КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Трактора і автомобіля 4 страница
Можливі випадки руху коліс в таких умовах:
а) кочення жорсткого колеса по жорсткій поверхні;
б) кочення жорсткого колеса по поверхні, яка деформується;
в) кочення еластичного колеса (з пневматичною шиною) по жорсткій поверхні;
г) кочення еластичного колеса по поверхні, яка деформується;
На ведене колесо (рис. 2.6) діють: F п – штовхаюча сила; G п – вертикальне навантаження, що містить вагу колеса; R п – нормальна реакція грунту, направлена за радіусом.
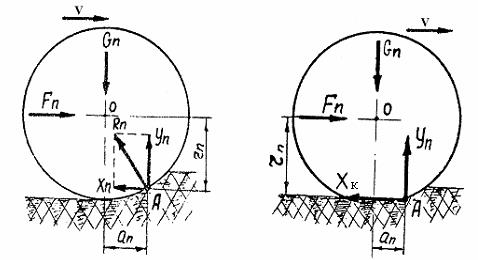
| Рис. 2.6. Схема сил, діючих на жорстке ведене колесо при рівномірному коченні по горизонтальній деформіруємій поверхні | Рис. 2.7.Схема сил, діючих на еластичне ведене колесо при рівномірному коченні по горизонтальній деформіруємій поверхні |
Результуюча реакція  розкладається на вертикальну У п і горизонтальну Х п складові, які дорівнюють У п = G п, Х п = F п = Рfn.
розкладається на вертикальну У п і горизонтальну Х п складові, які дорівнюють У п = G п, Х п = F п = Рfn.
Рівняння моментів відносно центра колеса записуємо так
Мfn = Рfn · rn= Уn · αn. (2.31)
Звідки
 (2.32)
(2.32)
де  - коефіцієнт кочення.
- коефіцієнт кочення.
Значення коефіцієнта кочення для жорсткого колеса визначається за формулою Грандвуане
 (2.33)
(2.33)
де Д і в – зовнішній діаметр і ширина ободу.
Глибина колії в см становить
 (2.34)
(2.34)
Умова обертання веденого колеса визначається так Р f n ≤ φ · Gn або f n ≤ φ.
2.7.2. Динаміка ведучого колеса з пневматичною шиною
Значення коефіцієнта кочення для пневматичної шини визначається за формулою А.Є. Омел'янова
 (2.35)
(2.35)
де  – тиск повітря в шині, Н/см2;
– тиск повітря в шині, Н/см2;
к1 і к2 – коефіцієнти, які залежні від конструкції шини. На стерні при значенні С п = 20 Н/см2, к1 = 0,35…0,50; к2 ≈ 0,065.
На ведуче колесо (рис. 2.8) діють: Мк – ведучий момент, прикладений до осі; Рк – дотична сила тяги; Рfк – сила опору коченню; Fк – реакція остову; Gк – вертикальне навантаження, включаючи вагу колеса.
Момент опору кочення дорівнює
Мfк = Рfк · rк = Ук. αк. (2.36)
Рівняння моментів відносно вісі колеса записуємо так
Мк = Рк · rк = (Рк - Рfк) · rк + Рfк · rк. (2.37)
Баланс потужності становить
Мк·ωк = Рк ·Vт,
де ωк і Vт – кутова і теоретична поступальна швидкості колеса.
При сталому русі дотична сила тяги дорівнює
Рк = Fк + Рfк. (2.38)
Потужність, підведена до колеса,
Nк = Мк·ωк = Рк (Vт – Vд) + Рк Vд = Рк (Vт – Vд) + Рfк · Vд + FкVд, (2.39)
витрачається на подолання наступних опорів: Рк(Vт – Vд) – втрати потужності на буксування ведучого колеса; Рfк Vд – втрати потужності на кочення
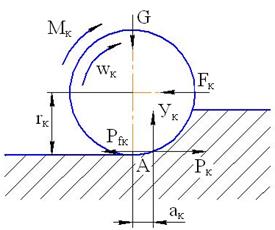
Рис. 2.8. Схема сил і моментів, які діють на ведуче колесо з пневматичною шиною при рівномірному русі по горизонтальній деформіруємій поверхні
ведучого колеса; FкVд – корисна потужність, яка передається остову машини.
ККД ведучого колеса становить
 (2.40)
(2.40)
де Vт = w к · rк – теоретична швидкість;
ηδ – ККД, що враховує втрати на буксування. 
η f к – ККД, що враховує втрати на кочення. 
2.7.3. Зчеплення з ґрунтом і буксування рушіїв
Дотична сила тяги складається із сил тертя і зчеплення
Рк = Ртр + Рзчеп = μ ·Gзч + σ · Fв, (2.41)
де μ = 0,25…0,30 – коефіцієнт тертя елементів рушіїв з грунтом;
Gзч – зчіпна вага машини;
σ – горизонтальна напруга зім'яття грунту;
Fв – сума площі вертикальних проекцій ґрунтозачепів, що
знаходяться в контакті з ґрунтом.
Напруга зім'яття грунту становить
 (2.42)
(2.42)
Горизонтальна деформація (пресування) грунту визначається за залежністю
 . (2.43)
. (2.43)
Коефіцієнт буксування дорівнює
 , (2.44)
, (2.44)
або
 (2.45)
(2.45)
де ξ – коефіцієнт, який залежить від закону розподілу тиску по грунтозачепам.
Проф. Ю.К. Кіртбая запропонував таку емпіричну формулу
 (2.46)
(2.46)
де а, в і с – безрозмірні коефіцієнти, які залежать від типу трактора і ґрунтових умов.
Проф. Б.Я. Гінцбург запропонував визначити буксування за рівнянням
 (2.47)
(2.47)
де φ – коефіцієнт зчеплення;
а, в і с – коефіцієнти, що залежать від типу шляху та ґрунтових умов.
Для гусеничних тракторів а= 0,04; в = 4; с = 8. Для колісних тракторів а= 0,13; в = 0,013; с = 8.
Аналітичне визначення буксування машини не завжди відповідає дійсності із-за орієнтовного значення коефіцієнтів а, в, с. Більш достовірніший метод визначення буксування є дослідний. Для цього необхідно при дослідах визначити дійсний і теоретичний радіус кочення ведучого колеса (рушія).
Визначення радіусу кочення колеса, буксування при дослідах виконується практично та аналітично.
Довжина шляху залікової ділянки, пройденого трактором при випробовуваннях на холостому ході, становить
S = 2πrт · nx, (2.48)
а під навантаженням –
S = 2πrк · nк, (2.49)
де rт і rк – теоретичний і робочий радіуси ведучого колеса;
nx і nк – кількість обертів ведучого колеса при холостому русі і під навантаженням.
З рівностей (2.48, 2.49) маємо
S = 2πrт · nx = 2πrк · nк. (2.50)
Рівняння (2.50) можемо записати так
rт · nx = rк · nк,
або

Коефіцієнт буксування можливо визначити за залежністю
 (2.51)
(2.51)
де rт – теоретичний радіус ведучого колеса, що котиться без буксування
і тангенціальної деформації;
rк – робочий (динамічний) радіус колеса, рівний відстані від осі
колеса до лінії дії дотичної сили тяги;
Орієнтовні значення допустимого буксування тракторів приведені в табл. 2.4.
Питома сила тяги
Таблиця 2.4
Орієнтовні значення допустимого буксування тракторів, %
| Тип грунту | Для гусеничних тракторів | Для колісних тракторів |
| Щільний ґрунт (конюшина, лука) | 2 - 4 | 10 - 12 |
| Стерня | 3 - 5 | 15 - 18 |
| Ґрунт, підготовлений під посів | 4 - 5 | 25 – 30 |
Таблиця 2.5
Значення питомої сили тяги φг для гусеничних тракторів
| Буксування, % | <35 | ||||||||
| Переліг | 0,60 | 0,67 | 0,72 | 0,78 | 0,81 | 0,82 | 0,83 | 0,84 | 0,84 |
| Стерня | 0,49 | 0,55 | 0,62 | 0,70 | 0,74 | 0,77 | 0,78 | 0,80 | 0,81 |
| Ґрунт під посів | 0,24 | 0,35 | 0,49 | 0,56 | 0,60 | 0,63 | 0,64 | 0,65 | 0,66 |
Таблиця 2.6
Значення питомої сили тяги φг для колісних тракторів
| Буксування, % | ||||||||||
| Щільний ґрунт (конюшина, лука) | 0,27 | 0,40 | 0,49 | 0,55 | 0,60 | 0,63 | 0,66 | 0,67 | 0,68 | 0,69 |
| Стерня | 0,22 | 0,34 | 0,44 | 0,50 | 0,55 | 0,58 | 0,60 | 0,61 | 0,61 | 0,62 |
| Ґрунт під посів | 0,20 | 0,32 | 0,41 | 0,46 | 0,51 | 0,53 | 0,55 | 0,56 | 0,57 | 0,57 |
Таблиця 2.7
Параметри гусеничних рушіїв серійних тракторів
| Марка | Т-70С | ДТ-75М | ДТ-175 | Т-150 | Т-4А | Т-100, Т-130 |
| Клас, кН | ||||||
| tзв | ||||||
| zзв | 11,5 |
 (2.52)
(2.52)
відома також під назвою безрозмірного тягового зусилля або коефіцієнта використання зчеплення.
Числові значення питомої сили тяги тракторів при різних значеннях буксування рушіїв на різних ґрунтових фонах приведені в табл. 2.5, 2.6. Залежність буксування рушіїв тракторів від значення φг на різних ґрунтових фонах приведені на рис. 2.9, 2.10.
Величина буксування характеризує втрату швидкості поступального руху трактора (автомобіля) від можливого його теоретичного значення.
Фізична сутність процесу буксування міститься в наступному: зчеплення ходового апарату машини можливо уявити як виявлення сил тертя, діючих між опорною поверхнею рушія з ґрунтом, та сил зчеплення, виникаючих при упиранні рушіїв у ґрунт. На твердих ґрунтах основне значення мають сили тертя. На рихлих ґрунтах роль сил зчеплення значно збільшується і в багатьох випадках є вирішальною. Зачепи, заглиблюючись у ґрунт, пресують його у горизонтальному напрямку, внаслідок чого вісь рушія умовно переноситься на відповідну відстань назад. У цьому міститься основна причина зниження поступальної швидкості машини (формула 2.51).
У залежності від різниці Vт – Vд буксування рушіїв δ коливається від 0 до 100%. При відсутності буксування (δ = 0) теоретичне значення швидкості руху машини дорівнює дійсному значенню швидкості: Vт = Vд і навпаки, при 100% буксуванні рушіїв, дійсна швидкість руху машини Vд = 0.
При збільшенні δ зростає і сила опору кочення машини, рушії більше занурюються у ґрунт. У цьому випадку δ = f(Gзг). Зчеплення можливо розглядати як сили тертя та сили зчеплення. Буксування δ залежить від форми відбитку рушія на ґрунт та розміру дотичної сили тяги Рк. Передача ведучого крутного моменту Мк супроводжується буксуванням δ ведучих коліс. Буксування (δ=0) буває при відсутності горизонтальних та тангенціальних деформацій шин. При цьому Рк = 0, але це неможливо. Дос- лідами встановлено, що буксування рушіїв δ присутнє і при холостому русі (nхол).
На буксування рушіїв значно впливає нормальна реакція грунту Ук, що рівнозначно зчіпній вазі Gзч. Отже відношення Рк/Gзч = φк – коефіцієнт використання зчіпної ваги.
Коефіцієнт використання зчіпної ваги φк не постійний і залежить від дотичної сили тяги. При Рк = 0 і φк = 0. Максимальне значення φк max визна- чається при повному використанні зчіпної ваги Рк = Рφ.
ККД, який враховує втрати на буксування, дорівнює
 (2.53)
(2.53)
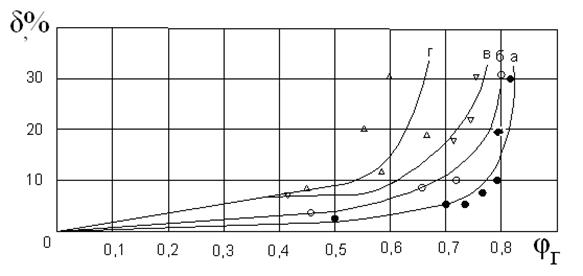
Рис. 2.9. Усереднені залежності буксування від граничної сили тяги для гусеничних тракторів, а – переліг; б – стерня; в – пар; г – ґрунт,
підготовлений до посіву

Рис. 2.10. Усереднені залежності буксування від граничної сили тяги для колісних тракторів, а – асфальт, бетон; б – щільний ґрунт (конюшина, лука); в – стерня; г – ґрунт, підготовлений до посіву
Швидкість руху машини є відстань, яку машина проходить за одиницю часу. Вона залежить від частоти обертання колінчастого валу двигуна, передаточного числа трансмісії, буксування ведучого апарату та інших умов.
Трактори мають три групи передач, які забезпечують необхідні діапазони швидкостей руху:
допоміжні передачі призначені для робіт, при яких допустимі швидкості руху обмежуються умовами виконуємого технологічного процесу;
головні передачі, так званий діапазон робочих швидкостей руху, при яких виконується більшість сільськогосподарських операцій;
транспортні передачі, що застосовуються для перевезення вантажів та виконання холостих переїздів.
Розрізняють теоретичну, робочу (технічну) та холостого ходу швидкості рух трактора, а також середньо-технічну і експлуатаційні швидкості при роботі трактора у складі агрегату.
Теоретична швидкість – швидкість прямолінійного руху трактора по рівній горизонтальній площині без буксування при заданому режимі роботи двигуна.
Робоча (технічна) швидкість – фактична швидкість руху при роботі у даних умовах.
Швидкість холостого руху трактора – швидкість руху трактора без гакового навантаження.
Теоретична швидкість руху в км/г визначається за залежністю
 (2.54)
(2.54)
а дійсна швидкість –
 . (2.55)
. (2.55)
Основним параметром рушія, через який здійснюється розрахунок передаточного числа трансмісії, є значення робочого радіусу кочення ведучих коліс колісного трактора чи радіусу ведучої зірочки гусеничного трактора.
При проведенні дослідів (практично) робочий радіус ведучих коліс в м визначається заміром кількості обертів п х ведучих коліс при русі трактора на холостому ході на відрізку S шляху
 . (2.56)
. (2.56)
Згідно проекту міжнародного стандарту передбачається визначення робочого радіусу за залежністю
 (2.57)
(2.57)
де 
 – кількість обертів ведучих коліс при буксуванні трактора (з ковзанням ведучих коліс).
– кількість обертів ведучих коліс при буксуванні трактора (з ковзанням ведучих коліс).
Кінематичні параметри рушія колісного трактора в Н визначають в залежності від навантаження на ведуче колесо Gк через вагу трактора G з урахуванням розподілу реакцій між колесами так
 (2.58)
(2.58)
де  – число ведучих коліс;
– число ведучих коліс;
λкст – статичний коефіцієнт навантаження ведучих коліс;
Кд – коефіцієнт динамічності;
G – експлуатаційна вага трактора, Н.
Для вибору шин рекомендується задаватися коефіцієнтом динамічності у межах Кд = 1,25…1,35.
Користуючись довідковими матеріалами по навантаженню на ведуче колесо Gк вибирається типорозмір шин для ведучих коліс.
Динамічний (робочий) радіус ведучих коліс rк під час руху трактора не лишається постійним, його значення залежить від багатьох експлуатаційних факторів і може значно відрізнятися від статичного, наведеного у довідковій літературі. На стадії проектування (розрахунку) динамічний радіус ведучих коліс у метрах (рис. 2.11) обчислюють за емпіричною залежністю через відомі розміри шин ведучих коліс
 (2.59)
(2.59)
де d – посадковий діаметр шини, мм;
В – ширина профілю шини, мм,
або
 (2.60)
(2.60)
де d і В у дюймах.
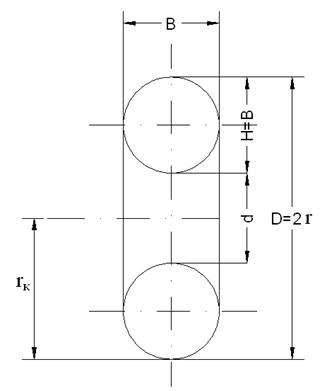
Рис. 2.11. Схема до визначення робочого радіусу ведучого колеса
Кінематичні параметри рушія гусеничного трактора визначаються розрахунком радіуса ведучої зірочки rк трактора в м за формулою
 (2.61)
(2.61)
де tзв – крок гусеничної ланки, м;
zзв – кількість ланок гусениці, яка укладається за один оберт ведучої зірочки.
З метою уніфікації при проектуванні значення tзв та zзв приймають, орієнтуючись на розміри гусеничних рушіїв серійних тракторів, які можна знайти у технічних характеристиках (табл. 2.7).
Шини для автомобіля вибирають по вантажопід'ємності та допустимій для даної шини швидкості руху. Навантаження на одну шину обчислюють через повну вагу автомобіля Gа з урахуванням розподілу реакцій між переднім Gп і заднім Gз мостами, які визначають через коефіцієнти навантаження передніх λп = Gп/Gа і задніх λз = Gз/ Gа коліс. Очевидно при цьому λп + λз = 1.
Значення коефіцієнтів навантаження на стадії проектування вибирають з урахуванням збереження керованості як порожнього так і повністю завантаженого автомобіля:
λ'п = 0,5…0,6 та λ'з = 0,5…0,6 – для порожнього автомобіля,
λп = 0,33…0,20 та λз = 0,67…0,80 – для завантаженого автомобіля.
Статичне навантаження на одну шину передніх і задніх коліс визначається за залежностями
Gп = λп · Gа/zп ; (2.62)
Gз = λз · Gа/zз, (2.63)
де Gп та Gз – навантаження на шини передніх і задніх коліс;
zп та zз – кількість шин на передньому та задньому (задніх)мостах.
По максимальному навантаженню на шину з таблиці асортименту шин вибираємо шини для проектованого автомобіля. Слід зважити на умовний поділ шин за призначенням для легкових та вантажних автомобілів. Дані по вибраним шинам виписуємо і використовуємо у подальших розрахунках.
Розрахунковий (динамічний) радіус колеса rд визначаємо через розміри шини з урахуванням можливої деформації по вищеприведеним формулам.
2.8. Основні параметри колісної машини. Сили, які діють на нерухому машину
Основні параметри колісної машини розглянемо на прикладі колісного трактора Т-150К.
Схема колісної машини представлена на рис. 2.12; на ній позначені основні параметри машини і сили, які діють на нерухому машину в загальному випадку.
На рис. 2.12 позначено: I - лінія горизонту; II - лінія поверхні дороги (поля); a - кут нахилу лінії поверхні дороги до лінії горизонту, град. та хвилини; L - продольна (повздовжня) база машини, м; G - вага машини (сила тяжіння), Н. Вектор ваги машини прикладений в центрі ваги (Ц.В.) і спрямований вертикально (перпендикулярно) до лінії горизонту. Складовими ваги машини є: Gcosa - нормальна (перпендикулярна) до лінії поверхні дороги і Gsina - паралельна лінії поверхні дороги; а - продольна (повздовжня) координата Ц.В. машини, м (величина продольного зміщення Ц.В. відносно вісі задніх ведучих коліс); h - вертикальна координата Ц.В. машини, м (величина вертикального зміщення Ц.В. відносно лінії поверхні дороги); аr - величина продольного зміщення точки з¢єднання навісної (прицепної) машини з механізмом навіски трактора або прицепним гаком автомобіля відносно вісі задніх ведучих коліс; О1 і О2 - точки центрів геометричних вісей веденого і ведучого коліс; Ок і Оп - точки перехрестя нормалі, проведеної до лінії поверхі дороги через центри геометричних вісей веденого і ведучого коліс з лінією поверхні дороги; Ак і Ап - центри п¢ятна контакту поверхні шин ведучого і веденого коліс з лінією поверхності дороги; ак і ап - величини продольного (повздовжнього) зміщення центрів п¢ятен контактів ведучого і веденого коліс відносно центрів геометричних
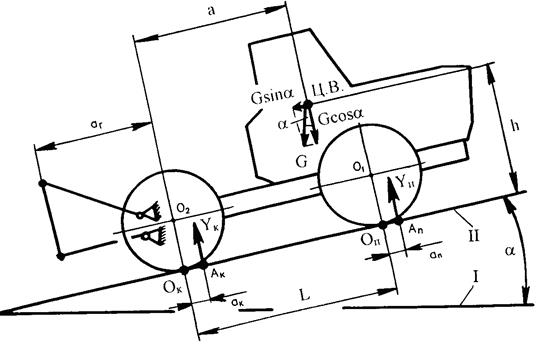
Рис. 2.12. Сили, які діють на нерухому колісну машину в
загальному випадку
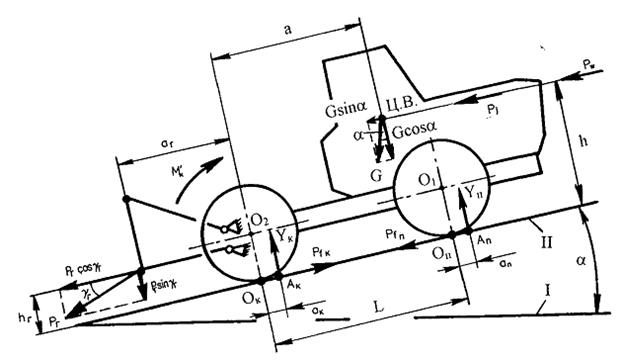
Рис. 2.13. Сили, які діють на колісну машину в загальному
випадку руху
вісей ведучого і веденого коліс; Ук і Уп - нормальні (перпендикулярні від лінії поверхні дороги) реакції грунту на шини ведучого і веденого коліс.
2.9. Сили, які діють на рухому колісну машину
Сили, які діють на рухому колісну машину розглянемо на прикладі колісного трактора Т-150К.
При рухові колісної машини на неї, крім указаних в попередньому розділі сил, діє штовхаюча сила і сила опору руху.
Розглянемо ці сили при загальному випадку руху машини, коли рух змінний, лінія дороги має деякий нахил до лінії горизонту і до прицепного гака машини прикладено тяговий опір, який створює прицеп, сільськогосподарська машина або знаряддя.
В цьому випадку зі сторони двигуна, повітряного середовища, гравітаційного поля Землі та прицепної машини або знаряддя на колісну машину діють наступні сили та моменти (рис. 2.13):
1. Повна вага машини G.
Числове значення повної ваги машини в Н визначається за залежністю
G = m × g, (2.64)
де m - повна маса машини, кг;
g - прискорення вільного падіння, рівне 9,81 м/с2.
Повна маса автомобіля становить
m = m0 + mгр + 75 × n, (2.65)
де m0 - власна маса автомобіля, кг;
mгр - вантажопід¢ємність автомобіля, кг.
n - число посадкових місць в кабіні автомобіля, рахуючи місце
водія;
75 - середньостатистична ГОСТівська вага одного пасажира, кг.
Число посадкових місць в кабіні проєктуємого автомобіля приймається рівним числу місць в автомобіля-прототипа. Автомобіль-прототип приймається по величині вантажопід¢ємності.
Власна маса автомобіля дорівнює
 (2.66)
(2.66)
де hгр - коефіцієнт вантажопід¢ємності. (Величина коефіцієнта зале- жить від призначення автомобіля, його плануємої вантажо-
під¢ємності, кількості ведучих мостів, стану і завантаженості доріг). Для сучасних автомобілів величина коефіцієнта вантажопід¢ємності знаходиться в межах: легкові автомобілі – 0,25…0,40; вантажні автомобілі з колісною формулою 4´2 – 0,9…1,2; вантажні автомобілі з колісною формулою 4 ´ 4, 6 ´ 6 - 0,5…0,8.
Для прикладу в табл. 2.8 приведено значення повної ваги деяких Вітчизняних автомобілів.
Конструктивна маса колісного трактора визначається за залежністю
 (2.67)
(2.67)
де Ргн1 - номінальна сила тяги на гаку на І-й передачі, Н;
кп - коефіцієнт можливого перевантаження трактора. Величина кп дорівнює величині коефіцієнта корекції подачі палива позитивним коректором регулятора паливного насосу високого тиску. Для сучасних Вітчизняних тракторів величина коефіцієнта корекції подачі палива становить: для дизелів модифікації СМД-60 – 1,20…1,25; для інших дизелів – 1,10…1,15. Величина Кп для зарубіжних тракторів вказується для кожної моделі в технічному паспорті дизеля або трактора [10];
jкдоп - коефіцієнт використання зчіпної ваги трактора в даних грунтових умовах при допустимому буксуванні рушіїв. Для колісних тракторів при допустимому буксуванні 14…16 % величина jкдоп становить 0,50…0,65;
lк - динамічний коефіцієнт навантаження ведучих коліс;
f - коефіцієнт опору перекочування рушіїв в даних грунтових умовах.
|
|
Дата добавления: 2017-02-01; Просмотров: 173; Нарушение авторских прав?; Мы поможем в написании вашей работы!