаточные функции в форме изображений Лапласа и в операторной форме при принятых обозначениях совпадают. Сходство между этими передаточными функциями чисто внешнее и имеет место для случая стационарных систем.
При выборе регулятора, параметров его настройки, закона регулирования и анализе качества регулирования с учетом статических и динамических характеристик объекта используют математические модели (ММ), характеризующие объект (систему) регулирования, в которых используют символьные и иконографические формы математического описания. Символьные модели представляют собой совокупность формул, уравнений, операторов, логических условий, неравенств и т.п. Иконографические модели – это графы, структурные схемы, которые формируют наглядное графическое отображение свойств объекта (системы). Сочетание символьного и иконографического описаний наиболее полно характеризует ММ объекта (системы) управления.
Свойства большинства систем управления технологическими процессами (ТП) в пищевой промышленности изменяются относительно медленно, что позволяет использовать для их описания линейные дифференциальные уравнения с постоянными коэффициентами. Уравнения этого типа в теории автоматического управления (ТАУ) обычно записывают в символьной (операторной) стандартной форме, при этом все члены, содержащие выходную координату, группируют в левой части, члены с входными переменными – в правой части уравнения. Переход от обычной формы дифференциального уравнения к символьной состоит в замене символа дифференциального уравнения оператором р = d/dt. При переходе к стандартной форме записи уравнение преобразуют таким образом, чтобы коэффициент выходной величины был равен единице. В этом случае коэффициент перед входной величиной будет равен коэффициенту передачи, а коэффициенты при производных имеют размерность времени в степени, равной порядку соответствующей производной. Рассмотрим пример преобразования линейного дифференциального уравнения второго порядка.
a2d2y(t)/dt2 + a1dy(t)/dt + a0y(t) = b1dx(t)/dt + b0x(t).
Используя оператор дифференцирования р = d/dt запишем уравнение в операторной форме:
(a2p2 + a1p + ao)y(t) = (b1p + b0)x(t).
При преобразовании дифференциальных уравнений, записанных в символьной форе, оператор р можно рассматривать как алгебраический сомножитель, а выражение p y как произведение. Поэтому уравнение в стандартной форме запишем как
(Т22р2 + Т1р + 1)y(t) = K (τp +1) + x(t), где Т22 = a2/a0; T1 = a1/a0; τ = b1/b, постоянные, T2, T1, τ имеют размерность времени и называются постоянными времени; они характеризуют динамические свойства элементов объекта (системы); К – коэффициент передачи.
В теории автоматического управления под р понимают оператор связи между функциями входных и выходных сигналов объектов управления, систем управления или их элементов. В статических режимах оператор связи вырождается в функцию. Вид оператора без конкретизации значений коэффициентов, входящих в них, определяет структуру математической модели. Обозначить оператор системы – значит установить правило определения выходного сигнала этой системы по ее входному сигналу.
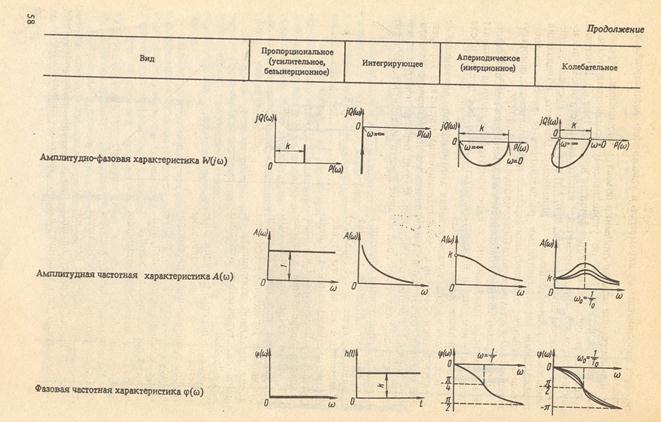
Частотные характеристики. Методы анализа и синтеза САУ, основанные на использовании частотных характеристик широко применяют в инженерной практике. Частотные характеристики получают при рассмотрении вынужденных движений элемента (системы) и подаче на его вход гармонического воздействия. После окончания переходного процесса выходная величина устойчивого элемента также будет изменяться по гармоническому закону, но с другими амплитудой и фазой. Отношение амплитуд выходной и входной величин равно модулю А(ω), а сдвиг фазы φ(ω) равен аргументу частотной передаточной функции (комплексного коэффициента передачи W (jω). Комплексный коэффициент передачи можно получить из передаточной функции заменой р на jω. Зависимости А(ω) = |W (jω)| и φ(ω) = arg W(jω) от частоты называются соответственно амплитудной частотной характеристикой (АЧХ) и фазовой частотной характеристикой (ФЧХ). Кривую, которую описывает конец вектора W(jω) при изменении частоты от 0 до ∞, называют амплитудно-фазовой характеристикой (АФХ).
Временные характеристики. Для описания линейных стационарных и нестационарных систем применяют переходные h(t) и импульсные переходные (весовые) W(t) характеристики. h(t) - это реакция системы на единичное ступенчатое воздействие, a W(t) - на единичное импульсное воздействие при нулевых начальных условиях.
Временные характеристики можно получить экспериментально, моделированием или решением дифференциального уравнения объекта (системы). W(t) может быть получено и дифференцированием h(t) по времени.
Случайные воздействия и процессы. Типовые воздействия являются определенными (детерминированными) функциями времени. Состояние технологического процесса при детерминированном воздействии может быть точно предсказано для любого момента времени.
Случайное воздействие является случайной функцией времени, т. е. функцией, не имеющей информационной определенности, достаточной для точного предсказания ее будущих значений по результатам текущих измерений. Конкретная реализация случайного воздействия может быть определена только в ходе эксперимента. Совокупность возможных реализаций случайной функции [х1(t),..., xn(t)] называется случайным процессом X(t). Для каждого фиксированного момента времени (сечения процесса) значение случайной функции называется случайной величиной.
Расчет САУ при случайных воздействиях можно проводить методами, которые используются при детерминированных воздействиях, если исходить из самого неблагоприятного случая экстремально возможного возмущения. Однако такой подход завышает требования к системе, поскольку экстремальная ситуация бывает редко. Обычно структуру САУ и параметры настройки выбирают на основе статистических методов, исходя из наиболее вероятного возмущения, что упрощает техническую реализацию системы. При этом, естественно, допускается ухудшение качества работы системы для указанных выше маловероятных ситуаций.
Статистические методы позволяют выявить закономерности, присущие случайным процессам массового характера. В практике исследования САУ широко используются следующие числовые характеристики случайного процесса X(t): математическое ожидание mx(t), д исперсия Dx(t), среднеквадратическое отклонение σ x(t), корреляционная функция Rxx(t1,t2).
Математическое ожидание случайного процесса - это среднее значение случайного процесса по множеству реализаций (среднее статистическое). Отклонение случайного процесса X(t) от его среднего значения mx(t) называют центрированным случайным процессом:
X(t) = X(t)-mx(t].
Дисперсия случайного процесса равна математическому ожиданию квадрата центрированного случайного процесса.
Среднеквадратическое отклонение σ x(t)=√ Dx(t) определяет средний уровень флуктуации случайного процесса относительно математического ожидания. Размерность σ x(t) совпадает с размерностью самой случайной величины.
Корреляционная функция позволяет учесть связь между значениями случайного процесса в различные моменты времени.
1. 5. Элементарные типовые динамические звенья. Передаточные функции соединений звеньев.
Разработку системы управления начинают с построения математической модели объекта управления. ММ является основой для выбора структуры, алгоритма управления и параметров настройки системы управления. ММ любой части системы обозначают звеном. Графическое изображение ММ в виде звеньев, соединенных между собой связями (линиями со стрелками) в ТАУ называется структурной схемой. Звено изображают в виде прямоугольника, в контур которого вписывают оператор, отражающий динамику преобразования входного сигнала в выходной, в форме передаточной функции W(p). Обозначения входных, промежуточных и выходных переменных и управляющих воздействий записывают над линией или с правой стороны линии, показывающей место приложения соответствующего сигнала. Промежуточные переменные – это координаты, связывающие отдельные звенья структурной схемы. Суммирующие элементы (сумматоры) изображают в форме круга, разделенного на секторы.
Математическое описание элементов системы автоматического управления (САУ) различного принципа действия, конструктивного исполнения и функционального назначения можно осуществить с помощью ограниченного числа элементарных звеньев. Элементарные звенья – это простые множители, входящие в состав передаточной функции или ее части.
Часть системы регулирования, которая описывается дифференциальным уравнением не выше второго порядка, называется типовым звеном. К типовым звеньям относят устойчивые элементарные звенья.
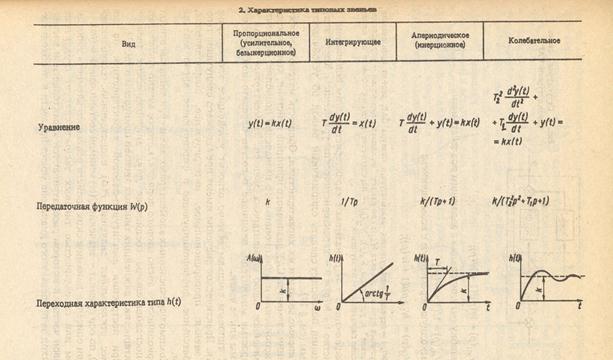
Рассмотрим шесть видов звеньев, из которых чаще всего состоят системы уравнения.
1. Статическое звено 0-ого порядка – усилительное.
Дифференциальное уравнение у(t)=k x (t)
 h
h

 R
R
Переходная функция




 0 t
0 t
Передаточная функция W(p)=k
2. Статическое звено 1-ого порядка – апериодическое.
Дифференциальное уравнение Т (t)+у(t)=k x (t)
(t)+у(t)=k x (t)
|
 h
h



 K
K


 Переходная функция
Переходная функция
 |
Передаточная функция W(p)=
3. Статическое звено 2-ого порядка.
Дифференциальное уравнение 
 ,
,
где Тк и Тд – постоянные времени Тк-колебательная, Тд-демпфирующая.
Корни соответствующего характеристического уравнения  имеют вид
имеют вид  .
.
При: 1) Тд/Тк≥2 – корни действительные;
2) Тд/Тк <2 – корни комплексные.
В первом случае характеристическое уравнение удобно переписать в виде:
Т1Т2р2+(Т1+Т2)р+1=0, р1= - ; р2= -
; р2= - .
.
Таким образом, имеем апериодическое звено 2-ого порядка с передаточной функцией
Во втором случае звено называется колебательным, его передаточная функция

4. Интегрирующее звено
Дифференциальное уравнение у(t)= или
или  , где Ти – постоянная времени, Ки=
, где Ти – постоянная времени, Ки= - коэффициент усиления.
- коэффициент усиления.
 |
 Переходная функция h
Переходная функция h
 arctg
arctg
 |
t
Передаточная функция
5. Дифференцирующее звено.
Уравнение идеального дифференцирующего звена у(t)=к не может быть реализовано, так как оно является уравнением дельта-функции, то есть импульса бесконечно малой длительности и бесконечно большой амплитуды.
не может быть реализовано, так как оно является уравнением дельта-функции, то есть импульса бесконечно малой длительности и бесконечно большой амплитуды.
Реальное дифференцирующее звено описывается уравнением

и передаточной функцией 

 h
h 






 Переходная функция
Переходная функция
t
0 Т
Здесь после установления постоянного значения входного сигнала х(t)=1(t) уменьшение выходной координаты происходит постепенно и зависит от величины Т.
6. Звено чистого запаздывания.
Уравнение звена у(t)=х(t-τ),
где τ – запаздывание выходного сигнала по отношению к входному – см. переходную функцию звена.


 х
х
 |



 h
h



 t
t
0 τ t
Передаточная функция W(р)=е-рτ
В таблице приведена характеристика наиболее е часто встречающихся типовых звеньев.
Звено запаздывания y(t)=x(t - τ), где τ – время запаздывания. W(p) = e-pτ
В качестве примера изображения системы автоматического регулирования в виде комбинации типовых элементарных динамических звеньев рассмотрим систему регулирования температуры в термокамере.
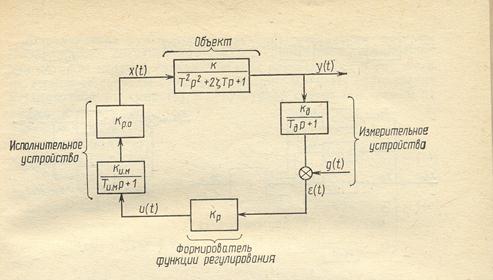
Рис.14. Структурная схема системы регулирования температуры в термокамере.
Объект регулирования – термокамера – представлена апериодическим звеном второго порядка с передаточной функцией К/(Т2р2 + 2ζТр + 1); датчик температуры – апериодическим звеном первого порядка Кд/(Тдр + 1); сигнал рассогласования ε образуется на элементе сравнения; функция закона регулирования формируется на усилительном звене Кр; исполнит ельный механизм представлен апериодическим звеном Ким/ (Тимр + 1), рабочий орган – усилительным – Кро.
К типовым звеньям относят последовательное, параллельное и параллельно-встречное (с обратной связью) соединения звеньев.
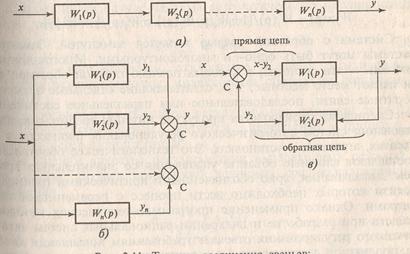
Рис.15. Типовые соединения звеньев: а) последовательное; б) параллельное; в)параллельно-встречное
Последовательно соединенные звенья можно заменить одним звеном с передаточной функцией W(p), равной произведению передаточных функций отдельных звеньев:
W(p) = W1(p), …, Wn(p)= ∏ Wi(p).
Передаточная функция W(p) параллельно включенных звеньев равна их сумме:
W(p) = W1(p) +, …, + Wn(p) = ∑ Wi (p).
В соединениях обратной связью различают прямую и обратную цепи. Прямая цепь – участок по ходу передачи сигнала от входа в выходу, т.е. от Х к Y. Обратная цепь – участок по ходу передачи сигнала от Y к Х. В схеме (рис.15, в) W1(p) прямая, а W2(p) – обратная цепь. Произведение передаточных функций прямой и обратной цепей образует передаточную функцию разомкнутой цепи:
W(p) = W1(p) W2(p).
Обратная связь положительная, если выходной сигнал Y усиливает входной Х и отрицательная, если Y ослабляет Х.
Передаточная функция системы с отрицательной обратной связью:
Wyx(p) = W1(p)/[1 + W1(p)W2(p)] = W1(p)/[1 + W(p)].
Системы с обратной связью являются замкнутыми. Замкнутые системы могут быть одно- и многоконтурные. Многоконтурные – системы, в которых помимо главной обратной связи есть местные, т.е. охватывающие отдельные элементы обратные связи, последовательное или параллельное соединения.
В пищевой промышленности широко распространены одноконтурные замкнутые САР по отклонению (с обратной связью).
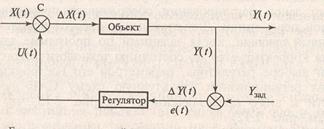
Рис.16. Блок-схема замкнутой автоматической системы регулирования по отклонению: X(t) - входное воздействие; Y(t) - регулируемая величина; Yзад- заданная величина; ∆Y(t) - отклонение регулируемой величины от заданного значения; U(t) - регулирующее воздействие.
|
|
Дата добавления: 2014-01-06; Просмотров: 4713; Нарушение авторских прав?; Мы поможем в написании вашей работы!