КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Упреждающее управление по опорному значению
|
|
|
|
Простейшая система управления реагирует только на ошибку e(t) и не использует по отдельности два входных сигнала — опорное значение и выходной параметр процесса.
Однако ошибка может возникнуть по двум причинам, одна из которых — изменение опорного или задающего сигнала uc(t), а вторая — изменение нагрузки или какое-либо другое возмущение в системе, вызывающее изменение выходного сигнала y(t). Изменение опорного значения — это известное возмущение. Если регулятор может использовать соответствующую информацию, то это, вообще говоря, позволяет улучшить характеристики замкнутой системы — физический процесс и регулятор. В этом смысл упреждающего управления.
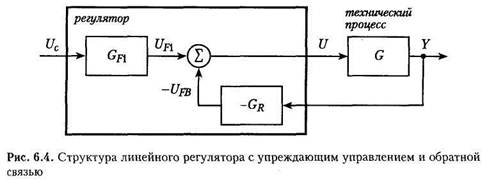
Рассмотрим регулятор [уравнение (6.4)], состоящий из двух частей. Контур обратной связи GpB(s) представляет собой исходный регулятор, отрабатывающий ошибку е. Так называемый контур упреждения GFF(s) контролирует изменения опорного значения и прибавляет к управляющему сигналу поправочный член, с тем чтобы вся система реагировала более оперативно на изменения опорного сигнала (рис. 6.3). То есть управляющий процессом сигнал U(s) представляет собой сумму двух сигналов

|

Это выражение можно переписать в виде

где UFi — упреждающий сигнал по опорному значению (задающему воздействию), a Upg — сигнал обратной связи. Регулятор имеет два входных сигнала Uc(s) и Y(s) и, следовательно, может быть описан двумя передаточными функциями Gp^(s) и G^(s) (рис. 6.4).

|
| Это выражение можно преобразовать следующим образом |
|
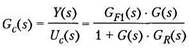
Поскольку регулятор, соответствующий уравнению (6.4), имеет больше настраиваемых коэффициентов, чем простейший регулятор уравнения (6.3), разумно предположить, что замкнутая система имеет лучшие характеристики. Передаточную функцию полного контура управления можно получить из рис. 6.4
|
|
|
Положение полюсов системы с обратной связью можно изменить с помощью регулятора GR(s), а упреждающий регулятор GFi(s) добавляет системе новые нули. Отсюда следует, что вся система может быстро реагировать на изменения опорного сигнала, если GFy(s) выбрана должным образом.
Пропорционально-интегрально-дифференциальный (ПИД) регулятор — наиболее распространенная структура регулятора в управлении процессами и сервомеханизмами. Поэтому он будет подробно рассмотрен в нескольких следующих разделах.
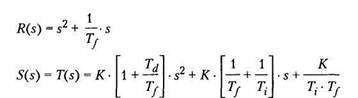
Параметры полиномов R(s), S(s) и T(s) можно выбрать при этом таким образом, что

|
ПИД-регулятор вырабатывает выходной сигнал, являющийся суммой трех составляющих пропорционального регулирования, регулирования по интегралу и регулирования по производной. Первая часть Up(t) пропорциональна ошибке выходной величины, т. е. разности между выходной величиной и опорным значением, вторая часть Uj(t) — интегралу по времени ошибки выходной величины, а третья часть uD(t) — производной ошибки.
Уравнение классического ПИД-регулятора имеет вид
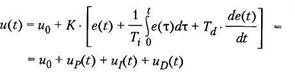
Параметр К — усиление регулятора, Ti — постоянная времени интегрирования, a Td — постоянная времени дифференцирования. Коэффициент U0 есть поправочное значение или смещение, настраивающее средний уровень выходного сигнала регулятора.
Некоторые регуляторы, особенно старые модели, вместо усиления имеют настройку полосы пропорциональности, которая определяется как РВ = 100/К и обычно выражается в процентах. Это определение справедливо лишь в том случае, если К безразмерно.
Постоянная времени интегрирования Ti присутствует в знаменателе уравнения (6.12) — таким образом, значения отдельных слагаемых уравнения регулятора оказываются соизмеримы. Подтверждение этому хорошо видно из переходной характеристики пропорционально-интегрирующего (ПИ) регулятора. Немедленно после скачка ошибки e(t) на выходе регулятора имеем К* е. По прошествии времени Ti выходная величина регулятора становится вдвое больше (рис. 6.9). ПИ-регулятор часто символически изображается его переходной характеристикой.
|
|
|

Регулятор можно также описать с помощью преобразования Лапласа. Применяя его к уравнению (6.12), получим
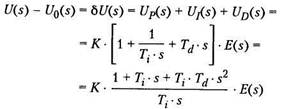
где E(s) — изображения Лапласа для компонент сигнала up(t), uI(t) и uD(t) соответственно. Степень числителя превосходит степень знаменателя, поэтому усиление регулятора стремится к бесконечности при высоких частотах — это следствие дифференциальной составляющей. На практике дифференцирование нельзя выполнить точно, поэтому используется аппроксимация первого порядка с постоянной времени TD и уравнение ПИД-регулятора принимает вид

ПИД-регулятор представляет собой частный случай обобщенного регулятора [уравнение (6.7)] и может быть выражен через полиномы R, S и Т. Уравнение (6.14) можно переписать в виде

В результате получим ПИД-регулятор
В действительности большинство технических процессов имеют порядок выше, чем второй, однако ПИД-регуляторы часто можно успешно использовать и для управления такими процессами. Это связано с тем, что многие процессы, имеющие в действительности динамику более высокого порядка, приближенно ведут себя подобно системам второго порядка. В системах, которые нельзя аппроксимировать уравнениями второго порядка, применение ПИД-регуляторов не рекомендуется. В частности, это относится к механическим системам, имеющим несколько колебательных составляющих движения.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 904; Нарушение авторских прав?; Мы поможем в написании вашей работы!