КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Оценка точности САР в установившемся режиме
|
|
|
|
Оценка качества регулирования
Под качеством регулирования понимается способность САР поддерживать заданный закон регулирования с определенной точностью. При этом точность оценивается как в установившемся, так и в переходном режимах. Поэтому при оценке качества регулирования решаются две задачи:
- оценка точности в установившемся режиме;
- оценка качества регулирования в переходном режиме.
Ошибка регулирования в установившемся режиме определяется по выражению
 , (5.1)
, (5.1)
где D y0 – ошибка воспроизведения задающего воздействия y *(t); D yf – ошибка, создаваемая возмущающими воздействиями. В курсе лекций подробно рассматривается только D y0.
Точность САР в установившемся режиме зависит от статизма системы.
Регулирование называется статическим, если установившееся после окончания переходного процесса значение регулируемой y (t) при различных постоянных значениях задающего воздействия y* (t), также принимает различные постоянные значения, зависящие от величины y* (t). Другими словами, статический регулятор поддерживает не строго постоянное значение регулируемой переменной, а с некоторой ошибкой
 , (5.2)
, (5.2)
где y *(t0) – постоянное значение задающего воздействия, измененное в момент времени t0; y (¥) – установившееся значение. Величина D ст называется статической (установившейся) ошибкой, которая, в общем случае, рассматривается как остаточное отклонение регулируемой переменной y (t) после окончания переходного процесса. На рис. 5.1 приведены кривые, характеризующие появление статической ошибки.
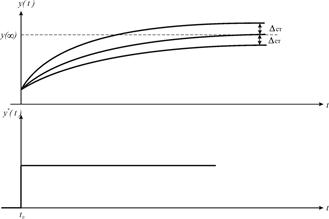
Рис. 5.1. Кривые переходного процесса, характеризующие появление статической ошибки
В некоторых САР статическая ошибка нежелательна, т.е. необходимо, чтобы D ст =0. Это достигается использованием астатического регулирования. Регулирование называется астатическим, если в установившемся режиме поддерживается постоянное значение регулируемой переменной, равное задающему воздействию, независимо от величины этого воздействия. Для получения астатического регулирования необходимо устранить жесткую связь между положением регулирующего органа и значением регулируемой переменной с тем, чтобы заданное значение регулируемой переменной можно было поддерживать при любой нагрузке. Это достигается введением в цепь астатических (интегрирующих) звеньев.
|
|
|
При произвольном изменении задающего воздействия y* (t) ошибка регулирования в установившемся режиме представляет собой медленно изменяющуюся во времени функцию D y (t). Эту функцию можно представить в виде следующего ряда:
 , (5.3)
, (5.3)
где с0, с1, с2,… называются коэффициентами ошибок по задающему воздействию.
Для определения коэффициентов ошибок используется передаточная функция ошибки по задающему воздействию:
 , (5.4)
, (5.4)
где Wp (p) – передаточная функция разомкнутой части САР. Отсюда имеем, что:
 (5.5)
(5.5)
Коэффициент с0 называется коэффициентом статической ошибки. Коэффициент с0 в статической САР  , а в астатической САР
, а в астатической САР  , где kp – коэффициент передачи разомкнутой части САР.
, где kp – коэффициент передачи разомкнутой части САР.
Коэффициент c1 называется коэффициентом скоростной ошибки, который в астатической САР первого порядка:  , где kv коэффициент передачи разомкнутой части САР по скорости.
, где kv коэффициент передачи разомкнутой части САР по скорости.
Коэффициент с2 называется коэффициентом ошибки от ускорения, который в астатической САР второго порядка:  , где kа коэффициент передачи разомкнутой части САР по ускорению.
, где kа коэффициент передачи разомкнутой части САР по ускорению.
Особенность коэффициентов ошибок состоит в том, что с увеличением коэффициента передачи разомкнутой части САР уменьшаются все виды ошибок, т.е. статическая, скоростная и от ускорения. Предельное значение коэффициента передачи разомкнутой части САР определяется условиями устойчивости системы.
|
|
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 937; Нарушение авторских прав?; Мы поможем в написании вашей работы!