КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Дифференциальные (реверсивные) индуктивные датчики —ДИД
|
|
|
|
Дифференциальные индуктивные датчики получили наибольшее распространение, они представляют собой совокупность двух нереверсивных датчиков и выполняются в виде системы, состоящей из
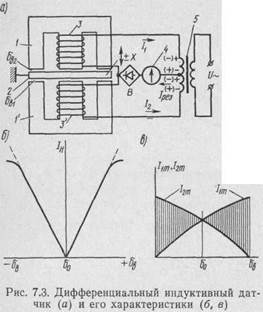 двух магнитопроводов с общим якорем и двумя катушками. Для ДИД необходимы два раздельных источника питания, для чего обычно используется разделительный трансформатор 5 (рис. 7. 3, a).
двух магнитопроводов с общим якорем и двумя катушками. Для ДИД необходимы два раздельных источника питания, для чего обычно используется разделительный трансформатор 5 (рис. 7. 3, a).
По форме магнитной системы различают следующие ДИД: плоские с магнитопроводом Ш-образной формы, набранные из листов электротехнической стали (при частотах свыше 1000 Гц применяются железоникелевые сплавы — пермаллой), и цилиндрические — со сплошным магнитопроводом круглого сечения. Выбор формы датчика зависит от конструктивного сочетания датчика с контролируемым устройством.
Применение Ш-образного магнитопровода обусловлено удобством сборки катушки и уменьшением габаритов датчика. На рис. 7. 3, a изображен ДИД, который состоит из двух Ш-образных магнитопроводов I и 1' с намотанными на них в противоположных направлениях катушками 3 и 3 ', жестко закрепленными относительно друг друга и расположенного между ними подвижного якоря 2. Для питания ДИД используют трансформатор 5 с выводом средней точки на вторичной обмотке. Между этим выводом и общим концом обеих катушек включается прибор 4. При среднем положении якоря, когда воздушные зазоры с обеих сторон одинаковы, индуктивные сопротивления обеих катушек 3 и 3' одинаковы, следовательно, величины токов в катушках равны (I 1 = I 2) и результирующий ток в приборе равен нулю. При небольшом отклонении якоря в ту или иную сторону под действием контролируемой величины X (например, вверх) зазор между якорем и одним из сердечников (катушка 3) уменьшается, а между другим сердечником (катушка 3') и якорем увеличивается, при этом индуктивное сопротивление катушки 3 возрастает, а катушка 3' уменьшается. Прибор 4 в этом случае регистрирует ток, равный разности токов в обмотках и являющийся функцией смещения якоря от среднего положения. Разность токов обычно регистрируется с помощью магнитоэлектрического прибора 4 (микроамперметра) с выпрямительной схемой В на входе (рис. 7. З, а).
|
|
|
Выходная характеристика датчика для измерительных приборов с нулем в начале шкалы показана на рис. 7. 3, б. Из характеристики видно, что полярность выходного тока остается неизменной независимо от знака изменения полного сопротивления катушек 3 и 3'.
Разностный ток в катушках может быть определен по формуле
I р = (I 0 + Δ I)-(I 0-Δ I) = 2Δ I.
При среднем положении якоря (ΔδΒ = 0) входная и выходная величины равны нулю (режим баланса) и, следовательно, 2 ∆I = 0, т. е. ток в приборе равен нулю. Входной величиной индуктивного датчика является отклонение якоря от среднего положения, а выходной величиной — разность токов в катушках 3 и 3'.
В дифференциальной схеме индуктивного датчика токи для каждой из ветвей будут определяться в соответствии с формулой (7. 10):
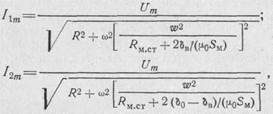 где I 1m, I 2m — амплитуды токов в цепи нагрузки, включенной последовательно с катушкой датчика; Um — амплитуда напряжения источника питания.
где I 1m, I 2m — амплитуды токов в цепи нагрузки, включенной последовательно с катушкой датчика; Um — амплитуда напряжения источника питания.
В зависимости от типа исполнительного устройства, подключаемого к датчику, используется разность токов ∆I = I 1 т — I 2 т или их отношение I 1 m / I2m.
На рис. 7. З, в показано изменение токов I 1 т и I2т от длины воздушного зазора δΒ (в качестве указателя применен прибор магнитоэлектрической системы с нулем в начале шкалы; на выходе схемы установлен мостовой выпрямитель — см. рис. 7. 3, a).
При изменении направления отклонения якоря от нейтрального (среднего) положения меняется на противоположную (на 180°) фаза тока на выходе датчика. При использовании фазочувствительных выпрямительных схем можно получить индикацию направления перемещения якоря от среднего положения на микроамперметре с нулевой отметкой посредине шкалы.
|
|
|
На рис. 7. 4, а, б изображены схема и характеристика дифференциального индуктивного датчика с фазочувствительной выпрямительной схемой. ДИД состоит из якоря, сердечников 2 и 2' с намотанными в противоположных направлениях катушками 3 и 3'', фазочувствительной выпрямительной схемой 4, измерительной обмотки 5, трансформатора питания 6 и измерительного прибора 7 (микроамперметр магнитоэлектрической системы с нулевой отметкой посредине шкалы). При симметричном расположении якоря в обмотках 3 и 3', намотанных в противоположных направлениях, разностный магнитный поток не создается, а в измерительной обмотке 5 в это время э. д. с. не индуктируется.
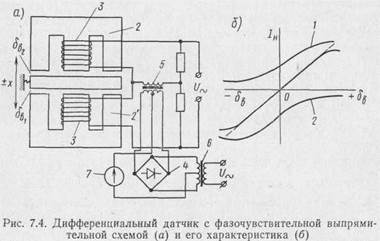 При смещении якоря от нейтрального положения магнитное сопротивление в одной из обмоток, например 3, увеличивается, а для потока, создаваемого другой обмоткой (3'), уменьшается, в результате чего в сердечнике создается разностный магнитный поток, в измерительной обмотке 5 наводится переменная э. д. с, а фаза зависит от направления смещения. Если эту э. д. с. подать на вход фазочувствительной выпрямительной схемы * 4, то магнитоэлектрический прибор 7 на ее выходе будет показывать величину и направление смещения якоря (рис. 7. 4, б), т. е. датчик приобретает реверсивные свойства и его характеристика будет проходить через; два квадранта координатной сетки (через нуль). Очевидно, эта характеристика является результатом алгебраического суммирования ординат характеристик нереверсивных датчиков (1 и 2), составляющих реверсивную схему.
При смещении якоря от нейтрального положения магнитное сопротивление в одной из обмоток, например 3, увеличивается, а для потока, создаваемого другой обмоткой (3'), уменьшается, в результате чего в сердечнике создается разностный магнитный поток, в измерительной обмотке 5 наводится переменная э. д. с, а фаза зависит от направления смещения. Если эту э. д. с. подать на вход фазочувствительной выпрямительной схемы * 4, то магнитоэлектрический прибор 7 на ее выходе будет показывать величину и направление смещения якоря (рис. 7. 4, б), т. е. датчик приобретает реверсивные свойства и его характеристика будет проходить через; два квадранта координатной сетки (через нуль). Очевидно, эта характеристика является результатом алгебраического суммирования ординат характеристик нереверсивных датчиков (1 и 2), составляющих реверсивную схему.
Идеальная характеристика датчика изображена на рисунке штриховой линией, а реальная — сплошной. По реальной характеристке может быть определена чувствительность датчика. Так, чувствительность датчика по току может быть определена как S I = dl/dδ B = ∆I/∆δ B, т. е. чувствительность представляет собой отношение изменения величины тока на выходе датчика к соответствующей величине линейного перемещения подвижной части датчика на его входе.
|
|
|
 Как уже отмечалось, при нейтральном положении, когда δ0 = 0, ток на выходе датчика равен нулю. Это будет справедливо при идентичности обеих половин схемы. Однако практически это условие выполнить сложно, так как изготовить два одинаковых датчика с совершенно одинаковыми характеристиками очень трудно, поэтому при δ0 = 0 всегда имеется небольшой выходной ток — так называемый ток небаланса. Наличие тока небаланса устанавливается проверкой общего выходного тока датчика без якоря. Для уменьшения имеющегося тока небаланса снимают часть витков с одной из катушек (при встречно включенных катушках).
Как уже отмечалось, при нейтральном положении, когда δ0 = 0, ток на выходе датчика равен нулю. Это будет справедливо при идентичности обеих половин схемы. Однако практически это условие выполнить сложно, так как изготовить два одинаковых датчика с совершенно одинаковыми характеристиками очень трудно, поэтому при δ0 = 0 всегда имеется небольшой выходной ток — так называемый ток небаланса. Наличие тока небаланса устанавливается проверкой общего выходного тока датчика без якоря. Для уменьшения имеющегося тока небаланса снимают часть витков с одной из катушек (при встречно включенных катушках).
ДИД, изображенный на рис. 7. 3, а, применяется для измерения перемещений порядка долей и десятых долей миллиметра. При использовании ДИД величина начального воздушного зазора δ0 = δΒ1 = δΒ2 на одну сторону должна быть в два раза больше максимального хода якоря, чтобы не допустить замыкания стальных частей якоря и магнитопровода. Обычно минимальный возможный воздушный зазор δ0 по конструктивным условиям выбирается порядка 0, 2—0, 5 мм.
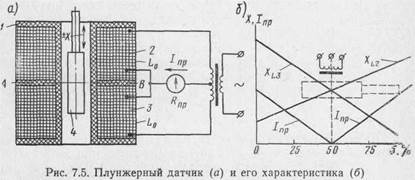
На рис. 7. 5, а представлен цилиндрический датчик, предназначенный для измерения значительных перемещений (плунжерный датчик). Подобный датчик применяется в цепи обратной связи автопилотов. В этом случае якорь соединяется с рулевой тягой самолета. Магнитопровод датчика выполняется в виде цилиндрической трубки 1, выполняющей роль ярма с двумя крышками. Якорь (плунжер) 4 также имеет цилиндрическую форму. Для увеличения магнитной проводимости между наружным ярмом и якорем посредине цилиндра (на линии AB) помещается ферромагнитный диск. Якорь перемещается внутри катушек 2 и 3, что позволяет получать значительно больший рабочий диапазон величин измеряемых перемещений, который может достигать нескольких сантиметров. Катушки датчика 2 и 3 расположены по обе стороны диска и включаются в измерительную схему аналогично включению, показанному на рис. 7. 3, а. Если обозначить индуктивности обмоток при нейтральном положении плунжера через L 0, а коэффициент взаимоиндукции через M, то реактивные сопротивления катушек 2 и 3 определяются так:
|
|
|
X L2 = j ω (L0+∆L+M);
X L3 = jω(L 0 - ∆L +M),
где D L — приращение индуктивности при перемещении якоря (плунжера). При среднем нулевом положении якоря ток через измерительный прибор равен нулю (I ПР = 0), так как X l2 = X l3.При смещении якоря от среднего положения изменяются в противоположных направлениях реактивные сопротивления X L2, Х L3и через измерительный прибор протекает ток, пропорциональный величине смещения якоря, а фаза тока зависит от направления перемещения якоря.
На рис. 7. 5, б показаны характеристики плунжерного датчика, которые практически прямолинейны. При использовании прибора магнитоэлектрической системы с нулевой отметкой в начале шкалы необходимо на выходе схемы установить мостовой выпрямитель.
X L2 = f 2(δ%), I ПP= f 1(δ%), X L3 =f 3(δ%),
где X L2и X L3— реактивные сопротивления катушек с учетом их взаимной индуктивности M.
Чувствительность цилиндрического датчика составляет десятые доли вольта на 1 мм перемещения якоря.
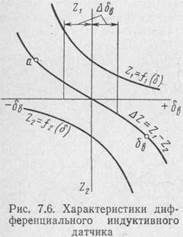
На рис. 7. 6 приведены характеристики ДИД:
Ζ1 = f 1(δ), Z 2= = f 2(δ2), ∆ Z = Z1-Z2 = f 3(∆δ), где Δδ —смещение якоря от среднего положения.
Дифференциальные индуктивные датчики по сравнению с одинарными датчиками имеют следующие преимущества:
1. Линейная часть aб характеристики ΔΖ (рис. 7. 6) имеет больший участок, что позволяет увеличить рабочее перемещение Δδякоря до Δδ= (0, 3÷0, 4)δ0·
2. Погрешности от наличия усилий притяжения, колебаний питающего напряжения и температуры окружающей среды в значительной степени взаимно компенсируются во всем рабочем диапазоне измеряемых перемещений (в частности, нулевая точка характеристики при нейтральном положении якоря не смещается приколебаниях напряжения).
3. Чувствительность схемы в два раза больше (если катушки датчика включены в соседние плечи мостовой схемы, т. е. S I = 2 S I; см. §2. 5).
ГЛАВА VIII
ПЬЕЗОЭЛЕКТРИЧЕСКИЕ ДАТЧИКИ (ДАТЧИКИ С ИЗМЕРЯЮЩЕЙСЯ Э. Д. С.)
|
|
|
|
|
Дата добавления: 2015-05-09; Просмотров: 3303; Нарушение авторских прав?; Мы поможем в написании вашей работы!