КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 1. Характеристика дисциплины и ее роль в подготовке специалиста. Датчики, информационно-измерительные системы и комплексы в приборном оборудовании летательных аппаратов
|
|
|
|
Модуль 1. АВИАЦИОННЫЕ ПРИБОРЫ И ДАТЧИКИ
3.
2.
1.
Свойства проекции вектора
Проекция вектора на ось
Векторное пространство
Условие равенства и коллинеарности векторов в координатной форме
ТЕОРЕМА 7: Два вектора и равны когда их координаты равны:; Два вектора коллинеарны соответствующие координаты пропорциональны:.
Доказательство:
Пусть тогда по Т.1 существует такое число, что. Но по Т6 имеем:. Откуда:.
Пусть.
ВЕКТОРНОЕ ПРОСТРАНСТВО – есть множество произвольных элементов, называемых векторами, удовлетворяющее аксиомам векторного пространства:
1). Для любых векторов из определён вектор, называемой суммой при этом:
·
·
2). В множестве векторов имеется нулевой вектор 0
3). Каждому вектору имеется ему противоположный «», такой, что:,
4). Для каждого вектора определён вектор, называемый произведением вектора на действительное число, обладающий свойствами:
·
·
·
Проекцией точки М на ось называется основание перпендикуляра, опущенного на эту ось из точки М.
Проекцией вектора на ось называется число, равное длине вектора, заключённого между проекциями начала А и конца В вектора, причём эта длина берётся с (+), если вектор и ось одинаково направлены и с отрицательным знаком (-), если направление и ось направлены в противоположные стороны
Проекция вектора – есть величина скалярная.
· Под УГЛОМ МЕЖДУ ВЕКТОРОМ И ОСЬЮ понимается угол между вектором и ортом оси
· Под УГЛОМ МЕЖДУ ДВУМЯ ВЕКТОРАМИ понимается тот угол, который не превосходит.
Т.к., то для проекций имеем:
Треугольник подобен треугольнику, откуда следует, что:
Свойства 2 и 3 означают, что линейные операции над векторами приводят к соответствующим операциям над их проекциями. Т.е. свойства для векторов переносятся на свойства для проекций.
|
|
|
Раздел 1. ОБЩИЕ СВЕДЕНИЯ ОБ АВИАЦИОННЫХ ПРИБОРАХ, ИЗМЕРИТЕЛЬНО-ВЫЧИСЛИТЕЛЬНЫХ СИСТЕМАХ И КОМПЛЕКСАХ
Развитие и эффективность применения авиационной техники неразрывно связаны с совершенствованием бортовых средств информационного обеспечения процесса пилотирования летательных аппаратов. Усложнение и улучшение летно-технических характеристик авиационной техники, увеличение скоростей, дальности и высот полета, расширение круга выполняемых функциональных задач и возрастающие требования к безопасности полетов определяют значительное повышение требований к точности и быстродействию средств измерения и определения пилотажных, навигационных и других параметров движения, режимов работы силовой установки, агрегатов и отдельных систем.
Необходимость учета многочисленных факторов и случайных возмущений, использование принципов оптимальной фильтрации и комплексирования, широкое применение для обработки, преобразования и отображения информации средств вычислительной техники обусловили выделение в составе приборного оборудования летательных аппаратов измерительно-вычислительных систем и комплексов различного назначения. Измерительно-вычислительные системы решают задачи восприятия и измерения первичных информативных сигналов, автоматического сбора, передачи и совместной обработки измерительной информации, выдачи результатов в форме, удобной для восприятия экипажем, ввода в системы автоматического управления, подачи в другие технические системы летательного аппарата.
Подготовка специалистов в области разработки производства и эксплуатации авиационных приборов и датчиков, измерительно-вычислительных систем и приборных комплексов предусматривает изучение методов измерения пилотажных и навигационных параметров полета, параметров режима работы силовой установки и агрегатов, параметров состояния окружающей среды, принципов построения и формирования первичных информативных сигналов, алгоритмов обработки информации в измерительных каналах, статических и динамических характеристик и погрешностей, путей повышения точности и направлений совершенствования бортовых авиационных приборов, измерительно-вычислительных систем и комплексов самолетов и вертолетов, раскрываемых в рамках данного учебного пособия.
|
|
|
Учебное пособие позволяет обоснованно проводить инженерные расчеты, анализ и синтез измерительных каналов авиационных приборов, измерительно-вычислительных систем и комплексов различного назначения на этапах технического предложения, эскизного и технического проектирования с привязкой к реальным объектам авиационной техники.
Необходимость в получении информации о состоянии того или иного процесса или объекта возникает во всех областях науки и техники при проведении различных физических экспериментов, при контроле производственных и технологических процессов, при управлении движущимися объектами и т. п. При этом измерения являются основным методом, позволяющим получить первичную количественную информацию о величинах, характеризующих изучаемый или контролируемый объект или процесс. Информация, получаемая в результате измерений, называется измерительной информацией. При этом важную роль играет точность измерения, которая непосредственно зависит от точности измерительного устройства, являющегося техническим средством получения информации о контролируемом процессе.
Точность измерительного устройства определяется его принципом действия, структурным построением, выбором конструктивных параметров функциональных элементов, мероприятиями, используемыми для снижения статических и динамических погрешностей и другими особенностями его реализации.
Для обеспечения заданной точности измерительных устройств необходимо уже на этом этапе проектирования проводить исследование по выбору структуры и параметров, выявлению и последующему учету внешних и внутренних дестабилизирующих факторов, использованию эффективных методов по устранению их влияния на качество работы измерительного устройства.
|
|
|
Термины и определения основных понятий в области измерений, измерительных приборов и систем нормированы РМГ 29-99 и ГОСТ Р8.596-2002.
Измерением называется нахождение значения физической величины опытным путем с помощью специальных технических средств.
Результат измерения есть значение физической величины, найденной путем ее измерения.
Измерительная информация – это количественная оценка состояния материального объекта, получаемая экспериментально, путем сравнения параметров объекта с мерой (овеществленной единицей измерения).
Измерения основаны на некоторой совокупности физических явлений, представляющих собой принцип измерений. Они осуществляются при помощи технических средств измерений, используемых при измерениях и имеющих нормированные метрологические параметры.
Средства измерений делятся на меры, измерительные преобразователи, измерительные приборы, измерительные установки и измерительные системы (информационно – измерительные системы).
Мера – средство измерений, предназначенное для восприятия физической величины заданного размера (например, единицы измерения, ее дробного или кратного значения). Пример меры – мерная линейка (метр), являющейся мерой длины.
Измерительный преобразователь – средство измерений для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и (или) хранения, но не поддающейся непосредственному восприятию наблюдателем.
По месту расположения измерительного преобразователя в общей структуре прибора, устройства или системы выделяют первичный измерительный преобразователь, вторичный и т. д., включая выходной измерительный преобразователь.
По принципу действия различают термоэлектрический, механический, пневматический и т. д. измерительные преобразователи.
По виду основного информативного сигнала или по характеру измерительного преобразования сигналов различают, например, резистивный, индуктивный, емкостной, пневмоэлектрический.
|
|
|
По варианту исполнения и форме преобразуемых сигналов преобразователя выделяют электронные, аналоговые, цифровые и т. п. измерительные преобразователи.
Кроме термина "измерительный преобразователь" используется близкий к нему термин – "датчик".
Датчик – это один или несколько измерительных преобразователей, служащих для преобразования измеряемой неэлектрической величины в электрическую и объединенных в единую конструкцию.
Термин датчик обычно применяют в сочетании с физической величиной, для первичного преобразования которой он предназначен: датчик давления, датчик температуры, датчик скорости и т. д.
Измерительный прибор – средство измерений, предназначенное для выработки сигнала измерительной информации в форме, доступной для непосредственного восприятия наблюдателем.
Измерительная установка – совокупность функционально объединенных средств измерений, предназначенная для выработки нескольких сигналов измерительной информации в форме, удобной для непосредственного восприятия наблюдателем и расположенная в одном месте. Измерительная установка может содержать в своем составе меры, измерительные приборы, а также различные вспомогательные устройства.
Измерительная система – это совокупность средств измерений (мер, измерительных приборов, измерительных преобразователей) и вспомогательных устройств, соединенных между собой каналами связи, предназначенная для выработки сигналов измерительной информации в форме, удобной для автоматической обработки, передачи и (или) использования в автоматических системах управления.
В связи с переходом к получению и использованию результатов многократных измерений, представляющих из себя поток измерительной информации о множестве однородных или разнородных измеряемых величин, возникла проблема их восприятия и обработки за ограниченное время, создания средств, способных разгрузить человека (экипаж) от необходимости сбора, обработки и представления в форме, доступной для восприятия и ввода в устройства управления или другие технические системы. Решение этой проблемы привело к появлению нового класса средств измерения, предназначенных для автоматизированного сбора информации от объекта, преобразования ее, обработки и раздельного или интегрального (обобщенного) представления. Такие средства (и не только бортовые) вначале получили название информационно – измерительные системы или измерительные информационные системы (ИИС). В последние годы все более часто их называют измерительно-вычислительными системами (ИВС).
Информационно – измерительные системы и измерительно-вычислительные системы – это совокупность функционально объединенных измерительных, вычислительных и других вспомогательных технических средств для получения измерительной информации, ее преобразования, обработки в целях представления потребителю (в том числе ввода в автоматические системы управления) в требуемом виде, либо автоматического осуществления логических функций контроля, диагностики, идентификации.
В общем случае под ИИC (ИВС) понимают системы, предназначенные для автоматического получения количественной информации от изучаемого (контролируемого) объекта путем процедур измерения и контроля, обработки этой информации по определенному алгоритму и выдачи ее в форме, удобной для восприятия или последующего использования для управления объектом и решения других задач.
В составе ИИС и ИВС объединяются технические средства, начиная от датчиков и задатчиков и кончая устройствами выдачи информации, а также все алгоритмы и программы, необходимые как для управления работой системы, так и позволяющие решать измерительные, вычислительные и вспомогательные задачи.
Возможно объединения измерительных, информационно – измерительных и измерительно-вычислительных систем в измерительные, информационно – измерительные и измерительно-вычислительные комплексы в целях обеспечения совместной (комплексной) обработки их информации с необходимой точностью и надежностью.
Лекция 2. Назначение и классификация авиационных приборов и систем
В виду многообразия типов и областей применения измерительных приборов и систем их назначение и признаки классификации рассмотрим на примере авиационных приборов и измерительных систем.
Как отмечается в работе, авиационные приборы и измерительные системы обеспечивают на борту измерение большого числа параметров, характеризующих режим полета самолета. В ходе полета эти параметры непрерывно изменяются. Информация о параметрах режимов полета используется для ручного или автоматического управления полетом, для контроля режимов работы силовых установок, определения параметров окружающей среды и т. п.
Движение самолета как твердого тела в пространстве состоит из поступательного движения (движения центра масс) и углового движения (движение вокруг центра масс). Положение центра масс самолета (точка O, рис. 1.1) относительно заданной системы отсчета OX 0 Y 0 Z 0 определяется линейными координатами: H – высотой полета; L – пройденным расстоянием; Z – боковым отклонением. Система OX д Y д Z д движется поступательно с центром масс самолета.
Рис. 1.1. Координаты поступательного движения центра масс самолета
Высота измеряется по вертикали между самолетом и поверхностью, принятой за начало отсчета. Различают абсолютную, относительную, истинную высоты. Абсолютная высота H отсчитывается от уровня моря, относительная высота H отн отсчитывается от некоторого выбранного уровня, например от места взлета или посадки; истинная высота H ист отсчитывается от места, над которым находится самолет в данный момент времени.
Для определения углового положения самолета в пространстве вводится связанная система координат OXYZ (рис. 1.2). Ось OX направлена по продольной оси самолета. Ось OY расположена в плоскости симметрии и перпендикулярна оси OX. Ось OZ направлена в сторону правого крыла, перпендикулярна плоскости симметрии. Угловое положение самолета определяется тремя углами Эйлера (угловыми координатами): Dψ, υ, g. Угол Δψ между осью OX д и проекцией связанной оси OX на горизонтальную плоскость X д OZ д называется углом рыскания. Угол υ между связанной осью OX и горизонтальной плоскостью называется углом тангажа. Угол γ между плоскостью симметрии самолета XOY и вертикальной плоскостью, проходящей через связанную ось OX, называется углом крена.
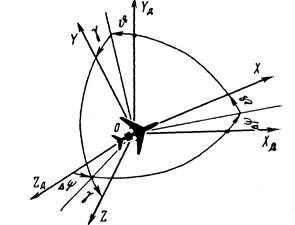
Рис. 1.2. Координаты углового движения самолета относительно центра масс
Направление полета самолета относительно земной системы координат определяется курсом ψ самолета, представляющим собой угол, отсчитываемый по часовой стрелке между направлением меридиана и проекцией продольной оси самолета на плоскость горизонта. В зависимости от меридиана, используемого в качестве линии отсчета (географический, магнитный, компасный), различают (рис. 1.3) истинный ψ, магнитный ψм и компасный ψк курсы. Магнитный курс ψм отличается от истинного курса ψ на величину магнитного склонения Δм, компасный курс ψк от магнитного курса ψм – на величину магнитной девиации Δк.
На практике курс измеряют также относительно ортодромии (ортодромический курс ψо). При этом под ортодромией понимают дугу большого круга, плоскость которого проходит через центр Земли.
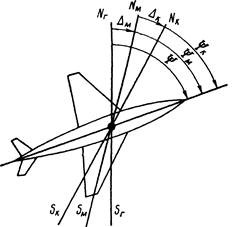
Рис.1.3. Истинный, магнитный и компасный курсы самолета
Кроме линейных (H, L, Z) и угловых (Δψ, u, g, ψ) координат используются параметры, характеризующие движение самолета по отношению к набегающему потоку воздуха. Для этой цели вводится скоростная система координат OX а Y а Z а (рис. 1.4), связанная с вектором  скорости движения самолета относительно воздушной среды, называемой истинной воздушной скоростью. Направление оси OX а скоростной системы координат OX а Y а Z а совпадает с направлением вектора . Ось OY а перпендикулярна оси OX а и расположена в вертикальной плоскости, проходящей через ось OX а. Ось OZ а перпендикулярна плоскости X а OY а и направлена в сторону правого крыла.
скорости движения самолета относительно воздушной среды, называемой истинной воздушной скоростью. Направление оси OX а скоростной системы координат OX а Y а Z а совпадает с направлением вектора . Ось OY а перпендикулярна оси OX а и расположена в вертикальной плоскости, проходящей через ось OX а. Ось OZ а перпендикулярна плоскости X а OY а и направлена в сторону правого крыла.
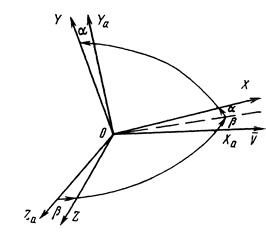
Рис. 1.4. Положение скоростной системы координат
по отношению к связанной системе
Положение скоростной системы координат OX а Y а Z а по отношению к связанной системе координат OXYZ определяется углами a и b (рис. 1.4).
Угол a между проекцией вектора истинной воздушной скорости на плоскость симметрии самолета (XOY) и связанной осью OX называется углом атаки. Угол b между вектором истинной воздушной скорости и плоскостью симметрии самолета XOY называется углом скольжения.
В самолетовождении кроме истинной воздушной скорости используются также такие скорости полета, как индикаторная (приборная), путевая и вертикальная. Индикаторная скорость V и – это истинная воздушная скорость, приведенная к нормальной (массовой) плотности воздуха. Путевая скорость V п – это горизонтальная составляющая скорости движения летательного аппарата относительно земли. При наличии ветра путевая скорость равна геометрической сумме горизонтальных составляющих истиной воздушной скорости и скорости ветра. Вертикальная скорость V в – это вертикальная составляющая скорости движения самолета относительно земли. Безразмерной характеристикой скорости полета самолета является число M, равное отношению истинной воздушной скорости к местной скорости звука.
В целях обеспечения требуемого качества управления движением по траектории в ряде случаев необходимо измерять производные линейных и угловых координат: угловые скорости и ускорения относительно связанных осей (w x, w y, w z,  ), линейное ускорение j по направлению связанной оси.
), линейное ускорение j по направлению связанной оси.
Режим работы силовой установки характеризуется комплексом параметров, определяющих тягу P т, удельный расход топлива G уд. т, температурную и динамическую напряженность его деталей и устойчивость работы. К этим параметрам относят степень повышения давления в компрессоре П к *, температуру газов T з * перед турбиной, расход G в воздуха через двигатель, давление и скорость воздуха и газов по тракту двигателя и т.п.
Основными из отмеченных параметров являются величины T з * и П к *. В рабочих режимах обычно ограничиваются условием П к*=const; T з*= const. При неизменных параметрах внешних условий величина П к * пропорциональна частоте вращения n в единицу времени. Поэтому в качестве измеряемых параметров при определении тяги, удельного расхода топлива, динамической и температурной напряженности деталей двигателя используют параметры n и T з*. Параметры n и T з* можно регулировать изменением расходов G т основного и G ф форсажного топлива, площади реактивного сопла, а также изменением угла установки лопаток направляющего аппарата компрессора.
В связи с тем, что условия работы приборов на самолете отличаются от условий работы приборов на земле разнообразием и сложным сочетанием различных внешних факторов, влияющих на работу приборов, к измеряемым на самолете параметрам относят также параметры окружающей среды и механических воздействий (вибраций, перегрузок).
Основные параметры, характеризующие режимы полета самолета и их измерители приведены в табл. 1.1.
Измерители основных параметров полета Таблица 1.1
| Наименование параметра | Обозначение | Применяемый параметр |
| Пилотажно-навигационные параметры | ||
 Углы:
рыскания
тангажа
крена
курса
Истинная воздушная скорость
Индикаторная скорость
Число Маха
Путевая скорость
Высота полета
Боковое отклонение
Пройденное расстояние
Вертикальная скорость
Угол атаки
Угол скольжения
Угловая скорость
Угловое ускорение
Линейное ускорение
Угол сноса
Перегрузка Углы:
рыскания
тангажа
крена
курса
Истинная воздушная скорость
Индикаторная скорость
Число Маха
Путевая скорость
Высота полета
Боковое отклонение
Пройденное расстояние
Вертикальная скорость
Угол атаки
Угол скольжения
Угловая скорость
Угловое ускорение
Линейное ускорение
Угол сноса
Перегрузка
|
D ψ
u
γ
ψ, ψм, ψк, ψо
V
V и
M
V п
H, H ист, H отн
Z
L
V в
α
β
ω
 j
βс
n п
j
βс
n п
| Гирополукомпас, курсовая система Авиагоризонт, гировертикаль Авиагоризонт, гировертикаль Гироиндукционный компас, курсовая система Измеритель скорости, система воздушных сигналов Измеритель скорости, система воздушных сигналов Система воздушных сигналов Доплеровский измеритель скорости и угла сноса Корректор высоты, система воздушных сигналов Автоматическое навигационное устройство, навигационное вычислительное устройство Вариометр, дифференцирующее устройство Датчик угла атаки Датчик угла скольжения Датчик угловой скорости Дифференцирующее устройство Датчик линейных ускорений Доплеровский измеритель скорости и угла сноса Датчик перегрузок |
| Таблица 1.1 (продолжение) | ||
| Наименование параметра | Обозначение | Применяемый параметр |
| Параметры режимов работы силовых установок | ||
 Частота вращения
Температура в двигателе:
перед турбиной
за турбиной
масла
воздуха
Давление в двигателе:
топлива
масла
за компрессором
в воздухозаборнике
Перепад давлений на турбине
Расход топлива:
основного
форсажного
Количество топлива в баках:
объемное
весовое
Крутящий момент
Тяга двигателя
Амплитуда вибрации
Частота вибрации Частота вращения
Температура в двигателе:
перед турбиной
за турбиной
масла
воздуха
Давление в двигателе:
топлива
масла
за компрессором
в воздухозаборнике
Перепад давлений на турбине
Расход топлива:
основного
форсажного
Количество топлива в баках:
объемное
весовое
Крутящий момент
Тяга двигателя
Амплитуда вибрации
Частота вибрации
| n
 T з *
T 4
T м
T в T з *
T 4
T м
T в
 P м
P к
P пр
εт
P м
P к
P пр
εт
 G т
G ф
V т
G т
M кр
P т
a в
f в G т
G ф
V т
G т
M кр
P т
a в
f в
| Измеритель частоты вращения Термометры Манометры Дифманометр Расходомеры Топливомеры Моментомер Измеритель тяги Аппаратура для измерения параметров вибрации |
Таблица 1.1 (продолжение)
| Наименование параметра | Обозначение | Применяемый параметр |
| Параметры окружающей среды | ||
 Параметры атмосферы:
плотность
относительная
плотность
температура
давление
влажность
скорость ветра Параметры атмосферы:
плотность
относительная
плотность
температура
давление
влажность
скорость ветра
| ρ Δп T р χ W | Плотномеры Термометр Манометр (барометр) Гигрометр Измеритель скорости |
Авиационные приборы и измерительные системы можно классифицировать по назначению, принципу действия, дистанционности и способу воспроизведения измеряемой величины.
По назначению приборы и системы подразделяют на пилотажно – навигационные приборы и системы, приборы контроля работы силовых установок, приборы для измерения параметров окружающей среды и приборы контроля за работой отдельных систем и агрегатов самолета.
По принципу действия приборы могут быть механическими, электрическими, гидравлическими, оптическими и др., а также комбинированными (электромеханическими и т. п.).
По способу управления приборы разделяют на недистанционные и дистанционные. Для дистанционного прибора характерно наличие линии связи, соединяющей разнесенные на некоторое расстояние датчик и индикатор. Линия связи может быть электрической, оптической, механической, пневматической, гидравлической.
По способу воспроизведения измеряемой величины приборы могут быть: с непосредственной выдачей информации, регистрирующими и измерительными преобразователями (датчики). Приборы с непосредственной выдачей информации подразделяют: на приборы с индикацией информации в виде цифровых или аналоговых данных; на приборы с выдачей изображения в виде силуэта самолета, экрана с картой обстановки и т. п.; на приборы, выдающие информацию в виде световых табло с надписями; на приборы, выдающие информацию в виде звукового сигнала, и др.
Регистрирующие приборы фиксируют информацию непрерывно на бумаге, магнитных лентах или дискретно с помощью печатающего устройства.
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1026; Нарушение авторских прав?; Мы поможем в написании вашей работы!