КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Нелинейные корректирующие устройства
Все корректирующие устройства, применяемые в системах автоматического управления, можно разделить на линейные и нелинейные. Линейные корректирующие устройства имеют ряд достоинств и широко применяются для улучшения динамических свойств как линейных, так и нелинейных автоматических систем. Вместе с тем линейным корректирующим устройствам присущи и недостатки. К ним, в частности, следует отнести жесткую зависимость между амплитудными и фазовыми частотными характеристиками. Так, например, дифференцирующие фазоопережающие цепи создают положительный сдвиг, но одновременно вносят ослабление в области низких частот, т. е. в области спектра полезного сигнала. Этим объясняется низкая помехоустойчивость дифференцирующих цепей. Интегрирующие корректирующие контуры подавляют высокие частоты, но при этом создают запаздывание по фазе, что приводит к ухудшению переходных процессов и т. д. В то же время было бы желательно, чтобы корректирующие устройства' создавали опережение по фазе без изменения амплитудной характеристики, подавляли высокие частоты без изменения фазовой характеристики, обеспечивали опережение по фазе и одновременно ослабляли высокие частоты. Эти задачи могут быть решены с помощью нелинейных корректирующих устройств.
Кроме указанных недостатков, линейные корректирующие устройства имеют ограниченные возможности в получении высоких показателей качества в автоматических системах. Например, если в линейной системе для повышения быстродействия (уменьшения времени переходного процесса tп, рис.) увеличивать коэффициент усиления разомкнутой системы kp то это приводит к уменьшению запаса устойчивости, увеличению колебательности переходного процесса. Для иллюстрации сказанного на рис.17.12 приведены кривые 1 и 2 переходных процессов линейной САУ при kp1 и kp2 соответственно  . Применение линейных корректирующих устройств позволяет повысить в некоторых пределах значение коэффициента усиления системы, однако это не снимает указанного противоречия и необходимости компромиссного решения при выборе коэффициента усиления системы и настройке корректирующего устройства.
. Применение линейных корректирующих устройств позволяет повысить в некоторых пределах значение коэффициента усиления системы, однако это не снимает указанного противоречия и необходимости компромиссного решения при выборе коэффициента усиления системы и настройке корректирующего устройства.
Указанное противоречие можно устранить применением нелинейных корректирующих устройств, изменяющих свое влияние на систему в зависимости от величины отклонения от установившегося режима (ошибки системы).
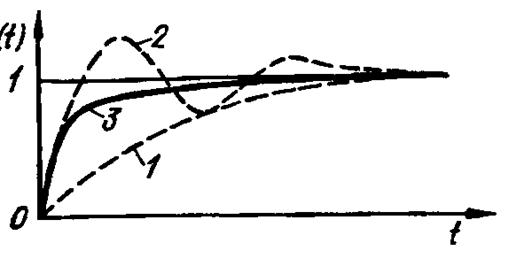
Рисунок 17.12. Переходные процессы САУ при линейной (1 и 2) и нелинейной коррекции
В результате применения такой нелинейной коррекции может быть получен желаемый процесс, изображенный, например, на рис.17.12 кривой 3. Как видно из рисунка, он сочетает полезные свойства процессов 1 и 2: начальная часть процесса 3 совпадает с процессом 2 линейной системы, благодаря чему обеспечивается большое быстродействие системы, а окончание процесса 3 подобно окончанию процесса 1, т. е. является монотонным. Такой процесс, может быть, достигнут, например, изменением коэффициента усиления разомкнутой системы, kp в зависимости от величины ошибки  . При больших значение kp должно быть большим, чтобы обеспечить быстрое уменьшение ошибки (начальный участок кривой 3), а по мере уменьшения значение kp должно уменьшаться для завершения переходного процесса без перерегулирования. Такое изменение kp может быть реализовано, например, с помощью простейшего последовательного нелинейного корректирующего устройства (рис.17.13).
. При больших значение kp должно быть большим, чтобы обеспечить быстрое уменьшение ошибки (начальный участок кривой 3), а по мере уменьшения значение kp должно уменьшаться для завершения переходного процесса без перерегулирования. Такое изменение kp может быть реализовано, например, с помощью простейшего последовательного нелинейного корректирующего устройства (рис.17.13).
При больших значениях напряжения ошибки ив нелинейное сопротивление R1 мало и поэтому коэффициент усиления цепи  большой. По мере уменьшения ив нелинейное сопротивление R1 увеличивается, а коэффициент усиления k1 уменьшается.
большой. По мере уменьшения ив нелинейное сопротивление R1 увеличивается, а коэффициент усиления k1 уменьшается.
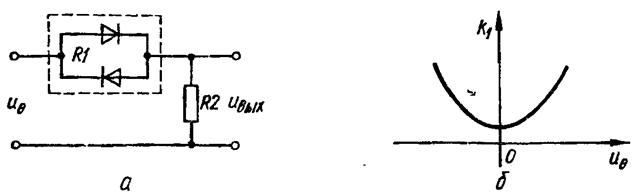
Рисунок 17.13. Последовательное нелинейное корректирующее устройство (а) и его характеристика (б)
Примерный график зависимости k1 от ив изображен на рис.17.13,б. По такому же графику будет изменяться и коэффициент усиления системы kp. Недостаток коррекции с помощью рассматриваемого корректирующего устройства состоит в том, что оно изменяет лишь kp системы, не компенсируя при этом вредное влияние инерционности ее элементов. Из-за этого получаются малые значения kp в установившихся динамических режимах, а, следовательно, большие динамические ошибки системы.
|
Дата добавления: 2014-01-07; Просмотров: 823; Нарушение авторских прав?; Мы поможем в написании вашей работы!