КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Нелинейное управление положением спутника
|
|
|
|
Рассмотрим жесткий спутник, изображенный на рис.15.5.
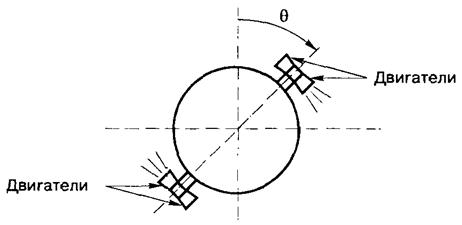
Рисунок 15.5. Нелинейная система – искусственный спутник Земли.
Предполагается, что спутник жесткий, трение отсутствует, и что он вращается относительно оси, перпендикулярной странице книги. Вращающий момент, прикладываемый к спутнику, создается двигателями. Например, если включены два двигателя, как показано на рис.15.5., это приводит к уменьшению угла  . Если же включена другая пара двигателей, то угол имеет тенденцию к увеличению. Предполагается, что момент
. Если же включена другая пара двигателей, то угол имеет тенденцию к увеличению. Предполагается, что момент  , создаваемый двигателями, является входом системы, а угол
, создаваемый двигателями, является входом системы, а угол  — ее выходом. Тогда:
— ее выходом. Тогда:
поскольку трение о воздух отсутствует (J — момент инерции спутника). В этом случае передаточная функция равна
Это достаточно точная модель жесткого спутника, и она часто используется во многих примерах в силу ее простоты. Однако если к спутнику прикреплены солнечные панели, то допущение о его жесткости уже не действует (одни части спутника могут перемещаться относительно других частей), и модель получается более сложной.
Система управления спутником предназначена для поддержания его заданного углового положения путем включения двигателей, показанных на рисунке 15.5. Модель системы описывается уравнением

где t — момент, развиваемый двигателями, J — момент инерции спутника, а и можно рассматривать как нормированный момент. Модель спутника в фазовых переменных имеет вид:

Предполагается, что двигатели развивают постоянную тягу, т.е.

На рис.15.5 включению двигателей соответствует уменьшение угла , поэтому

Для двух других двигателей  .
.
Модель спутника имеет вид
Сначала рассмотрим случай, когда . Уравнение фазовых траекторий в дифференциальной форме:
|
|
|
 ,
,
 ,
,
или
 .
.
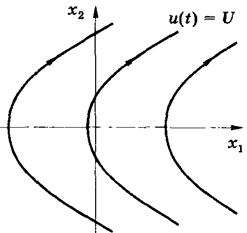
Проинтегрировав это уравнение, получим:
где С1 ‑ постоянная интегрирования, определяемая из начальных условий:
 .
.
Таким образом, на плоскости (x1, x2) мы получили семейство парабол, изображенное на рис.15.6,а.
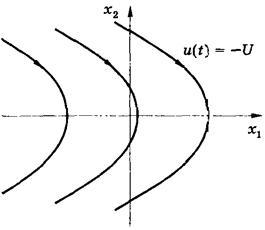
При решение уравнений состояния дает результат
С2 ‑ постоянная интегрирования, определяемая из начальных условий:

Фазовый портрет для данного случая приведен на рис.15.6,б.
а) б)
Рисунок 15.6. Фазовые портреты спутника при вращении в разные стороны
Рассмотрим замкнутую систему управления спутником, изображенную на рис.15.7.
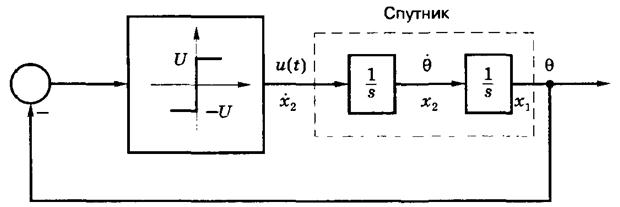
Рисунок 15.7. Структурная схема замкнутой САУ спутником
Эта система с обратной связью предназначена для поддержания углового положения спутника  . Если
. Если  , то соответствующие двигатели включаются, стремясь вернуть угол к 0°.
, то соответствующие двигатели включаются, стремясь вернуть угол к 0°.
Когда  то
то  и действительны траектории, изображенные на рис.15.6,а.
и действительны траектории, изображенные на рис.15.6,а.
Если же  то
то  и действительны траектории, изображенные на рис.15.6,б.
и действительны траектории, изображенные на рис.15.6,б.
Заметим, что переключение u(t) происходит при  , поэтому линия (ось х2) является линией переключения. Типичная траектория движения системы изображена на рис.15.8,а откуда следует, что в ней возникают незатухающие колебания. Фазовый портрет приведен на рис.15.8,б. Очевидно, что система управления с такой динамикой является неприемлемой.
, поэтому линия (ось х2) является линией переключения. Типичная траектория движения системы изображена на рис.15.8,а откуда следует, что в ней возникают незатухающие колебания. Фазовый портрет приведен на рис.15.8,б. Очевидно, что система управления с такой динамикой является неприемлемой.
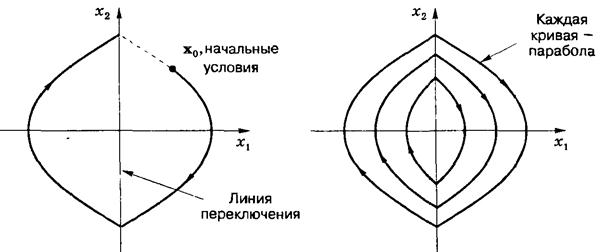
Рисунок 15.8. Фазовая траектория (а) и фазовый портрет (б) замкнутой САУ
Для улучшения динамических свойств системы используется обратная связь по скорости, как показано на рис.15.9.
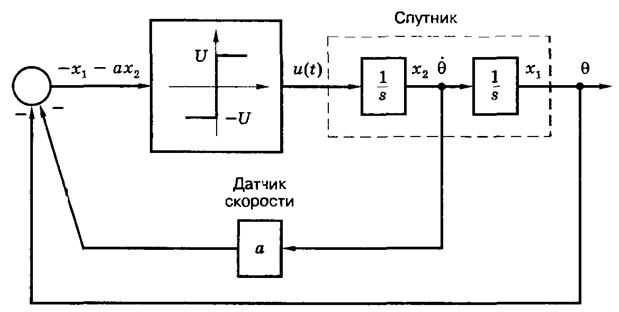
Рисунок 15.9. Система управления спутником с обратной связью по скорости
Информацию об угловой скорости спутника содержит выходной сигнал от датчика с коэффициентом усиления a. Входной сигнал спутника по-прежнему принимает значения ±U, и траектории движения объекта на фазовой плоскости остаются параболами, как и в случае неуправляемого спутника.
Однако теперь иначе выглядят условия переключений u(t): они происходят, когда сигнал на входе реле равен нулю, т.е.
|
|
|
 ,
,
 .
.
Это уравнение определяет линию переключения - прямую с наклоном
 .
.
Типичная фазовая траектория в данном случае показана на рис.15.10,а.
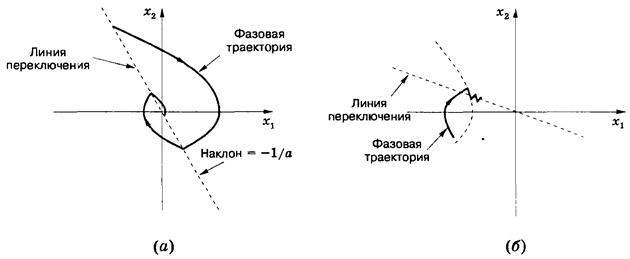
Рисунок 15.10. Фазовые траектории системы управления спутником с обратной связью по скорости
Из рисунка 15.10 видно, что динамика системы значительно улучшилась; причиной этого является введение коррекции с опережением по фазе, аналогичной действию ПД-регулятора. Более того, точка равновесия в начале координат теперь является асимптотически устойчивой. В системах, содержащих идеальную релейную характеристику, может возникать особый вид движения, называемый «дребезгом». Условия возникновения такого режима работы проиллюстрированы на рис.15.10,б. Если наклон линии переключения является малым, то по мере приближения траектории к началу координат она всегда стремится пересечь линию переключения независимо от того, по какую сторону от нее находится. Это приводит к тому, что фазовая траектория «скользит» вдоль линии переключения к началу координат. Это явление известно под названием «скользящий режим».
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 600; Нарушение авторских прав?; Мы поможем в написании вашей работы!