КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
І регулюючого органу
Характеристик об‘єкту управління, чуттевого елементу
Визначення статистичних і динамічних
Для визначення математичних моделей використовують матеріали переддипломної практики, результати науково-дослідницької роботи або літературні джерела, в яких приводяться точні дані по статистиці і динаміці елементів системи (передусім об’єкту управління). Це можуть бути записи на діаграмній стрічці керуючих, управляючих і контролюючих збурюючих дій, експерементально зняті криві розгону, реакції на гармонічні збурення і т.д.
Лише при відсутності цих матеріалів можна використовувати в пректах математичні моделі аналогічних пристроїв або намагатися визначити ці моделі аналітичним шляхом на основі спрощуючих припущень.
Визначення статистичних характеристик. Для аналітичного опису статистичних характеристик, одержаних в експеременті (пасивному чи активному), знаходять застосування регресійні моделі вигляду степеневого полінома
 (((5.1)
(((5.1)
де а – коефіцієнти регресивної моделі, які потрібно визначати; и – змінні (фактори), які впливають на уі (сюди відносяться компонентів векторів Х і Z на рис 2.1)
При пасивному експеременті дослідницькі дані заносять в таблицю 5.1. з деяким кроком Δ t, який залежить від інерційності процесів.
5.1 Експериментальні дані для визначення статичної характеристики
| u1 (k) | u2 (k) | ….. | ur (k) | yi (k) |
| u1 (1) | u2 (1) | ….. | ur (1) | yi (1) |
| u1 (2) | u2 (2) | ….. | ur (2) | yi (2) |
| … | … | … | … | … |
| … | … | … | … | … |
| … | … | … | … | … |
| u1 (n) | u2 (n) | ….. | ur (n) | yi (n) |
Далі розрахунок ведуть за методом найменших квадратів. Для випадку лінійної регресії система нормальних рівнянь має наступний вигляд:
 (5.2)
(5.2)
Для вирішення нормальних рівнянь потрібно використовувати мікро-ЕОМ.
Підготовка експерименту по ідентифікації і вибір форми досліджу вального сигналу. Підготовка апаратури для проведення експерименту – початковий етап ідентифікації об’єкта. На цьому етапі необхідно вибрати датчики для вимірювання вхідних сигналів і виходу об’єкта [4, 21]. Характеристики датчиків повинні бути лінійними, стабільними і практично безінерційними (порівняно з динамічними властивостями об’єкта). Оскільки вихід об’єкта найчастіше реєструється на діаграмній стрічці, то необхідно підібрати таку швидкість руху стрічки при записі процесу, щоб перехідна функція помістилась на відрізку довжиною не більше 200 мм. Крім того, при незначному зміненні вхідного сигналу потрібно використовувати прилади (самописні мости, потенціометри і міліамперметри) з «втопленим» нулем і розтягненою шкалою. Найкраще використовувати прилади з прямокутною шкалою.
Далі необхідно вирішити питання про вид досліджуваної дії і її амплітуді. При цьому необхідно користуватися наступними порадами.
1. Ступінчата функція виду А1 (t) використовується при попередньому вивченні динаміки об’єктів з самовирівнюванням, коли по технології допускається тривале відхилення виходу від номінального значення. Ця функція дозволяє визначити значення амплітудно – фазової характеристики (АФХ) в області низьких частот.
2. Реальну ступінчату функцію з часом фронту t1 і амплітудою А найчастіше використовують для ідентифікації об’єктів, які мають виконавчі механізми з постійною швидкістю. Границя точної оцінки АФХ при цьому сигналі визначається величиною 2/ t1.
3. Прямокутний імпульс тривалістю Т і амплітудою А використовують при ідентифікації об’єктів без самовирівнюванні і (або) об’єктів, не допускаючих тривалого відхилення від номінального режиму. Границя оцінки АФХ при цьому сигналі визначається величиною 4/ t1.
4. Трапецеїдальний імпульс тривалістю Т з однаковими довжинами переднього і заднього фронту t1 і амплітудою використовують для ідентифікації об’єктів без самовирівнювання, обладнаних виконавчими механізмами постійної швидкості. Верхня границя оцінки АФХ при такому досліджуваному сигналі визначається як 6/Т.
5. Меандровий –сигнал (прямокутна хвиля) з періодом Т і амплітудою А застосовують при тих же умовах, що і сигнали в пунктах 3 і 4, але для діапазону частот, обмеженого знизу значенням 1/Т, а зверху – значенням 4/Т.
6. Періодичний синусоїдальний сигнал застосовують для ідентифікації „ мало шумних” об’єктів з лінійними регулюючими органами за наявності генератора синусоїдальних коливань.
7. Періодичний прямокутний сигнал (-1)n А (n = 0, 1, 2…) застосовують для ідентифікації „ шумних” об’єктів з нелінійними регулюючими органами і за відсутності генератора синусоїдальних коливань.
8. Періодичний трапецеїдальний сигнал використовують для ідентифікації об’єктів, обладнаних виконавчими механізмами постійної швидкості. Цей сигнал дає більш точні значення АФХ в області низьких частот порівняно з періодичним прямокутним сигналом.
Необхідно запам’ятати, що при ідентифікації в складі об’єкта управління враховують регулюючий орган (на вході) і датчик вихідної величини (на виході). Вибір регулюючого органу – це самостійне завдання. Його вибирають за умовною пропускною здатністю, умовному і робочому тискові (ГОСТ 356-80 або СТ СЕВ 253-76), перепаду тиску на регулюючому органі і по умовному проходу.
Для об’єкта управління з основними збуреннями по каналу зміни навантаження віддають перевагу дросельним пристроям з лінійною здатністю, а для об’єкта управління з основними збуреннями по каналу регулюючої дії – пристроям з рівноцінною пропускною здатністю.
Датчик вихідної величини повинен мати лінійну і однозначну статичну характеристику і значно (на порядок і вище) меншу постійну часу. Він повинен також зберігати робото здатність в заданих умовах навколишнього середовища, бути надійним, стабільним, малогабаритним і дешевим. Варто пам’ятати про те, що точність датчиків (класи точності 0,25; 0,4; 0,6; 1,0; 1,5; 2,5; 4,0) повинна бути не нижча класу точності вторинного приладу, який використовується для реєстрації перехідного процесу. При виборі (розрахунку0 датчиків і регулюючих органів керуються технічним завданням на дипломне проектування і користуються спеціальною літературою [32, 37].
Визначення динамічних характеристик. В якості оцінюваних динамічних характеристик при ідентифікації використовують диференційні рівняння об’єкта, його передаточні функції і АФХ. Всі характеристики для лінеаризованого об’єкта однозначно взаємопов’язані і тому досить визначити в аналітичній формі хоча б одну із них.
Обробка експериментальних даних при ідентифікації залежить від ступеня викривлення даних і від прийнятих моделей, апроксимуючих поведінку реального об’єкта.
Найбільш характерні наступні випадки.
І. при ступінчастому вхідному сигналі А1 (t) знята не викривлена крива розгону об’єкту х (t), яка в безрозмірній формі має вигляд
 (5.3)
(5.3)
Якщо зняті криві розгону для різних А, то попередньо знаходять їх середнє значення (якщо вони відрізняються не більше чим на 3…4 %):
 (5.4)
(5.4)
Можливі різні типи кривих розгону (рис. 5.5 … 5.8). відповідно використовуються і різні моделі реальних об’єктів.
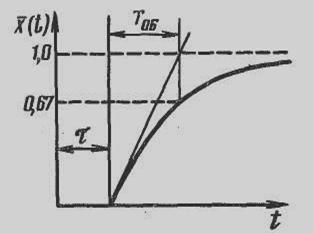
Для графіка на рисунку 5.5
 . (5.5)
. (5.5)
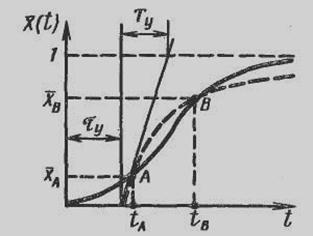
Для перехідної функції двоємнісного (рис. 5.6)
 , (5.6)
, (5.6)
 . (5.7)
. (5.7)
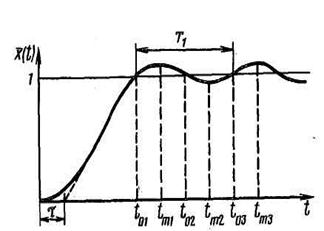
Для перехідної функції коливального об’єкту з запізненням (рис. 5.77)

 . (5.8)
. (5.8)
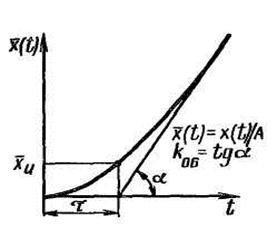
Якщо об’єкт без самовирівнювання (рис. 5.8), то модель приймає вигляд
 , (5.9)
, (5.9)
 . (5.10)
. (5.10)
Для моделі заданої співвідношенням (5.5), параметри τ, Тоб знаходять по графіку на рис. 5.5, а k об знаходять із співвідношення
 . (5.11)
. (5.11)
| 
|
| Рис. 5.5. Перехідна функція одноємнісного об’єкта з запізненням | Рис. 5.6. Перехідна функція двоємнісного об’єкта. |
| 
|
| Рис. 5.7. Перехідна функція коливального об’єкта з запізненням. | Рис. 5.8. Перехідна функція об’єкта без самовирівнювання. |
Для кривої з перегином (рис.5.6) і моделі, заданої співвідношенням (5.6), припускається, що точка А співпадає з точкою перегину, а точка В знаходиться в границях 0,8 … 0,9.Параметри моделі знаходять, виходячи із умови, що апроксимована крива розгону проходить через точки А і В; k об визначають із співвідношення (5.11) τу і Ту знаходять з наступних виразів:
 (5.12)
(5.12)
При використанні моделі, заданої виразом (5.7), коефіцієнти передаточної функції а і, b i знаходять за допомогою методу «площ». Для цього спочатку розраховують «площі» Si, які визначаються за допомогою кривої розгону:
 (5.13)
(5.13)
Наприклад, при і = 4

Значення Sgo розраховують на ЕОМ за однією з формул наближеного розрахунку визначеного інтегралу.
В ході розрахунку Si визначають значення |S і /S i -1|. Якщо це відношення буду менше заданого рівня Δ, розрахунок Si зупиняють, приймаючи порядок знаменника передаточної функції дорівнює і – 1.
Якщо Si буде менше нуля, то незалежно від рівня |S і /S i -1| розрахунок зупиняють і приймають порядок знаменника рівним і - 1.
Якщо розрахунок S i зупинено внаслідок того, що |S і /S i -1| < Δ, то всі коефіцієнти b j приймають рівними 0, а коефіцієнти a j визначають за формулою:
a j = Sj, j = 1,2, …, i – 1. (5.14)
Якщо S i < 0, то крім a j, j = 1,2, …, i – 1, визначають b 1:
 (5.15)
(5.15)
В загальному випадку, якщо b 1 < Δ, його можна не враховувати і розрахунки вести по співвідношенні (5.14)
Провірити правильність апроксимації можна шляхом побудови апроксимованої перехідної характеристики
Ha (t) = L-1  (5.16)
(5.16)
де Ha (s) беруть або по (5.6), або по (5.7).
Апроксимація вважається задовільною, якщо максимальна різниця між h a (t) і  (t) не більше 0,03 … 0,05.
(t) не більше 0,03 … 0,05.
Для кривої розгону з пере регулюванням (рис. 5.7) параметри моделі знаходять наступним чином. В напівлогарифмічному масштабі будують криву
ln |1 - (tmg) | = f (tmg), g = 1, 2, …, (5.17)
яка апроксимується асимптотою при tmg  . Нехай асимптота відрізає на осі ординат відрізок a х, а на осі абсцис – відрізок a t. Тоді
. Нехай асимптота відрізає на осі ординат відрізок a х, а на осі абсцис – відрізок a t. Тоді
 (5.18)
(5.18)
де Т1 і t01 визначають за графіком на рис. 5.7.
Для моделі (5.9) параметри k об 1, τ знаходять із умов:
 (5.19)
(5.19)
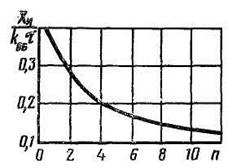
Для моделі (5.10) спочатку знаходять величини k об 1, τ і допоміжну величину і. Значення τ знаходять шляхом проведення асимптоти. Потім за значенням і / (k об 1 τ) із графіка (рис. 5.9) знаходять найближче ціле значення n, по якому визначають Т:
Т = τ / n. (5.20)
ІІ. При ступінчастому вхідному сигналі А1(t) знята викривлена крива розгону об’єкта х (t). Вона має неколивальний характер і являє собою суміш дійсної перехідної характеристики h (t) з шумом n (t), який має нульове середнє значення і сталу спектральну щільність в смузі частот (0, ωср). Наближений вигляд перехідної функції, викривленої шумом n (t), зображений на рис. 5.10.
Перед тим, як використовувати експериментальну криву розгону (рис. 5.10) з метою ідентифікації, її вирівнюють. Для цього всі експериментальні дані заносять в таблицю 5.2 з таким сталим кроком Δt, щоб Те / Δt = 30 …40, де Те – тривалість експерименту.
5.2. Експериментальна крива розгону
| і | … | n | ||
| хі | x0 | x1 | … | xn |
Далі вирівнюють експериментальну криву одним із основних методів: ковзаючим осередненням або четвертними разностями.
Операцію згладжування середнього значення ковзання виконують за допомогою формули
 і = 0, 1, 2, …, (n - l), (5.21)
і = 0, 1, 2, …, (n - l), (5.21)
де h* - ордината оцінки передої функції h (t).
На якість згладжування впливає вибір l: якщо значення l невелике збурення подавляється погано, а при великих l втрачаються суттєві особливості h * (t). Рекомендується вибирати l в межах рівних 2 … 4.
| 
|
| Рис. 5.9.Визначення порядку моделі об’єкта без самовирівнювання. | Рис. 5.10. Викривлена перехідна функція об’єкта. |
Згладжування четвертними разностями еквівалентне апроксимації методом найменших квадратів кожних п’яти сусідніх значень хі параболою другого порядку. Розрахунки виконують за допомогою наступних формул:
 (5.22)
(5.22)
де  (5.23)
(5.23)
Значення k b Δ 4 xk відповідають і = 2, 3, …, n – 2, а  - значенням k = 1 і k = n – 2.
- значенням k = 1 і k = n – 2.
Операцію згладжування четвертними разностями можна повторити декілька раз, використовуючи одержані значення як вихідні для повторного розрахунку.
ІІІ. При синусоїдальному впливові зняті значення АЧХ W (ωi) і ФЧХ φ (ωi) за відсутності завад. Звичайно АФХ об’єкта визначається в інтервалі частот [ωmin, ωmax], при якому фазові зсуви знаходяться в діапазоні від -90 до -230º. Для цього достатньо провести вимірювання на N = 6 …8 частотах вказаного діапазону з реєстрацією 6 … 10 періодів коливань на вході і виході. Попередньо необхідно оцінити частоти ωπ і ωср, де ωπ визначається із умови запізнення фази вихідних коливань від фази вхідних на 180º, тобто на π радіан, а ωср визначається як частота досліджуваного сигналу максимально можливої амплітуди, при якій коливання вихідної не уловлюються вимірювальним (реєструючим) приладом. Частоти періодичного сигналу вибирають із ряду
ωπ/3; ωπ/2; 2ωπ/3; 5ωπ/6; ωπ; 7ωπ/6; 4ωπ/3; 3ωπ/2;
(ωср - ωπ) / 2.
Для перевірки лінійності статичної характеристики об’єкту необхідно провести експерименти при двох і більше різних амплітудах вхідного сигналу. Передаточна функція статичного об’єкту апроксимується виразом
 , m < n, (5.24)
, m < n, (5.24)
при цьому m + n= 2 N. Величина kоб відома із вимірювань ступінчастої дії.
Для визначення часу чистого запізнення τ також використовують експериментальну криву розгону.
Експериментальна АФХ може бути записана в вигляді

υ = 1, 2, …, N. (5.25)
Апроксимуюча АФХ, визначається за виразом (5.24) при τ = 0 і s = j ων
 (5.26)
(5.26)
Далі відповідно до умов інтерполяційної апроксимації одержимо систему лінійних (відповідно a i i bi) рівнянь:
Ке (j ων) = Ка (j ων), ν = 1, 2, …, N. (5.27)
Розглядаючи Ке (j ων) і Ка (j ων) за формулами (5.25) і (5.26), систему рівнянь (5.27) неважко привести до наступного вигляду:
 (5.28)
(5.28)
Для вирішення системи (5.28) також потрібно використовувати ЕОМ.
Розглянутий підхід використаємо і для апроксимації АФХ об’єктів з більш простою передаточною функцією виглядом
 (5.29)
(5.29)
без попередньої оцінки kоб і τ. В цьому випадку експерименти достатньо провести на двох частотах ω1 і ω2 таких, що
φе (ω1) = - π/4, φе (ω2) = - π/2. (5.30)
При вирішенні (5.30) невідомі kоб, τ і Тоб знаходять із виразів
 (5.31)
(5.31)
τ = arcctg (ω2Tоб) / ω2. (5.32)
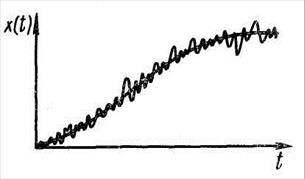
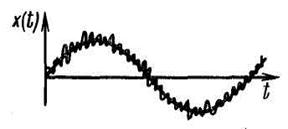
ІV. При синусоїдальній дії зняті гармонічні коливання, в значній ступені викривлені шумом (які мають, наприклад, вигляд, показаний на рис. 5.11).
Для вирівнювання експериментальних даних використовуються апаратні методи. В якості вирівнювальних пристроїв використовують низькочастотні фільтри або прилад для зняття АФХ амплітудо – статичним методом.
Фільтри використовують для зглажування експериментальних даних з адитивним шумом, середнє квадратичне значення якого менше амплітуди основної гармоніки коливань. Використовуються також переналаштовуючі фільтри з передаточними функціями
 (5.33)
(5.33)
де kф і Тg змінюється в залежності від частоти основної гармоніки ω і відношення сигнал/шум.
Амплітудно-статичний метод використовуються в випадку адитивного шуму, середнє квадратичне якого більше корисного сигналу х 1 (t).
| 
|
| Рис. 5.11. Викривлена реакція об’єкта на гармонічну вхідну дію. | Рис. 5.12 Схема установки для визначення АФХ амплітудним способам |
Схема експериментальної установки для визначення АФХ по амплітудному методу зображена на рис 5.12. Протяжність експерименту Те на випадковій частоті ω = 2π/Т вибирають, виходячи із умови: Те ≥ 20 Т. Сигнали хс призначені для відключення входу інтегралів після закінчення часу експерименту.
Генератор синусоїдальних коливань (ГСК) повинен виробляти квадратні складові А sinωt і A cosωt і забезпечити варіювання частоти в діапазоні від ωπ/3 до (ωср - ωπ) /2.
Точки АФХ розраховують за наступними формулами:
 (5.34)
(5.34)
Після вирівнювання можна застосувати методи випадку ІІІ.
|
|
Дата добавления: 2014-01-07; Просмотров: 455; Нарушение авторских прав?; Мы поможем в написании вашей работы!