КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Управление асинхронными двухфазными двигателями
Особенностью управления двигателями данного типа является необходимость привязки начала периода управляющего напряжения к началу периода питающего; при этом оба напряжения изменяются по гармоническому закону.
Типовым методом организации управления асинхронными двухфазными двигателями (АДД) является использование тиристорного ключа, открываемого на заданную долю периода и коммутирующего тем самым на обмотку управления заданную долю мощности от максимальной. Таким образом, задача программы управления АДД состоит в расчете величины временного сдвига относительно начала каждого очередного периода, обеспечивающей требуемую мощность(частоту вращения), определении начала очередного периода, выдержке рассчитанного интервала времени и генерации сигнала, управляющего тиристорным ключом. Идеальные временные диаграммы, характеризующие такое тиристорное управление, показаны на рис..
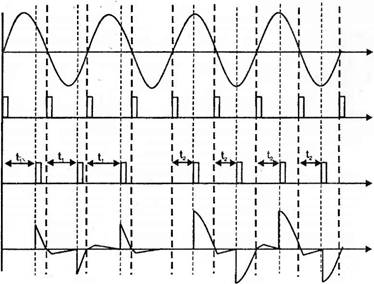
Учитывая принцип работы тиристора, выдача на него открывающего нмпуль са производится дважды за период (т.е. расчет временных сдвигов ведется относительно начата каждого полупериода напряжения обмотки возбуждения).
Схема устройства сопряжения микроконтроллерной системы с АДД показана на рис.
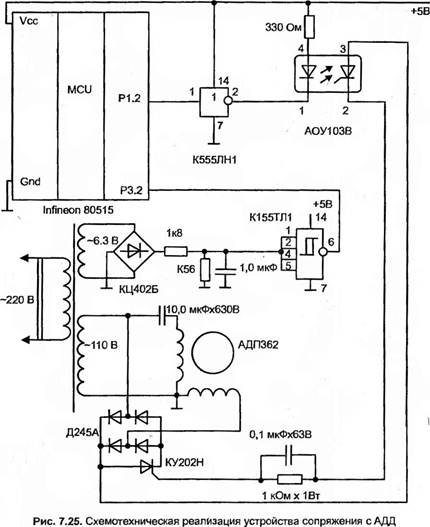
В схеме можно выделить две подсистемы.
Цепь формирования синхросигналов начала очередного периода питающего напряжения, которая образована выпрямителем на диодном мосте, сглаживающим фильтром и триггером Шмитта - микросхемы KI55TJI1. Синхросигналы поступают на вход Р3.2 микроконтроллера MCU (выпрямитель формирует однополярное напряжение, резистивный делитель снижает его амплитуду, конденсатор формирует "плато" импульса, а триггер Шмитта обеспечивает необходимую крутизну фронтов, пригодную для дальнейшего восприятия цифровыми цепями микроконтроллера).
Цепь управления образована тиристором, оптопарой и буферным инвертором. Напряжение на обмотку управления АДД коммутируется посредством тиристора, управляемого от контакта Р1.2 микроконтроллера через оптоэлектронную развязку (для дополнительной безопасности цепей микроконтроллера открываемую через буферный инвертор). Короткие импульсы управления тиристором формируются дифференцирующей цепочкой на основе мощных конденсатора и резистора.
Сдвиг фаз напряжений обмотки возбуждения и обмотки управления достигается применением конденсатора емкостью 10 мкФ, включенного в цепь обмотки возбуждения.
Рассмотрим реальную временную диаграмму, иллюстрирующую работу формирователя синхроимпульсов (рис.), наблюдаемую в схеме с учетом приведенных значений параметров элементов.
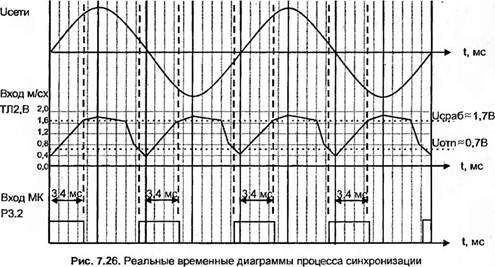
Как следует из приведенных графиков, сигнал начала очередною полупериода питающего напряжения (срез импульса) в силу запаздывания сигнала на RC-звене, а также гистерезиса микросхемы KI55TJI1 оказывается смещенным на 3,4 мс относительно истинного момента начала полунернода, чю необходимо учесть в программной реализации системы, введя соответствующие поправочные коэффициенты. Интервал времени задержки включения тиристора должен составлять от 5 мс (при выдаче максимальной мощности) до 10 мс (при выдаче минимальной мощности) относительно начала полупериода или от 1,6 мс (5 мс - 3,4 мс) до 6,6 мс относительно момента обнаружения среза на входе Р3.2 микроконтроллера.
Для программной реализации системы управления следует разработать программные обработчики прерываний двух типов. В первом, активизирующемся сигналом INTO (срез импульса на входе Р3.2), проводится расчет длительности паузы, выдерживаемой перед включением тиристора, и запускается отсчет этого интервала с помощью таймера ТО. Во втором, активизирующемся сигналом переполнения таймера ТО, генерируется импульс управления (отметим, что для этою должна быть соблюдена следующая процедура действий: сформирован фронт импульса, произведен перезапуск таймера для отсчета времени длительности импульса, и при следующем выполнении обработчика сформирован срез импульса). Схемы программ-обработчиков показаны на рис., а их текст приведен в листинге 7.8
|
|
Дата добавления: 2014-12-10; Просмотров: 867; Нарушение авторских прав?; Мы поможем в написании вашей работы!