КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 2. Геометрическая интерпретация решения задач линейного программирования
|
|
|
|
План
1. Геометрический смысл задачи линейной оптимизации.
2. Алгоритм графического решения задач ЛП.
1. Пусть дана задача ЛП:
Z = c 1 x 1 + c 2 x 2 + ⋅⋅⋅ + cn xn → max, (1)
|
⎪
⎪ a 21 x 1 22 2 2 n n 2
⎨
⎪.......................................
⎪⎩ am 1 x 1 + am 2 x 2 + ⋅⋅⋅ + amn xn ≤ bm
(2)
 x j ≥ 0 (j =1, n). (3)
x j ≥ 0 (j =1, n). (3)
Рассмотрим систему ограничений (2) с геометрической точки зрения. Ка-
ждое равенство
a 1 x 1 + a 2 x 2 = b
определяет прямую в пространстве
R. Эта пря-
мая делит координатную плоскость на две полуплоскости, определяемые нера-
венствами
a 1 x 1 + a 2 x 2 ≤ b
и a 1 x 1 + a 2 x 2 ≥ b. Данные полуплоскости содержат
прямую в качестве границы.
Равенство
a 1 x 1 + a 2 x 2 + a 3 x 3 = b
представляет собой плоскость в
R. Эта
плоскость делит пространство на два полупространства, задаваемые неравенст-
вами
a 1 x 1 + a 2 x 2 + a 3 x 3 ≤ b и
a 1 x 1 + a 2 x 2 + a 3 x 3 ≥ b. Граница полупространств –
данная плоскость – принадлежит им.
По аналогии равенство
a 1 x 1 + a 2 x 2 +... + anxn = b
называют гиперплоско-
стью в пространстве
Rn. Это граничная гиперплоскость для полупространств,
определяемых неравенствами. Т.о., система ограничений задачи ЛП (2) содер-
жит m полупространств из пространства
Rn. Если система совместна (имеет
хотя бы одно решение), то она определяет выпуклый многогранник, который является геометрическим образом ОДР. Аналогично с трёхмерным пространст- вом будем считать, что угловыми точками выпуклого многогранника в n - мерном пространстве будут его вершины, образованные пересечением гиперп- лоскостей.
Любая внутренняя и граничная точка ОДР является допустимым решени-
|
|
|
ем задачи. Приравняем целевую функцию к нулю. Тогда уравнение
c 1 x 1 + c 2 x 2 + ⋅⋅⋅ + cn xn = 0
определяет в
Rn гиперплоскость, проходящую через начало координат и пер-
пендикулярную вектору-градиенту
c = (с 1, с 2,..., cn). Направление вектора-
градиента показывает направление возрастания функции (рис. 1).
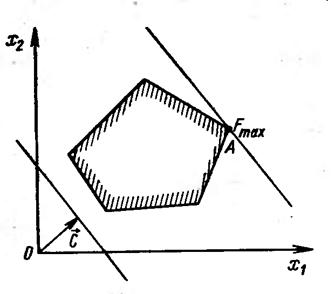
Рис. 1. Графическая иллюстрация задачи ЛП
Поэтому, чтобы найти максимум функции, необходимо передвигать па- раллельными переносами эту гиперплоскость в направлении вектора как можно дальше от начала координат, но чтобы она имела с ОДР хотя бы одну общую точку. Минимум целевой функции достигается в точке ОДР, которая будет ближайшей к началу координат при пересечении с перемещаемой гиперплоско- стью.
2. Пусть задача ЛП содержит только две переменные
x 1 и
x 2:
Z = c 1 x 1 + c 2 x 2 → max, (4)
|
⎪ a 21 x 1 22 2 2
⎨
⎪.......................
⎩⎪ am 1 x 1 + am 2 x 2 ≤ bm
(5)
 x j ≥ 0 (j =1, 2). (6)
x j ≥ 0 (j =1, 2). (6)
Тогда все построения можно выполнить в координатной плоскости и решить
задачу (4)-(6) графически.
Приведём алгоритм графического решения задачи ЛП:
 1. Записать уравнения граничных прямых
1. Записать уравнения граничных прямых
аi 1 x 1 + аi 2 x 2 = bi
(i =1, m) и построить
их на плоскости
x 1 Ox 2.
2. Определить полуплоскости, которые соответствуют каждому ограничению-
неравенству с помощью контрольной точки.
3. Выделить область допустимых решений (ОДР).
4. Построить вектор
G
c = (с 1 ,с 2)
– направление наибольшего возрастания целе-
вой функции Z:
G
c = (с 1 ,с 2) = grad Z
⎛ ∂Z
= ⎜ ∂ x
, ∂ Z ⎞.

|
 ⎝ 1 2 ⎠
⎝ 1 2 ⎠
5. Построить прямую, перпендикулярную вектору c. Её называют линией
уровня или изоцелью. G
6. Перемещать эту прямую в направлении вектора c, если задача на максимум,
и в противоположном направлении, если задача на минимум, пока она не станет касательной (опорной) к ОДР.
|
|
|
7. Определить координаты оптимальной точки и вычислить оптимальное зна-
чение функции Z.
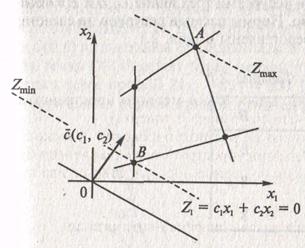
Рассмотрим наиболее типичные ситуации, возникающие при графических решениях задачи ЛП. На рис. 2, А) показано, что в угловой точке A целевая функция достигает максимального значения, а в точке B – минимального.
Рис. 2, Б) отражает случай, когда линия уровня параллельна отрезку AB,
принадлежащему ОДР. Максимум целевой функции достигается в точке A, в
точке B (Z max
= Z (A) = Z (B)) и в любой точке отрезка AB. Поэтому оптималь-
ных решений будет бесконечное множество и все они описываются выпуклой комбинацией точек A и B:
X * = λ(x 1, A; x 2, A) + (1 − λ)(x 1, B; x 2, B) = (λ x 1, A + (1 − λ) x 1, B; λ x 2, A + (1 − λ) x 2, B),
где 0 ≤ λ ≤1.
|
|
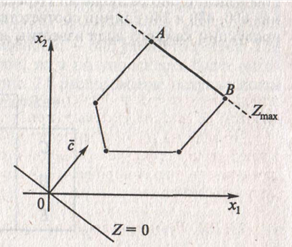
Рис. 2. Наличие графического решения задач ЛП
Напомним, что выпуклой линейной комбинацией произвольных n -
n
мерных векторов
X 1, X 2,..., X n
из пространства
R называется сумма
λ1 X 1 + λ2 X 2 +... + λ n X n,
n
где числа
λ j ≥ 0 (j =1, n) и
∑ λ j
j =1
=1.
Заметим, что в пространстве
R 2 выполняется равенство λ + λ
=1. Обо-
значим вид
λ1 = λ, тогда
1 2
λ2 =1 − λ. Поэтому выпуклая линейная комбинация имеет
λ X 1 + (1 − λ) X 2,
где 0 ≤ λ ≤1.
Принципиально другие ситуации рассмотрены на рис. 3. Так рис. 3, А)
изображает вариант, когда система ограничений образует неограниченное сверху множество. Функция Z при этом стремится к бесконечности. На рис. 3,
Б) представлен случай несовместной системы ограничений.

|
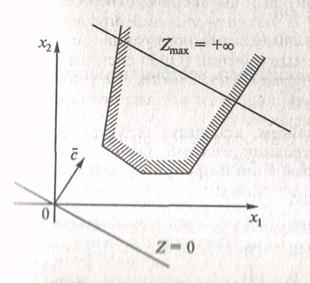
Рис. 3. Случаи отсутствия решения задач ЛП
Домашнее задание. Составить четыре конкретные задачи ЛП на мини-
мум, аналогичные ситуациям, рассмотренным на рис. 2 и 3.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 814; Нарушение авторских прав?; Мы поможем в написании вашей работы!