КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Отображение алфавитно-цифровой информации на пульте
|
|
|
|
Рассмотрим достаточно типичный вариант реализации пользовательского пульта, в котором необходимо предоставлять пользователю для визуального контроля значения ряда параметров процесса управления, возможно, снабженные некоторыми текстовыми пояснениями (например, для явного указания наименования отображаемого параметра). Для этих целей необходимо устройство индикации, позволяющее выводить цифровую и символическую информацию, при этом, как правило, многоразрядную. Практически стандартным, экономичным и легко реализуемым решением является использование для этих целей жидкокристаллических индикаторов — ЖКИ (к исключениям следует отнести условия эксплуатации с широким диапазоном изменения освещенности, для которых предпочтительнее использование све- тоизлучающих мнемосхем). В силу широты круга задач отображения информации во встраиваемых системах, покрываемых алфавитно-цифровыми ЖКИ, рассмотрим именно такой вариант реализации (применение графических ЖКИ, несколько более громоздкое схемотехнически и программно, принципиально мало отличается по решению от описываемого далее примера).
При построении замкнутых систем управления электромеханическими объектами, позволяющих отработать уставки оператора путем определения величины управляющего воздействия как функции от заданного и текущего состояния объекта, необходимо измерение этого состояния путем использования датчиков обратной связи: по частоте вращения, по моменту сопротивления, по положению и др. Рассмотрим подсистему измерения значений первых двух из указанных параметров.
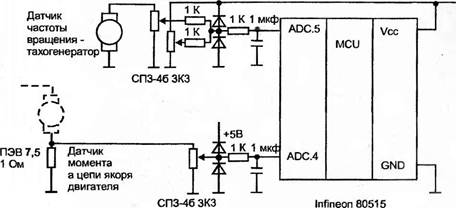
Аппаратная реализация подсистемы вывода показана на рис.. В качестве датчика частоты вращения использован тахогенератор (здесь будем г оворить о некотором абстрактном тахогеператоре; в каждом конкретном случае целесообразно выбирать наиболее полно соответствующий параметрам электромеханической системы, в частности, по значению максимальной частоты вращения). В простейших случаях в качестве тахогенератора может быть использован использован двигатель постоянного тока, включенный в режиме генератора. В качестве датчика момента используется образцовый резистор, падение напряжения на котором пропорционально току якорной обмотки двигателя (исполнительного или нагрузочного); сила этого тока, в свою очередь, пропорциональна величине момента на валу ротора. В связи с тем, что значения уровней выходных напряжений этих датчиков достаточно велики, необходимое масштабирование сигналов, как правило, сводится к пропорциональному снижению их амплитуды резистивными делителями до диапазона 0...5 В, применяемого в АЦП.
+5В
VD1-VD4 КД507
Рис Схема устройства сопряжения с датчиками
Требуемый коэффициент деления определяется при настройке подбором положения ползунка реостата (в случае необходимости сужения диапазона измерений можно применить соответствующие настройки АЦП). Так как ротор исполнительного двигателя может вращаться в обоих направлениях, выходное напряжение тахогенератора в штатном режиме может быть отрицательным, что недопустимо для входов АЦП МК. В схеме обработки сигналов канала АЦП 5 применен пассивный сумматор, "поднимающий" масштабированное напряжение тахогенератора на величину +2,5 В (половина полного диапазона измеряемых напряжений), точно задаваемую с помощью потенциометра. Напряжение тахогенератора должно быть смасштабировапо так, чтобы в рабочем диапазоне частот -Wmax...+Wmax оно находилось в пределе 2,5...+2,5 В. При этом Ubx АЦП будет находиться в диапазоне 0...5 В. для защиты микроконтроллера от повреждений при возможных аварийных режимах (резкие увеличения значений частоты и/или тока, приводящие к превышению выхода напряжения Ubx АЦП за границы диапазона 0...+5 В) используются диоды, открывающиеся при снижении входного напряжения ниже величины -0,4 В (нижний диод пары) и при превышении входным напряжением величины +5,4 В (верхний диод пары). Возможные помехи, наводимые электромагнитными полями электрических машин, отфильтровываются RC-цепями.
|
|
|
|
|
Дата добавления: 2014-12-10; Просмотров: 553; Нарушение авторских прав?; Мы поможем в написании вашей работы!