КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Взаимное пересечение прямой и плоскости или поверхности (2 группа позиционных задач)
|
|
|
|
а Ç S = М
Вариант А. Прямая и плоскость являются проецирующими
а ^ P1
 S ^ P2
М Î а; а ^ P1; М1 = а1;
М Î S; S^ P2; М2 = а2 ÇS 2 S ^ P2
М Î а; а ^ P1; М1 = а1;
М Î S; S^ P2; М2 = а2 ÇS 2
| 
|
Рисунок 6.5
Вариант В-1. Прямая общего положения пересекается с проецирующей плоскостью
 а – общего положения;
S ^ P1 а – общего положения;
S ^ P1
 а ÇS = М
М Î а, М ÎS, S^ P1 Þ М1 = а1 ÇS 1;
М Î а Þ М2 Î а2 а ÇS = М
М Î а, М ÎS, S^ P1 Þ М1 = а1 ÇS 1;
М Î а Þ М2 Î а2
| 
|
Рисунок 6.6
Вариант В-2. Проецирующая прямая пересекается с плоскостью общего положения
| а ^ P1; S (с || d) – общего положения. М Î а; М1 = а1 М Î S, поэтому через т. М проводим произвольную прямую l в плоскости S 11 = l 1 Ç с1; 21 = l1 Ç d1 M1 Î l1 (11, 21); l Î S l (1; 2) Þ M1 Î l1 (11; 21); М2 Î l2 (12, 22) или l2 Ç a2 = М2 Для определения видимости на P2 рассмотрим конкурирующие точки 3 Î с и 4 Î а. Т.к. точка 3 к нам ближе на плоскости P2 мы видим ее. | 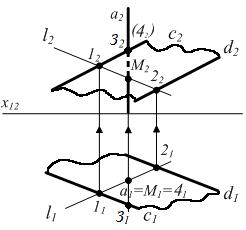
|
Рисунок 6.7
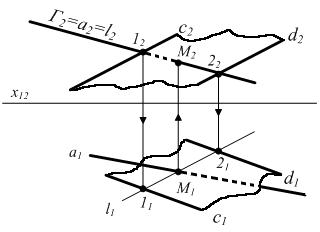
Вариант С. П рямая и плоскость общего положения
Не рационально использовать замену плоскостей проекций. Задача решается по общему алгоритму:
1) Вводим вспомогательную секущую плоскость Г через прямую а. Вспомогательная плоскость всегда вводится проецирующей: Г ^ P1 (или P2) и обязательно Г Ì а.
2) Находим линию пересечения Г с S: Г Ç S = l (1; 2).
Это 1 группа задач варианта В рассмотрена выше.
3) l (1; 2) и прямая а лежат в одной плоскости Г; l Ç а = M - искомая точка пересечения прямой а и плоскости S.
Рассмотрим задачу.
а – общего положения;
S (c || d) – общего положения.
а Ç S = М
 1) Г ^ P2 и G Ì а
2) Г ÇS = l (1, 2)
1 = Г Ç c
2 = Г Ç d
3) l Ç а = M (l1 Ç а1 = M1; М2 Ì а2)
4) Для определения видимости необходимо рассмотреть конкурирующте точки прямой а и c или d. 1) Г ^ P2 и G Ì а
2) Г ÇS = l (1, 2)
1 = Г Ç c
2 = Г Ç d
3) l Ç а = M (l1 Ç а1 = M1; М2 Ì а2)
4) Для определения видимости необходимо рассмотреть конкурирующте точки прямой а и c или d.
| 
|
Рисунок 6.8
|
|
|
|
|
Дата добавления: 2014-12-07; Просмотров: 549; Нарушение авторских прав?; Мы поможем в написании вашей работы!