КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Нечеткая логика в PID -регуляторах
|
|
|
|
Нечеткая логика, нейронные сети и генетические алгоритмы
Нечеткая логика в PID -регуляторах
PID-регуляторы, описанные выше, имеют плохие показатели качества при управлении нелинейными и сложными системами, а также при недостаточной информации об объекте управления. Характеристики регуляторов в некоторых случаях можно улучшить с помощью методов нечеткой логики, нейронных сетей и генетических алгоритмов. Перечисленные методы называют "soft-computing", подчеркивая их отличие от "hard-computing", состоящее в возможности оперировать с неполными и неточными данными. В одном контроллере могут применяться комбинации перечисленных методов (фаззи- PID, нейро- PID, нейро-фаззи- PID регуляторы с генетическими алгоритмами).
Основным недостатком нечетких и нейросетевых контроллеров является сложность их настройки (составления базы нечетких правил и обучения нейронной сети).
Нечеткое управление (управление на основе методов теории нечетких множеств) используется при недостаточном знании объекта управления, но наличии опыта управления им, в нелинейных системах, идентификация которых слишком трудоемка, а также в случаях, когда по условию задачи необходимо использовать знания эксперта. Примером может быть доменная печь или ректификационная колонна, математическая модель которых содержит много эмпирических коэффициентов, изменяющихся в широком диапазоне и вызывающих большие затруднения при идентификации. В то же время квалифицированный оператор достаточно хорошо управляет такими объектами, пользуясь показаниями приборов и накопленным опытом.
PID -регуляторы с нечеткой логикой в настоящее время используются в коммерческих системах для наведения телекамер при трансляции спортивных событий, в системах кондиционирования воздуха, при управлении автомобильными двигателями; для автоматического управления двигателем пылесоса и в других областях.
|
|
|
Поскольку информация, полученная от оператора, выражена словесно, для ее использования в PID -регуляторах применяют лингвистические переменные и аппарат теории нечетких множеств, который был разработан Л. Заде [Zadeh] в 1965 году. Основная идея этой теории состоит в следующем. Если в теории четких множеств некоторый элемент (например, температура 500 C) может принадлежать множеству (например, множеству "температура горячей воды Tгоряч.") или не принадлежать ему, то в теории нечетких множеств вводится понятие функции принадлежности, которая характеризует степень принадлежности элемента множеству. При этом говорят, например, "температура 500 C принадлежит множеству Tгоряч. со степенью принадлежности 0,264". Функцию принадлежности можно приближенно трактовать как вероятность того, что данный элемент принадлежит множеству.
В 1974 году Мамдани [Mamdani] показал возможность применения идей нечеткой логики для построения системы управления динамическим объектом, а годом позже вышла публикация, в которой описывался нечеткий PI-регулятор и его применения для управления парогенератором. С тех пор область применения нечетких регуляторов постоянно расширяется, увеличивается разнообразие их структур и выполняемых функций.
Нечеткая логика в PID-регуляторах используется преимущественно двумя путями: для построения самого регулятора и для организации подстройки коэффициентов PID -регулятора. Оба пути могут использоваться в PID -контроллере одновременно.
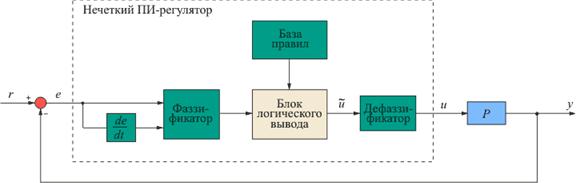
Рис. 2. Структура нечеткого PI –регулятора
Одна из наиболее распространенных структур нечеткого PI-регулятора) показана на рис. 2. На вход регулятора поступает ошибка е и вычисляется ее производная по времени de/dt. Далее обе величины сначала подвергаются операции фаззификации (преобразования в нечеткие переменные), затем полученные нечеткие переменные используются в блоке нечеткого логического вывода для получения управляющего воздействия на объект, которое после выполнения операции дефаззификации (обратного преобразования нечетких переменных в четкие) поступает на выход регулятора в виде управляющего воздействия u.
|
|
|
|
|
|
|
Дата добавления: 2014-01-03; Просмотров: 1385; Нарушение авторских прав?; Мы поможем в написании вашей работы!