КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Связанные с телом оси, при вращении относительно которых динамические реакции опор равны статическим, называются свободными осями
|
|
|
|
Теоретическое исследование показывает, что в любом теле произвольной формы существуют три взаимно перпендикулярные оси, проходящие через центр масс тела, которые могут служить свободными осями вращения. Их называют главными осями инерции.

|
Для тел правильной формы эти оси находятся легко. Для прямоугольного параллелепипеда (папиросной коробки) главные оси инерции — это оси, проходящие через центры противоположных граней (рис. 3). Для однородных тел вращения главные оси инерции представляют собой оси геометрической симметрии. Для эллипсоида вращения свободными осями будут большая и малая оси и ось, перпендикулярная к ним..
рис. № 3 Главные оси вращения параллелепипеда.
Тело, вращающееся вокруг свободной оси, в отсутствие момента внешних сил относительно центра тяжести должно вращаться неограниченно долго, сохраняя неизменным положение оси. Однако создать вращение точно вокруг главной оси практически не удается, так как центр масс оказывается, хотя и ненамного, смещенным относительно оси вращения. При больших скоростях вращения даже небольшое смещение может создать значительные динамические нагрузки.
Поэтому существенным является вопрос об устойчивости вращения вокруг главных осей, т. е. вопрос о том, будет ли возникшее малое уклонение от вращения вокруг свободной оси в дальнейшем возрастать или тело будет стремиться под действием возникших динамических реакций вернуться к вращению вокруг главной оси. Устойчивость того или другого конкретного вида движения — сложнейший вопрос механики, для поисков ответа на который пока еще не существует единого метода.
В теоретической механике показано, что в отсутствие внешних сил устойчиво вращение относительно главных осей, соответствующих наибольшему и наименьшему моментам инерции тела. Вращение вокруг главной оси, соответствующей среднему моменту инерции, неустойчиво.
|
|
|
|
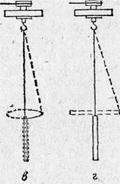
Устойчивость вращения вокруг главных осей инерции можно продемонстрировать, вращая различные тела с помощью центробежной машины (рис. 104).
|
рис. № 4 Вращение вокруг главных осей инерции.
Подвешенная за один из концов палочка при малых скоростях вращается в вертикальном положении (рис.4, г), т. е. вокруг оси с наименьшим моментом инерции. При возрастании скорости палочка вопреки действию силы тяжести располагается горизонтально и устойчиво вращается вокруг оси с наибольшим моментом инерции.
Вообще, практически оказывается, что вращение устойчиво вокруг оси с наибольшим моментом инерции. Это связано с влиянием внешних сил, в частности сил трения, которые создают момент относительно центра тяжести. Действие этого момента в случае вращения вокруг оси с наибольшим моментом инерции оказывается меньшим.
Ось с наименьшим моментом инерции интересна тем, что относительно нее легче всего создать вращение.
Падающая кошка, например, как известно, из любого положения встает на лапки. Для этого кошка в воздухе вращает хвостом и лапками так, чтобы в силу закона сохранения момента количества движения повернуться вокруг горизонтальной оси, относительно которой у кошки наименьший момент инерции.
При изучении вращения твердого тела, имеющего закрепленную точку, следует различать не совпадающие друг с другом: 1) ось вращения тела; 2) мгновенную ось вращения; 3) направление, или ось момента количества движения. Даже рассматриваемый частный случай движения тела, имеющего неподвижную точку, довольно сложен. Мы ограничимся приближенным изучением одного, еще более частного, но имеющего широкое научное и техническое применение случая. Рассмотрим приближенную теорию гироскопа.
|
|
|
Гироскопом называют массивное однородное тело вращения, быстро вращающееся относительно одной из главных осей инерции.
Из определения следует, что гироскоп обладает осью симметрии (поскольку он является телом вращения), которая служит одной из главных осей инерции (поскольку материал гироскопа однороден). Обычно за ось вращения гироскопа выбирается главная ось инерции, которой соответствует максимальный момент инерции. Эту ось будем называть осью гироскопа.
Допустим, ось гироскопа при его вращении остается неподвижной. Следовательно, вектор мгновенной угловой скорости  лежит на этой оси. Вектор момента количества движения
лежит на этой оси. Вектор момента количества движения  также направлен вдоль оси гироскопа. Таким образом, ось гироскопа, мгновенная ось вращения и ось момента количества движения в этом случае совпадают. В реальных условиях ось гироскопа лишь приближенно может считаться главной осью инерции, так как центр масс гироскопа всегда хоть немного смещен относительно оси симметрии. Кроме того, как мы увидим ниже, ось не может оставаться неподвижной, не будучи закрепленной в подшипниках, так как мы не в силах полностью избавиться от трения.
также направлен вдоль оси гироскопа. Таким образом, ось гироскопа, мгновенная ось вращения и ось момента количества движения в этом случае совпадают. В реальных условиях ось гироскопа лишь приближенно может считаться главной осью инерции, так как центр масс гироскопа всегда хоть немного смещен относительно оси симметрии. Кроме того, как мы увидим ниже, ось не может оставаться неподвижной, не будучи закрепленной в подшипниках, так как мы не в силах полностью избавиться от трения.
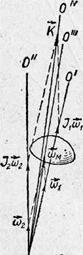
Положим, гироскоп имеет очень большую угловую скорость вращения  вокруг собственной оси ОО1 и в то же время ось медленно вращается с угловой скоростью
вокруг собственной оси ОО1 и в то же время ось медленно вращается с угловой скоростью  вокруг неподвижной вертикальной оси
вокруг неподвижной вертикальной оси  (рис.5).
(рис.5).
|
Направление мгновенной оси вращения определяется вектором мгновенной угловой скорости результирующего вращения  . Как видно из чертежа (вследствие того, что
. Как видно из чертежа (вследствие того, что ), мгновенная ось вращения лежит вблизи оси гироскопа.
), мгновенная ось вращения лежит вблизи оси гироскопа.
Построив вектор момента количества движения  ,
,
где  и
и  — моменты инерции гироскопа относительно соответствующих осей, можно убедиться, что и ось момента количества движения лежит вблизи оси гироскопа (рис.5) (При построении вектора
— моменты инерции гироскопа относительно соответствующих осей, можно убедиться, что и ось момента количества движения лежит вблизи оси гироскопа (рис.5) (При построении вектора  надо иметь в виду, что хотяи имеют разную величину, однако порядок их величины одинаков.)
надо иметь в виду, что хотяи имеют разную величину, однако порядок их величины одинаков.)
рис.№5. Вращение тела вокруг оси, закрепленной в одной точке, когда скорость вращения тела много больше скорости обращения.
Таким образом, при вращении реального гироскопа ось его, мгновенная ось вращения и ось момента количества движения хотя и не совпадают, но расхождение их направлений незначительно.
|
|
|
В основу приближенной теории гироскопа, которую мы рассмотрим ниже, кладется допущение, что все три указанные оси совпадают и неизменно связаны друг с другом. Другими словами, если мы видим, что ось гироскопа как-то изменяет свое положение в пространстве, мы считаем себя вправе сделать заключение, что также меняется в пространстве направление мгновенной угловой скорости вращения гироскопа и оси его момента количества движения.
И обратно, установив, что в силу каких-то причин (о них будет сказано ниже) вектор момента количества движения должен изменить свое положение, мы будем считать, что вместе с ним изменит свое положение и ось гироскопа. Уравнение  , для случая вращения тела вокруг неподвижной оси, справедливо и для движения гироскопа. Доказательство этого утверждения можно найти в курсе теоретической механики.
, для случая вращения тела вокруг неподвижной оси, справедливо и для движения гироскопа. Доказательство этого утверждения можно найти в курсе теоретической механики.
Из равенства  следует, что вектор момента количества движения изменяется только при действии на гироскоп момента внешних, сил. И так как мы допускаем, что ось гироскопа и ось момента количества движения жестко связаны, мы можем утверждать, что и перемещение оси гироскопа происходит пока действует момент внешних сил.
следует, что вектор момента количества движения изменяется только при действии на гироскоп момента внешних, сил. И так как мы допускаем, что ось гироскопа и ось момента количества движения жестко связаны, мы можем утверждать, что и перемещение оси гироскопа происходит пока действует момент внешних сил.
Чтобы сделать вращение гироскопа свободным от влияния внешних сил, необходимо свести к минимуму силы трения, действующие на гироскоп, и устранить действие силы тяжести. Уменьшение силы трения достигается особой конструкцией и обработкой оперных подшипников, в которые помещается ось гироскопа. Для устранения действия силы тяжести гироскоп заставляют вращаться вокруг оси, проходящей через центр масс. Тогда результирующая силы тяжести все время лежит на оси вращения, и момент ее равен нулю.
Свободный гироскоп имеет форму «колокольчика» с утяжеленным краем (рис. 6).

|
рис.№6 Гироскоп, имеющий форму «колокольчика»
Центр тяжести такого гироскопа находится внутри «колокольчика», и с ним совмещается конец оси 00. В технике чаще всего при создании свободного гироскопа используется карданов подвес (рис.№7)
|
|
|
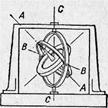 рис.№7 Гироскоп на кардановом подвесе. рис.№7 Гироскоп на кардановом подвесе.
|
Свободное твердое тело имеет шесть степеней свободы. Для описания поступательного движения его центра масс и вращения тела вокруг трех осей, проходящих через центр масс, мы можем составить шесть уравнений. Три из них, полученные на основе закона движения центра масс твердого тела:

связывают координаты x, у, z центра масс тела с составляющими результирующей внешних сил  по осям х, у, z.
по осям х, у, z.
Другие три уравнения, полученные из основного закона динамики вращающегося твердого тела:

связывают углы поворота тела вокруг осей x, у, z с моментами внешних сил относительно тех же осей.
Для того чтобы тело находилось в равновесии, т. е. не перемещалось вдоль осей и не вращалось вокруг них, необходимо выполнение следующих шести условий:

Для равновесия твердого тела, находящегося под действием произвольной системы сил, необходимо, чтобы сумма проекций всех сил на оси координат и сумма моментов этих сил относительно осей координат были равны нулю.
Если в данный момент тело находится в равновесии, то это не служит гарантией того, что оно останется в таком состоянии как угодно долго. В реальных условиях на всякое тело действуют случайные толчки, устранить которые принципиально невозможно. Чтобы выяснить, могут ли эти толчки вывести тело из состояния равновесия или нет, надо исследовать, как изменяется результирующая сил, действующих на тело, при малом его отклонении от положения равновесия.
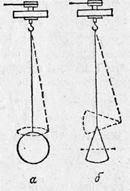
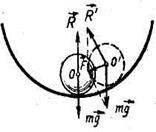
Положим, тело (шарик) находится в покое на дне гладкой ямы (рис. 7), в нижней точке которой на него действуют равные и противоположно направленные силы mg и R (их результирующая равна нулю). Отклоним шарик от положения равновесия. Теперь на него действует результирующая F сил mg и  , уже не равная нулю. Она направлена к положению равновесия, куда и возвратит шарик, когда перестанет действовать отклоняющий фактор. Если при малом отклонении тела от положения равновесия результирующая внешних сил не вызывает увеличения начального отклонения, то тело находится в устойчивом равновесии.
, уже не равная нулю. Она направлена к положению равновесия, куда и возвратит шарик, когда перестанет действовать отклоняющий фактор. Если при малом отклонении тела от положения равновесия результирующая внешних сил не вызывает увеличения начального отклонения, то тело находится в устойчивом равновесии.
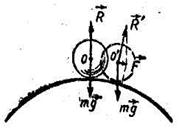
Положим, шарик находится в равновесии на вершине" гладкого купола (рис. 8). При этом силы, mg и R опять уравновешивают друг друга, и их результирующая равна нулю. При малейшем отклонении шарика от положения равновесия возникает результирующая F, отличная от нуля и удаляющая шарик от положения равновесия.
Если результирующая сила, возникающая при отклонении тела от положения равновесия, увеличивает начальное отклонение, равновесие тела называется неустойчивым.
|
И наконец, если при смещении тела от положения равновесия результирующая внешних сил остается равной нулю, равновесие называется безразличным. В безразличном равновесии находится, например, покоящийся на гладкой горизонтальной плоскости шарик.
|
рис.№7 Устойчивое равновесие. Рис.№8 Неустойчивое равновесие.
Состояние равновесия системы тел, на которую действуют внешние консервативные силы, устойчиво только в том случае, если ему соответствует минимум потенциальной энергии.
Допустим, что система, находящаяся под действием консервативных сил в состоянии равновесия, обладает минимумом потенциальной энергии. Значит, при любом отклонении от этого положения ее потенциальная энергия возрастает. Но в соответствии с законом сохранения энергии полная энергия консервативной системы, равная сумме кинетической Еk и потенциальной U энергии, остается постоянной:
 U=const.
U=const.
Следовательно, если в начальный момент времени все тела системы находились в покое, то движение может возникнуть лишь как результат перехода части потенциальной энергии в кинетическую {так как всегда  >0). Если же в начальный момент потенциальная энергия минимальна, то движение возникнуть не может и система находится в состоянии устойчивого равновесия.
>0). Если же в начальный момент потенциальная энергия минимальна, то движение возникнуть не может и система находится в состоянии устойчивого равновесия.
При безразличном равновесии потенциальная энергия одинакова для близких положений тел системы.
В поле силы тяжести тело обладает минимумом потенциальной энергии, когда его центр тяжести занимает наинизшее положение. Таким образом, состояние устойчивого равновесия тела в поле силы тяжести соответствует наинизшему положению его центра тяжести.
Лекция 12. Закон тяготения Ньютона, постоянная тяготения и ее измерение. Гравитационная и инертная масса тела. Понятие о поле тяготения. Гравитационное поле. Однородное и центральное поле. Напряженность и потенциал поля тяготения.
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 516; Нарушение авторских прав?; Мы поможем в написании вашей работы!