КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Системы бустерного управления
|
|
|
|
Система состоит из источника энергии, распределительного устройства, исполнительного механизма и обратной связи, передающей сигнал с выхода исполнительного механизма на вход распределительного устройства. Схема системы представлена на рис.2
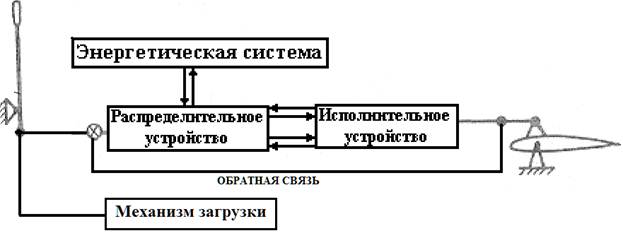
Рис.2 Схема бустерной системы
Бустеры
Конструктивно бустер (рис.3) состоит из кронштейна 1 и закрепленного на нем шарнирно силового цилиндра 2, силовой качалки 3, командного рычага 4, распределительного золотникового устройства, а также узлов и деталей, служащих для их соединения и для подсоединения гидроусилителя к самолетным тягам и гидросистемам.
Распределительное устройство (рис.2) состоит из двух одинаковых распределителей с двумя плоскими золотниками, каждый из которых служит для распределения рабочей жидкости в полости одной из камер двухкамерного цилиндра.
Распределитель включает в себя плоский золотник, состоящий из распределительной крышки 6, распределительного диска 7, опорной шайбы 8, плунжера 9 и прижимной пружины 10.
Работа бустера
При перемещении управляющей тяги (за счет отклонения ручки управления или педалей) командный рычаг 4 поворачивается относительно оси 5, далее движение через
Рис.3 Бустер
Подводимая к бустеру от гидросистемы энергия позволяет при незначительных усилиях, затрачиваемых на преодоление сил трения в золотниковом механизме, получать любые нужные нам усилия на штоке бустера, обеспечивая отклонение руля при любых по величине и по знаку шарнирных моментах. Это свойство бустера можно использовать для формирования на командных рычагах нормируемых усилий управления при любых размерах руля и любых скоростях полета.
Возможны два способа включения бустера в проводку управления - по обратимой или необратимой схеме.
|
|
|
В обратимой схеме включения бустера часть усилия от шарнирного момента руля воспринимается бустером, а оставшаяся, обычно меньшая часть, передается на командный рычаг летчика, обеспечивая ему естественное чувство управления.
В необратимой схеме включения бустера все усилие от шарнирного момента руля воспринимается бустером и до летчика не доходит.
Необратимая схема обеспечивает управление самолетом на любых скоростях полета и при любых размерах рулевых поверхностей. Она позволяет отказаться от аэродинамической компенсации рулевых поверхностей, что улучшает их аэродинамику. Жесткое защемление руля бустером способствует устранению рулевого флаттера, позволяя иногда отказаться от противофлаттерных грузов. Необратимая схема упрощает включение в систему управления разного рода автоматических устройств, особенно при использовании электродистанционного управления.
Для сохранения чувства управления при необратимом бустере к командным рычагам летчика подключаются специальные загрузочные механизмы, создающие искусственным путем усилия на этих рычагах.
На современных самолетах наибольшее распространение получили простые пружинные загрузочные механизмы (ЗМ).

Основным элементом такого механизма является пружина, помещенная в корпусе и связанная штоком с проводкой управления. Обычно ЗМ стараются поместить как можно ближе к командному рычагу и сократить путь передачи усилий от этого механизма до летчика. Жесткость пружины подбирается так, чтобы усилия при максимальных отклонениях руля не превышали допустимых. Зависимость усилий от углов отклонения руля в таком механизме линейна и совершенно не зависит от скоростного напора.
При балансировочных отклонениях руля в длительном полете на командных рычагах летчик будет ощущать усилия, пришедшие от ЗМ. Триммером снять их нельзя, т.к. шарнирный момент руля летчиком не воспринимается. Поэтому при необратимой схеме триммеры на рулях не ставятся.
|
|
|
Для снятия балансировочных усилий устанавливается электромеханизм, перемещающий точку крепления ЗМ. Перемещая эту точку, летчик расслабляет пружину и полностью снимает усилие на командном рычаге при заданном положении руля.

Такой механизм снятия балансировочных усилий получил название механизм триммерного эффекта.
Передача управляющих сигналов от летчика к органу управления может обеспечиваться электродистанционной системой управления (ЭДСУ).
Электродистанционная система управления (ЭДСУ, Fly-by-Wire) — система управления самолётом), обеспечивающая передачу управляющих сигналов от пилота (от РУС или педалей) к исполнительным механизмам в виде электрических сигналов.
(ЭДСУ) — система управления ЛА, в которой передача управляющих команд осуществляется в основном по электрическим линиям связи. Отказ от чисто механической проводки управления и необходимость перехода к ЭДСУ обусловлены внедрением автоматики в контур ручного (штурвального) управления ЛА. Автоматизация штурвального управления позволяет обеспечить не только оптимальные характеристики управляемости и устойчивости ЛА, но и заметно улучшить их лётно-технические характеристики за счёт использования аэродинамических схем с малым запасом продольной устойчивости или статически неустойчивых аэродинамических компоновок на дозвуковых скоростях полёта, что даёт возможность, например, уменьшить площадь стабилизирующих и управляющих поверхностей (то есть уменьшить массу ЛА).ЭДСУ позволяет повысить аэродинамическое качество ЛА путём более рационального распределения аэродинамических сил между крылом и управляющей поверхностью, а также снизить нагрузки на конструкцию. При наличии аэродинамической неустойчивости ЛА рулевые поверхности требуется отклонять главным образом по сигналам контура автоматики. В этих условиях переход на дистанционную (проводную) систему связей рычагов управления в кабине лётчика и вычислительных устройств контура автоматики с исполнительными приводами является наиболее естественным и рациональным решением в компоновке системы управления.
|
|
|
Типичная структура ЭДСУ имеет следующие основные элементы: датчики перемещений рычагов управления в кабине лётчика (в некоторых случаях — датчики усилий); датчики параметров движения ЛА (в первую очередь датчики угловых скоростей тангажа, крена и рыскания, датчики нормальной и боковой перегрузок, датчики угла атаки и угла скольжения); вычислительное устройство. В зависимости от возможностей вычислительных устройств контуров автоматики в ЭДСУ может также использоваться информация об углах тангажа и крена. Для регулировки коэффициента усиления цепей ЭДСУ в систему вводятся данные о скоростном напоре, высоте полёта, Маха числе и скорости полёта. В качестве вычислителей сложных многофункциональных систем управления используются цифровые вычислительные устройства, в которых реализуются требуемые законы управления.
К ЭДСУ предъявляются высокие требования по их надёжности, поскольку выход таких систем из строя приводит к потере устойчивости и управляемости ЛА, то есть к катастрофическим последствиям. Высокий уровень надёжности таких систем в целом достигается резервированием основных подканалов и элементов ЭДСУ. На практике используется 3- или 4-кратное резервирование и устанавливается специальная система встроенного контроля, которая в процессе всего полёта сравнивает сигналы всех подканалов ЭДСУ и выдаёт команду на отключение неисправного.
В электродистанционной системе сохраняются обычные командные посты управления или могут использоваться командные рычаги управления уменьшенных размеров - уменьшенная штурвальная колонка, рукоятка на подлокотнике и др. Механические перемещения командных рычагов в этой системе преобразуются в аналоговый или цифровой электросигнал, который передается электропроводкой к рулевому приводу, установленному непосредственно у рулевой поверхности и связанному силовым штоком с ее кабанчиком управления. Перемещение силового привода управляется электросигналами командного рычага и за счет обратной связи создается следящая система, в которой руль строго следит за перемещениями командного рычага точно так же, как это происходит в системах с механической проводкой управления.
|
|
|
В состав канала ЭДСУ входят:
¾ ручка управления самолетом с участком жесткой проводки до загрузочного механизма;
¾ датчик положения ручки, осуществляющий преобразование механического перемещения ручки в электрический сигнал;
¾ вычислитель;
¾ электрожгуты (линии связи);
¾ электрогидравлический РП;
¾ датчики параметров полета;
¾ система контроля.
Основное отличие ЭДСУ заключается в том, что комплексирование сигналов от разных систем (летчика, системы устойчивости и управляемости, САУ) осуществляется вычислителем на основе электрических сигналов.
Существует ряд проблем, связанных с применением ЭДСУ:
недостаточная надежность электронных элементов;
необходимость обеспечения бесперебойного питания. Электропитание должно быть резервированным. При этом если ЭДСУ не резервирована механической или гидромеханической системами, должно быть исключено полное, даже кратковременное (менее 0,1с) обесточивание системы;
обеспечение электромагнитной совместимости с бортовым комплексом самолета и др.
К примеру, на самолете Ту-204 применяются в системе управления рулями контуры управления: основной электродистанционный; резервный электродистанционный; аварийный электродистанционный; аварийный механический.
Электродистанционная проводка управления обеспечивает снижение массы системы управления, практически не требует объемов для ее прокладки, проста и удобна в обслуживании. ЭДСУ упрощает включение в систему управления любых автоматических устройств, не требуя установки дополнительных силовых приводов. Это позволяет создавать единую автоматизированную бортовую систему - АБСУ, обеспечивающую высокое качество управления на всех режимах полета самолета. В такой системе сигналы летчика и автоматов суммируются на электрическом уровне и выдаются на единый силовой привод органа управления.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1158; Нарушение авторских прав?; Мы поможем в написании вашей работы!