КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Трактора і автомобіля 6 страница
|
|
|
|
Рівняння моментів має такий вигляд
 (2.124)
(2.124)
Виконаємо такі математичні дії
 (2.125)
(2.125)
 (2.126)
(2.126)
 (2.127)
(2.127)
 (2.128)
(2.128)

 (2.129)
(2.129)
Величина горизонтальної складової Rх результуючої сили реакцій грунту в рівняннях (2.123) і (2.129) визначається за залежністю
 (2.130)
(2.130)
де Gн - вага плуга, Н;
Rу - результуюча всих вертикальних реакцій грунту, які діють на
робочі органи плуга, Н. Величина Rу визначається по спеціальним методикам, які детально викладені у відповідному розділі дисципліни “Сільськогосподарські машини”.
Величина нормальних реакцій грунту визначається із рівняння моментів сил, які діють в плузі відносно миттєвого центра обертання навісної машини Ов, і дорівнює
 (2.131)
(2.131)
В чисельнику залежності (2.131) знаходиться величина заглибляючого момента навісної машини. Стійка робота агрегату можлива в тому випадку, коли заглибляючий момент має додатнє значення.
Оптимальне значення нормальних реакцій грунту на опорні колеса навісної машини знаходиться в межах 600…1000 Н, а заглибляючого момента навісної машини – 2000…3000 Н×м.
Із рівняння (2.131) видно, що навантаження на опорні колеса навісної машини залежить від величини заглибляючого момента, який при даній результуючій силі реакцій грунту на робочі органи Rрез визначається положенням миттєвого центра обертання Ов, а також від місця встановлення опорних коліс. Чим більша відстань між опорними колесами і миттєвим центром обертання, тим менший вплив здійснює на навантаження опорних коліс переміщення їх в практично можливих межах вперед або назад.
При паралельності тяг навісного пристрою нормальне навантаження на опорні колеса навісної машини можливо регулювати, змінюючи нахил тяг до горизонту. Якщо тяги направленні вгору, то навантаження на опорні колеса більше, чим результуюча вертикальна сила Rx × tgaн = Gн + Rу, яка діє на навісну машину. Якщо тяги направлені вниз, то на опорні колеса діє лише частина вертикальних навантажень, які діють на машину; більша частина навантажень передається на колеса трактора. При цьому, чим більший кут нахилу тяг, тим менше навантажені опорні колеса навісної машини.
|
|
|
При роботі трактора з навісною машиною сумарна вертикальна реакція грунту на колесах трактора на величину Rх × tgaн - Ун більша ваги трактора. Тому при зменшенні навантаження на опорні колеса збільшується загальне довантаження трактора, збільшується його зчіпна вага та зменшується тяговий опір навісної машини. Одночасно зі збільшенням навантаження на опорні колеса хід навісної машини стає нестійким; порушується рівномірність глибини обробітку; можливе виглиблення робочих органів. В зв¢язку з чим виникає необхідність в коректуванні навантажень на опорні колеса навісного агрегату у відповідності до умов його роботи.
Коректування навантажень опорних коліс навісного агрегату здійснюється двома способами:
1. Зміною положення миттєвого центра обертання навісної машини Ов зміною кута нахилу верхньої тяги навісного механізму.
Недоліком цього способу є ступеневість регулювання, а також необхідність зупинки агрегату для переставляння верхньої тяги. При цьому має місце нерівномірність глибини обробітку при рухові агрегату по нерівним ділянкам поля.
2. Зміною тиску в об¢ємах гідравлічного циліндра навісного механізму. Для цього в гідравлічній системі навісного механізму застосовуються гідравлічні збільшувачі зчіпної ваги ведучих коліс трактора. Детально будова та принцип дії цих пристроїв розглядаються при вивченні курсів “Трансмісія тракторів”, “Гідравлічні системи тракторів” та в підручниках по конструкції тракторів.
|
|
|







 Питання для самопідготовки та самоконтролю
Питання для самопідготовки та самоконтролю
1.Назвіть всі сили та моменти, які діють на трактор чи автомобіль в загальному випадку їх руху.
2.Як впливають обертальні маси двигуна трансмісії і коліс трактора (автомобіля) на їх опір руху?
3.Що таке коефіцієнт врахування обертових мас?
4.Що таке тяговий баланс машини?
5.Який зв'язок між тяговим балансом і диференціальним рівнянням руху машини?
6.Що таке ведучий момент по зчепленню з ґрунтом?
7.Що таке ведучий момент по двигуну і від яких параметрів залежить його значення?
8.Який зв'язок ведучого момента по двигуну з крутним моментом двигуна?
9.Що таке коефіцієнт запасу крутного моменту двигуна і коефіцієнт пристосованості двигуна по частоті обертів колінчастого валу, які їх значення?
10.Від яких факторів залежить значення ведучого моменту при змінному русі трактора чи автомобіля?
11.Які значення має механічний ККД трансмісії трактора?
12.Назвіть усі відомі радіуси пневмошини.
13.Яке колесо називається ведене? Скільки відомо складових опору кочення колеса?
14.Що таке коефіцієнт опору кочення колеса, чому він дорівнює і як знайти його значення експериментально?
15.Які три головні складові сили опору кочення веденого колеса при змінному русі?
16.Які сили і моменти діють на ведуче колесо?
17.Чим відрізняється характер утворення дотичної сили тяги під ведучим колесом на твердій основі і на деформованому ґрунті?
18.Що таке кінематичний радіус кочення колеса і в яких межах може змінюватися його значення?
19.Що таке буксування колеса і як воно вимірюється експериментально?
20.Що таке ККД ведучого колеса?
21.Як зв'язані нормальні навантаження на колеса трактора (автомобіля) з коефіцієнтом опору кочення та зчеплення?
22.Як змінюються нормальні навантаження на колеса машини в залежності від навантаження на гаку?
23.Що таке коефіцієнт навантаження?
24.Які відомі способи довантаження ведучих задніх коліс трактора, що працює з начіпним знаряддям?
3. Загальна динаміка гусеничного трактора
3.1. Особливості кінематики і динаміки гусеничного рушія
При розгляданні гусеничного рушія ведучу зірочку прийнято називати ведучим колесом, а напрямне колесо – веденим.
|
|
|
В гусеничного рушія розрізняють два робочих радіуса коліс: мінімальний (рис. 3.1) і максимальний. У подальшому будемо приймати середнє значення робочого радіуса колеса.
Теоретична швидкість руху гусеничного трактора в км/г визначається за залежностями
VТ = 0,377  ; (3.1)
; (3.1)
 ; (3.2)
; (3.2)
 , (3.3)
, (3.3)
де nді – поточне значення кількості обертів колінчастого вала дизеля, хв-1. Приймається із технічної характеристики або зовнішньої швидкісної характеристики дизеля;
rк – робочий радіус ведучих коліс, м;
ітрz – передаточне число трансмісії трактора на z-й передачі.
Приймається із технічної характеристики трактора або
розраховується;
wк – кутова частота обертання ведучих коліс, с-1;
tзв – крок ланки гусениці, м;
zзв – кількість ланок, які укладуються на окружності ведучого
колеса, шт;
nк – кількість обертів ведучої зірочки, хв-1.
Числові значення tзв і zзв приймаються із технічної характеристики трактора-прототипа.
Кількість обертів ведучої зірочки в хв-1 визначається за залежністю
 . (3.4)
. (3.4)
За один оберт ведучого колеса (зірочки) трактор пройде шлях, рівний довжині ланок гусениці, які укладуються на окружності колеса. Аналітично це можливо записати так

 (3.5)
(3.5)
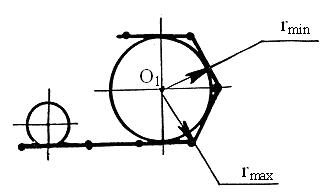
Рис. 3.1. Робочі радіуси коліс рушія гусеничного трактора:
О1 – вісь веденого колеса; rmin і rmax – мінімальний і максимальний робочі радіуси коліс
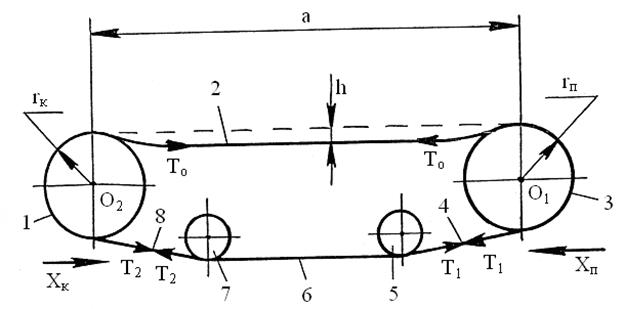
Рис. 3.2. Сили, які діють на гусеничний рушій:
а – довжина прольоту провисаючої ділянки гусениці; rк і rп – робочі радіуси ведучого і веденого коліс; h – стріла провисання гусениці; То – сила натягу провисаючої ділянки гусениці; Т1 і Т2 – сили натягу лобової і ведучої ділянок гусениці; О1 і О2 – вісь веденого і ведучого коліс; хк – штовхаюча сила; хп – складові лобового опору; 1 – ведуче колесо; 2 – верхня провисаюча частина гусениці; 3 – ведене (направляюче) колесо; 4 – передня направляюча (лобова) частина гусениці; 5,7 – передній і задній опорні котки; 6 – нижня
опорна частина гусениці; 8 – задня ведуча частина
|
|
|
Із формули (3.5) визначаємо робочий радіус ведучого колеса
 . (3.6)
. (3.6)
В зв’язку з тим, що радіус ведучого колеса величина не постійна, то поступальна швидкість також не постійна і коливається з періодом
 . (3.7)
. (3.7)
3.2. Динаміка гусеничного рушія. Сили і моменти,
які діють на гусеничний рушій
Приймаємо наступні припущення: трактор рухається на горизонтальній ділянці твердої дороги; рух рівномірний і трактор рухається вперед.
Замкнутий гусеничний обід (ланцюг) огинає чотири деталі: ведуче колесо 1 (рис. 3.2); натяжне (напрямне) колесо 3; передній 5 і задній 7 опорні котки.
На гусеничному ободі виділяємо чотири ділянки: задню ведучу 8; верхню провисаючу 2; передню направляючу (лобову) 4; нижню опорну 6.
У провисаючій ділянці створюються сили натягу Т0 , які приблизно можливо рахувати одинаковими у всіх точках і визначати за формулою
 , (3.8)
, (3.8)
де а – довжина прольота провисаючої ділянки, м;
q – вага одиниці довжини гусениці, кг/м;
h0 – відносне провисання гусениці;
g – прискорення вільного падіння;
V0 – швидкість перемотування гусениці по ободу, м/с.
Значення а і q приймаються із технічної характеристики трактора або визначаються експериментально; V0 – розраховується або визначається експериментально.
Відносне провисання гусениці дорівнює
 , (3.9)
, (3.9)
де h – стріла провисання гусениці, м.
Перший член правої частини рівняння (3.9) характеризує статичний (попередній) натяг гусениці, а другий – динамічні дії на гусеницю під час руху. Значення першого члена обмежується підтримуючими роліками. Вели-
чина другого характеризує відцентрові сили, які розтягують провисаючу час-
тину гусениці.
Ведуча частина гусениці натягнута силою Т2, величина якої визначається із рівняння моментів сил, які діють на рушій, відносно вісі О2 ведучого колеса. Рівняння моментів має наступний вигляд
(Т2 – Т0) · rк = hвед.уч. Мк, (3.10)
де h вед.уч. – коефіцієнт корисної дії, який враховує втрати на ведучій ділянці гусеничного ланцюга;
Mк – крутний момент на окружності ведучого колеса, Н·м.
Виконуємо наступні арифметичні дії
Т2 rк – Т0 rк = hвед.уч Мк; (3.11)
Т2 rк = hвед.уч. Мк + Т0 rк. (3.12)
Звідки
 . (3.13)
. (3.13)
Натягування Т1 лобової ділянки гусениці повинно забезпечувати обертання направляючого колеса навколо вісі О1. При розгляданні рівномірного руху цю умову записують так
(Т1 – Т0) rп = Мfп , (3.14)
де rп – робочий радіус веденого колеса, м;
Мfп – момент опору обертанню направляючого (веденого)
колеса, Н·м.
Виконуємо наступні арифметичні дії
Т1 rп – Т0 rп = Мfп; (3.15)
Т1 rп = Мfп + Т0 rп. (3.16)
Звідки
 , (3.17)
, (3.17)
де Рfп – сила опору перекочування веденого колеса, Н. Сила Рfп позна- чається також літерами Хп і називається складовою лобового опору.
Рівняння (3.13) можемо записати дещо іншим способом
 , (3.18)
, (3.18)
де Рк – дотична сила тяги на окружності ведучого колеса, Н. Ця ж сила також позначається літерами Хк і називається штовхаючою силою.
На опорну ділянку гусениці діють вертикальні сили, які обумовлені ваговими навантаженнями і дотичними реакціями.
Сила опору перекочування дорівнює
 , (3.19)
, (3.19)
де Мг – момент опору, який створюється в самому рушії, Н·м.
Сила лобового опору в Н визначається за залежністю
 , (3.20)
, (3.20)
де G – вага, яка приходиться на рушій, Н;
hк – глибина колії, м;
L – довжина опорної поверхні гусениці, м.
Коефіцієнт корисної дії гусеничного рушія дорівнює
hг = hf hd, (3.21)
де hf – коефіцієнт корисної дії, який враховує втрати на перекочування;
ηδ – коефіцієнт корисної дії, який враховує втрати на буксування.
Числові значення складових правої частини рівняння (3.21) визначаються за залежностями
 ; (3.22)
; (3.22)
 , (3.23)
, (3.23)
де Vд – дійсна швидкість руху трактора, км/г.
3.3. Центр тиску гусеничного трактора і його зміщення відносно
середини опорної поверхні гусениці
Приймаємо наступні припущення: трактор рухається прямолінійно; рух змінний (j≠0); трактор рухається на під’йом; до трактора прикладена сила тяги на гаку.
Схема сил, які діють на трактор у цьому випадку, приведена на рис. 3.3. На трактор діють: вага трактора G, H; сила інерції Pj поступально рухомих маc трактора, H; тяговий опір (сила тяги) на гаку Рг, H. Складовими Рr є: паралельна поверхні дороги – Ргcosγг і перпендикулярна – Ргsіnγг; реакції грунту, паралельні поверхні дороги: штовхаюча сила Хк і складова лобового опору Хп; результуюча реакція У всих нормальних реакцій грунту, які діють на окремі ланки гусениць, з урахуванням нормальної складової лобового опору.
При роботі трактора в таких умовах його тягово-економічні показники залежать від величини зміщення точки Д прикладання результуючих реакцій У від середини опорної поверхні гусениць.
Для визначення величини зміщення центра тиску Хд необхідно склас- ти рівняння моментів сил, які діють на трактор відносно центра тиску точки Д. При цьому приймаємо наступні припущення: із-за малих значень gгРгcosgг » Рг; моментами інерції дотичних сил деталей дизеля і трансмісії, які обертаються і встановлені на поперечних валах, нехтуємо; моментами дотичних сил інерції рухомих ланок гусеничних ланцюгів нехтуємо.
|
|
|
|
|
Дата добавления: 2017-02-01; Просмотров: 85; Нарушение авторских прав?; Мы поможем в написании вашей работы!