КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Рівняння (3.44) можемо записати наступним чином 4 страница
|
|
|
|
Якщо поділити різницю Рк – Рw на вагу автомобіля G ми одержимо питомий показник, який академік Д.А. Чудаков запропонував називати динамічним фактором
 (6.7)
(6.7)
де Д - динамічний фактор автомобіля: безрозмірний показник, що характеризує любий автомобіль незалежно від його вантажопід¢ємності. Він визначає запас сили тяги на одиницю ваги автомобіля і є вимірювачем його динамічних властивостей;
G - повна вага автомобіля, Н.
Із рівняння (6.7) видно, що динамічний фактор залежить від приведенного сумарного коефіцієнта опору дороги і відносного прискорення.
Динамічна характеристика при сталому русі (j = 0) обчислюється за залежністю (6.7), яка має такий вигляд
де G0 - власна вага автомобіля, Н.
Дотична сила тяги Рк визначається крутним моментом двигуна або зчепленням ведучих коліс з дорогою. Динамічний фактор по двигуну
 (6.8)
(6.8)
а по зчепленню  (6.9)
(6.9)
Динамічна характеристика автомобіля є графічне зображення залежності динамічного фактору від швидкості руху. Швидкість визначається як  , км/г на всьому діапазоні частоти обертання колінчастого валу від nmin до nmax.
, км/г на всьому діапазоні частоти обертання колінчастого валу від nmin до nmax.
У розрахункову формулу підставляють ряд числових значень Мд, відповідаючих різним задаваним числам частоти обертання колінчастого валу двигуна n та швидкостям руху V автомобіля
Режим роботи двигуна з максимальним крутним моментом відповідає максимальному значенню (точки перегину кривої) динамічного фактору на кожній передачі.
Результати розрахунку динамічної характеристики автомобіля приведені в табл. 6.1. На рис. 6.2 приведено загальний вигляд характеристики.
На рис. 6.2 прийняті такі умовні позначення:  - неробоча частина зовнішньої швидкісної характеристики двигуна при збільшенні навантаження. На цій ділянці характеристики двигун працює при розгонах від мінімально-стійкої кількості обертів холостого ходу до максимальної кількості обертів холостого ходу при номінальному навантаженні; Мдmax (Меmax) – максимальний крутний момент двигуна Н×м; Д1max …Д5max – максимальний динамічний фактор автомобіля на 1 …5 передачах відповідно;
- неробоча частина зовнішньої швидкісної характеристики двигуна при збільшенні навантаження. На цій ділянці характеристики двигун працює при розгонах від мінімально-стійкої кількості обертів холостого ходу до максимальної кількості обертів холостого ходу при номінальному навантаженні; Мдmax (Меmax) – максимальний крутний момент двигуна Н×м; Д1max …Д5max – максимальний динамічний фактор автомобіля на 1 …5 передачах відповідно;
|
|
|
Таблиця 6.1
Результати розрахунку динамічної характеристики проектуємого автомобіля
| nд, хв-1 | V, км/г | Ме, Н∙м | Рк, Н | Рw, Н | D | |
| с = 1 | с = 2 | |||||
| І передача | ||||||
| 15,07 | 50,53 | 0,68 | 0,243 | |||
| 17,81 | 620,78 | 70,6 | 0,698 | 0,248 | ||
| 19,46 | 623,09 | 84,3 | 0,7 | 0,248 | ||
| 21,10 | 621,14 | 0,697 | 0,247 | |||
| 22,75 | 614,74 | 0,689 | 0,245 | |||
| 24,39 | 604,4 | 132,4 | 0,676 | 0,240 | ||
| 26,03 | 589,6 | 0,659 | 0,234 | |||
| 28,78 | 462,7 | 184,3 | 0,514 | 0,1873 | ||
| ІІ передача | ||||||
| 19,79 | 0,519 | 0,184 | ||||
| 23,39 | 620,78 | 0,528 | 0,188 | |||
| 25,55 | 623,09 | 0,529 | 0,188 | |||
| 27,71 | 621,14 | 170,8 | 0,526 | 0,187 | ||
| 29,86 | 614,74 | 198,4 | 0,52 | 0,185 | ||
| 32,02 | 604,4 | 0,509 | 0,181 | |||
| 34,18 | 589,6 | 0,495 | 0,176 | |||
| 37,78 | 462,7 | 317,6 | 0,384 | 0,136 | ||
| ІІІ передача | ||||||
| 25,99 | 150,3 | 0,391 | 0,139 | |||
| 30,72 | 620,78 | 0,397 | 0,141 | |||
| 33,55 | 623,09 | 250,4 | 0,397 | 0,141 | ||
| 36,39 | 621,14 | 294,6 | 0,394 | 0,140 | ||
| 39,22 | 614,74 | 342,3 | 0,387 | 0,138 | ||
| 42,06 | 604,4 | 393,6 | 0,378 | 0,134 | ||
| 44,89 | 589,6 | 448,4 | 0,366 | 0,13 | ||
| 49,62 | 462,7 | 547,8 | 0,278 | 0,099 | ||
| ІV передача | ||||||
| 34,05 | 0,304 | 0,108 | ||||
| 40,25 | 620,78 | 360,5 | 0,306 | 0,109 | ||
| 43,96 | 623,09 | 0,304 | 0,108 | |||
| 47,68 | 621,14 | 505,8 | 0,299 | 0,106 | ||
| 51,39 | 614,74 | 587,6 | 0,292 | 0,104 | ||
| 55,10 | 604,4 | 675,5 | 0,283 | 0,101 | ||
| 58,82 | 589,6 | 769,8 | 0,271 | 0,096 | ||
| 65,00 | 462,7 | 0,198 | 0,07 |
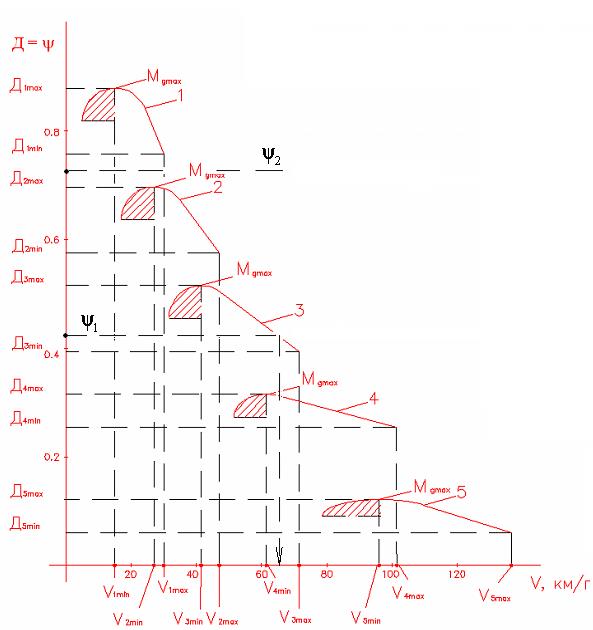
Рис. 6.2. Загальний вигляд динамічної характеристики автомобіля
Д1min …Д5min – мінімальний динамічний фактор автомобіля на 1 …5 передачах відповідно; Vmin1…Vmin5 – мінімально-можлива швидкість руху автомобіля на 1 …5 передачах, км/г; Vmax1 …Vmax5 – максимально можлива швидкість руху автомобіля на 1…5 передачах, км/г.
|
|
|
За допомогою динамічної характеристики можливо вирішувати такі задачі, які мають місце в процесі експлуатації автомобіля:
1. Визначати на яких передачах може працювати автомобіль в заданих (шляхових) умовах, що характеризуються сумарним приведеним коефіцієнтом опору дороги y, і які максимальні швидкості зможе він розвивати при рівномірному русі;
2. Визначити найбільший шляховий опір, який зможе долати автомобіль при рухові на певній передачі при рівномірному русі;
3. Визначити кути під¢йому лінії шляху, які автомобіль може долати в заданих шляхових умовах на різних передачах, і швидкості руху при цьому.
Для прикладу розглянемо два випадки руху автомобіля: 1-й характеризується величиною Д = y1, а 2-й – Д = y2.
На осі ординат точкою позначаємо значення y1. Через отриману точку проводимо пунктирною лінією додаткову вісь абсцис. Із точки перетину додаткової вісі абсцис з кривою робочої частини динамічного фактора любої передачі (на рис.6.2 – 3-ї передачі) проводимо до основної вісі абсцис додаткову ординату. В точці перетину додаткової ординати з основною віссю абсцис знаходиться значення швидкості руху автомобіля.
У другому випадку руху автомобіля додаткова вісь абсцис не перетинається ні з однією кривою динамічного фактора. Це значить, що на 2-й передачі автомобіль не може працювати із-за перевантаження двигуна, а на 1-й передачі він буде працювати з недовантаженням. При цьому буде меншою швидкість руху і більшою витрата палива.
По загальному вигляду кривих динамічної характеристики можливе визначення правильності (на даний момент) розрахунку автомобіля. При правильно підібраних вихідних даних; прийнятих параметрів, у межах рекомендованих, криві повинні розташовуватись так, щоб виконувалась умова: Vmax1 > Vmin2 і тому подібне. У цьому випадку автомобіль може працювати (його можливо розігнати від Vmin1 до Vmax5 ).
Динамічна характеристика використовується для аналізу роботи порожнього автомобіля. Для аналізу динамічних якостей автомобіля з вантажем чи автопотягу при різних варіантах вагового навантаження використовується універсальна динамічна характеристика. Вона будується по методу Н. А. Яковлєва. Для цього на динамічній характеристиці наноситься додаткова верхня вісь абсцис, на якій відкладається коефіцієнт завантаження автомобіля, який позначається літерою Г або С.
|
|
|
Коефіцієнт завантаження автомобіля знаходиться за рівнянням
 (6.10)
(6.10)
де G - повна вага автомобіля, Н;
G0 - власна вага автомобіля, Н.
Універсальна динамічна характеристика розраховується і будується в наступній послідовності:
1. Із зовнішньої швидкісної характеристики двигуна (табл. 6.2 і рис.6.3) в табл. 6.1 заносяться поточні значення кількості обертів вала від nмін до nн. Значення кількості обертів записують для кожної передачі;
2. Із зовнішньої швидкісної характеристики двигуна (табл. 6.2) в табл. 6.1 заносяться поточні значення ефективного крутного момента Мд для вказаних значень кількості обертів вала двигуна;
3. Розраховуються поточні значення швидкості руху автомобіля для вказаних значень кількості обертів вала двигуна. Результати розрахунків заносяться в табл. 6.1.
Нижче для прикладу приведемо результати розрахунків для номінального режиму на першій передачі

4. Розраховуються поточні значення сили опору повітря для вказаних значень швидкості руху автомобіля. Результати розрахунків заносяться в табл. 6.1.
Нижче для прикладу приведемо результати розрахунків для номінального режиму на першій передачі
5. Для вказаних поточних значень Мд розраховуються поточні значення дотичної сили тяги на окружності ведучого колеса. Результати розрахунків заносяться в табл. 6.1.
Нижче для прикладу приведемо результати розрахунків для номінального режиму на першій передачі

6. Визначається значення динамічного фактора Д0 порожнього автомобіля (С = 1) для кожної передачі. Результати розрахунків заносимо в табл. 6.1;
7. Визначається значення динамічного фактора Д автомобіля з вантажем (С=2) для кожної передачі. Результати розрахунків заносимо в табл. 6.1;
Таблиця 6.2
Результати розрахунку зовнішньої швидкісної характеристики автомобільного карбюраторного двигуна
| № п/п | nд, хв-1 | Nе, кВт | Мд, Н·м |
| 1. | 70,00 | 608,00 | |
| 2. | 84,46 | 620,78 | |
| 3. | 92,60 | 623,09 | |
| 4. | 100,11 | 621,14 | |
| 5. | 106,80 | 614,74 | |
| 6. | 112,60 | 604,40 | |
| 7. | 117,24 | 589,60 | |
| 8. | 101,70 | 462,70 |
|
|
|
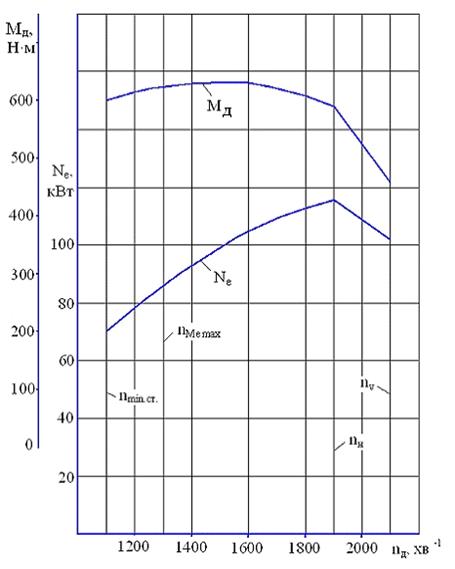
Рис. 6.3. Приблизна швидкісна характеристика карбюраторного двигуна проектуємого автомобіля
8. На міліметровому аркуші паперу проводимо основну вісь абсцис характеристики (рис. 6.4). Позначаємо її літерами: V, км/г. На вісь абсцис наносимо масштабну шкалу з кроком 10 км/г. На вісі позначаємо точками поточні значення швидкості для кожної передачі. Через отримані точки проводимо вгору додаткові вісі ординат;
9. З точки початку вісі абсцис, вгору, проводимо вісь ординат. Позначаємо її літерою D. На вісь ординат наносимо масштабну шкалу з кроком 0,1;
10. На відповідних додаткових ординатах у вибраному масштабі відкладаємо значення Do із табл. 6.1. Отримані точки з'єднуємо. Отримані криві кожної передачі нумеруємо римськими цифрами. На відповідних кривих знаходимо мінімальне і максимальне значення Do. Для вказаних значень Do знаходимо відповідні значення V;
11. З точки закінчення вісі ординат, паралельно основній вісі абсцис, проводимо додаткову вісь абсцис. Позначаємо її літерою С (Г). На додаткову вісь абсцис наносимо масштабну шкалу: при V = 0, C = 1; значення С, розраховане по формулі (6.10) розташовуємо на додатковій ординаті, що відповідає VмахIV; розв'язавши відповідну арифметичну пропорцію на масштабну шкалу наносимо значення С = 1,5 і С = 2,0;
12. Через точки С = 1,5 і С = 2,0, вниз, проводимо додаткові ординати. На додаткових ординатах наносимо відповідні масштабні шкали;
13. Через однойменні точки шкал проводимо додаткові лінії;
14. Виконуємо аналіз динамічної і універсальної динамічної характеристики автомобіля.
Критична швидкість по тязі на кожній передачі Vкр І, Vкр ІІ,…Vкр z відповідає значенням максимального динамічного фактора Дmax, тобто роботі двигуна при Мд max і є максимально припустимою швидкістю руху автомобіля з номінальним навантаженням.
Максимальні приведені коефіцієнти сумарного опору дороги ψI max, ψII max,…ψz max, що долається автомобілем на даній передачі визначаються проекціями точок Д max на вісь ординат. Подолання максимальних під’йомів при малих кутах (3…50) і = Д – f, з використанням інерції  При кутах підйому до 100 α = arcsin(Д – f), а при більших кутах підйому
При кутах підйому до 100 α = arcsin(Д – f), а при більших кутах підйому
При відомих дорожніх умовах (коефіцієнт кочення f1), або при приведеному коефіцієнті сумарного опору дороги ψ1 проекція точки перетину горизонталі f1 або ψ1 з одною із кривих Д = f (V) на вісь абсцис визначить максимально сталу швидкість руху.
Універсальна динамічна характеристика (динамічний паспорт) автомобіля дозволяє проаналізувати динамічні якості з різною
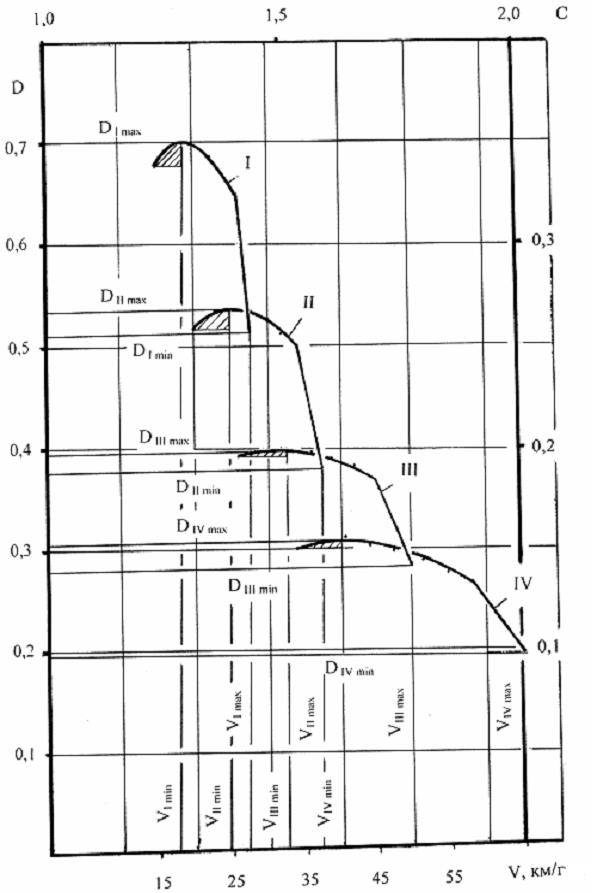
Рис. 6.4. Універсальна динамічна характеристика проектуємого автомобіля
експлуатаційною вагою G' автомобіля. Динамічний фактор Д' автомобіля з експлуатаційною вагою G' більше чи менше динамічного фактора Д автомобіля з номінальним навантаженням загальною вагою G у відношенні
 Тоді
Тоді  .
.
Максимальне значення динамічного фактора на нижчій передачі для вантажних автомобілів високої прохідності ДІ max = 0,7…0,8; дорожньої прохідності ДІ max = 0,35…0,45; для легкових автомобілів середнього та великого літражу ДІ max ≈ 0,5. Мінімальне значення динамічного фактору на вищій передачі ДІ max = 0,03…0,09.
6.3. Гальмівні властивості автомобіля
6.3.1. Процес гальмування автомобіля
Необхідність в гальмуванні транспортного засобу може виникнути: при необхідності зменшити швидкість руху або зупинити автомобіль; при обмеженні надмірного підвищення швидкості; на великих схилах; при утриманні машини у нерухомому стані на зупинках.
Здатність до примусового зниження швидкості і швидкій зупинці – найважливіша динамічна властивість машини, впливаюча на її експлуатаційні показники і маюча велике значення для безпеки руху. Зниження швидкості перешкоджає накопиченню машиною при русі кінетичної енергії, яку потрібно погасити. З цією метою створюють додаткові і штучні опори руху.
Основне джерело додаткових опорів руху – система гальм за допомогою якої створюються моменти тертя, перешкоджаючі обертанню коліс. В якості гальмівного засобу використовують також двигун, який у цьому випадку не відокремлюють від трансмісії і приводиться в обертання від коліс. Поряд із штучно створеними опорами на машину при гальмуванні діє ще опір дороги і повітря, які також впливають на уповільнення руху.
Гальмові характеристики визначають здатність колісної машини за можливо короткий час зменшити швидкість до повної зупинки і мати при цьому мінімальний гальмівний шлях – відстань, яку проходить машина від початку гальмування до повної зупинки. Оціночними параметрами ефективності гальмівної системи є гальмівний шлях Sг і максимально можливе уповільнення jу. Гальмівний шлях залежить від початкової швидкості колісної машини, її ваги, уповільнення. Гальмівний шлях вимірюється дослідним шляхом.
При гальмуванні колісної машини з початкової швидкості 30 км/г при русі по сухій горизонтальній асфальтобетонній дорозі гальмівний шлях не повинен перевищувати технічних вимог.
При напруженому русі машини максимальне уповільнення повинно бути високим і по можливості однаковим для різних моделей, які рухаються у потоці. Повинні бути, по можливості, однаковими і близькими довжини гальмових шляхів (з допуском ± 10…15%). Але гальмівний шлях машини великої вантажопід’ємності, особливо тих, що працюють з причепами, значно більше гальмівного шляху машин малої вантажопід’ємності.
Із зростанням швидкості руху колісних машин повинно збільшуватися максимальне уповільнення при гальмуванні до 9 м/с і більше. Синхронність зростання і зменшення кривої гальмового моменту кожного гальма повинна бути максимальною.
Час спрацювання гальмівного приводу повинен бути мінімальним. Гальмівні моменти окремих коліс, пропорційні їх зчіпній вазі, повинні виключати рух коліс ковзанням. Допустиме відхилення гальмівних сил на колесах кожної вісі не повинне перевищувати 15% найбільшого значення гальмівної сили.
Відвід тепла від поверхні тертя гальм повинно бути максимальним. Коефіцієнт тертя між барабаном (диском) і накладками повинен бути високим і стабільним. Захист пар тертя гальмівного механізму від зволоження та забруднення повинен бути надійним. «Писк» не повинен мати місця при всіх режимах гальмування.
При поломці фіксатора автопотяга гальмівні пристрої причепів повинні забезпечувати його автоматичну зупинку. Міцність гальмівних механізмів повинна бути гарантованою. Гальмівні механізми не повинні виходити із ладу на протязі усього часу роботи колісної машини у любих умовах експлуатації, так як від їх надійності залежить безпека руху.
Гальмівні режими розділяють на екстренний (аварійний), що відповідає максимальній інтенсивності гальмування і складає 2…3% загального числа гальмувань в залежності від кваліфікації водія і умов руху, і службовий – переважаючий, що складає 97…99% загального числа гальмувань.
Гальмівна система включає гальмівні механізми, розміщені на колесах автомобіля або у трансмісії, гальмівні приводи з органами керування і регулюючі пристрої.
Гальмівні механізми колісних машин кваліфікують наступним чином. По-перше, по числу і розміщенню гальмівних механізмів. Як правило, гальмівні механізми розміщені на всіх колесах. По-друге, по конструкції. Серед гальмівних механізмів з механічним тертям розповсюджені колодкові гальма з колодками, розміщеними в середині барабанів. Дискові гальма знаходять велике розповсюдження, особливо на легкових автомобілях. Стрічкові гальма застосовують у планетарних коробках передач і для стоянкових гальм на вихідних валах коробок передач, роздавальних коробок і ведучих валах головних передач.
Гальмівні приводи автомобілів класифікують по типу приводу, виду робочого тіла та джерела енергії для гальмівних систем, способу передачі гальмівного зусилля від педалі (ричага) до гальм і ступені автоматизації.
Для вантажних колісних машин з повною масою до 4 т застосовують, як правило, гідравлічні приводи з дією безпосередньо від водія (привід прямої дії). На більш важких моделях колісних машин з повною масою більше 5 т у гальмовий привід включають підсилюючі пристрої, які підвищують зусилля водія, яке прикладається до педалі у 3-5 разів. Підсилювачі працюють під дією різниці тисків у впускному трубопроводі карбюраторного двигуна і атмосферного і під дією тиску робочого тіла (рідини або повітря), який створюється насосом, що приводиться в дію двигуном автомобіля.
Відповідність тиску на гальмову педаль, колодки або диски гальмів забезпечує слідкуючий пристрій розподільного механізму.
На колісних машинах великої маси (більше 8…10 т) використовують пневматичний, пневмо-, гідро- або електропривод чи їх комбінацію.
Тягові і гальмові властивості автомобіля тісно пов’язані між собою. Чим більша середня швидкість руху автомобіля, тим більше уваги необхідно приділити забезпеченню безпеки його руху, отже, тим краще повинні бути гальмові властивості автомобіля.
У процесі гальмування кінетична енергія автомобіля переходить у роботу тертя. Тепло, яке при цьому утворюється, розсіюється в навколишню атмосферу. Таким чином, гальмування супроводжується непоправними втратами, і увібрана гальмами кінетична енергія не може бути використана для подальшого руху автомобіля. При цьому будь-яке гальмування автомобіля неминуче пов’язано з деяким збільшенням витрат палива. При службовому гальмуванні основна частина тепла утворюється між накладками гальмових колодок і барабанів, а при екстренному гальмуванні, коли колеса доводяться до «ковзання», т.б. блокуються – між шиною і дорогою.
Можливі декілька способів гальмування автомобіля: гальмування тільки гальмовою системою; сумісне гальмування гальмовою системою і двигуном; гальмування тільки двигуном; гальмування періодично дією гальмової системи.
6.3.2. Гальмова сила на колесах автомобіля
При гальмуванні сили тертя створюють пару сил на плечі, рівному внутрішньому діаметру барабана. Ця пара сил створює момент тертя Мтер, який направлений в бік, протилежний коченню колеса, а між колесом і дорогою виникає гальмове зусилля Рг. Максимальне гальмове зусилля Рг max, яке може бути створене на колесі, рівне силі зчеплення колеса з дорогою. При наявності гальм на усіх колесах автомобіля (рис. 6.5) максимальне гальмове зусилля між колесами і дорогою становить
Рг max = Рг1 + Рг2 = У п · φ + Ук · φ = (Ук + У п)φ. (6.11)
Так як Ук + У п = G, то
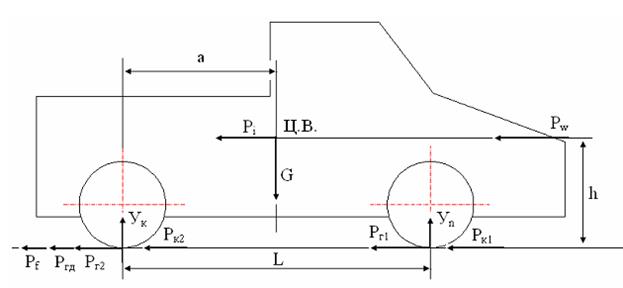
Рис. 6.5. Схема сил, діючих на автомобіль при гальмуванні
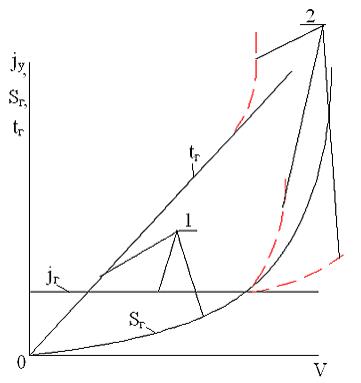
Рис. 6.6. Залежність шляху, часу і уповільнення при гальмуванні від швидкості автомобіля (1 – лінії побудовані з урахуванням дії сил Рк, Рw, Рf, а 2 – без урахування дії цих сил)
Рг max = Gφ.
Для сухої асфальтованої дороги φmax = 0,8…0,9. У цьому випадку гальмове зусилля може досягнути величини, рівної (0,8…0,9) G – ваги автомобіля.
При проектуванні гальм необхідно досягнути гальмівного моменту Мг, який би міг довести колеса до ковзання на сухій асфальтобетонній дорозі при повному завантаженні автомобіля.
6.3.3. Рівняння руху автомобіля при гальмуванні
Рівняння руху автомобіля при гальмуванні у загальному вигляді одержимо при проекції всіх сил на горизонтальну площину, які діють на
автомобіль у даний момент
Рг1 + Рг2 + Рк1 + Рк2 + Рw + Pт.д. + Рf – Рj = Рг + Рк + Рw + Рт.д. + Рf – Рj = 0,
де Рг = Рг1 + Рг2 – сумарна гальмівна сила ведучих і ведених коліс;
Рк = Рк1 + Рк2 – сумарна дотична сила тяги ведучих і ведених коліс;
Рт.д. – сила тертя у двигуні, яка приведена до ведучих коліс.
Числове значення Рт.д. визначається за залежністю
 (6.12)
(6.12)
Момент тертя у двигуні в Н·м для nд = 2000…4000 хв-1 можливо підрахувати приблизно по імперичній формулі
Мт.д. = Vh (а1nд + в1),
де Vh – робочий об’єм (літраж) двигуна, л;
а1, в1 – коефіцієнти апроксимації. Числові значення коефіцієнтів а1 = 0,0008; в1 = 1,5 (0,15) – для карбюраторних двигунів; а1 = 0,001; в1 = 1,0 (0,1) – для дизелів.
Розглянемо процес гальмування автомобіля тільки гальмівною системою. У цьому випадку Рт.д. = 0. Враховуючи, що швидкість руху автомобіля в процесі гальмування зменшується, можливо припустити Рw = 0. У зв’язку з чим сила Рf мала у порівнянні з Рг, нею можливо знехтувати при практичних розрахунках, особливо при екстренному гальмуванні. Ці припущення дають незначний запас гальмових властивостей автомобіля. Таким чином рівняння руху автомобіля буде мати вигляд
Рг + Рд– Рj = 0. (6.13)
З урахуванням значень сил рівняння (6.13) записуємо так
 (6.14)
(6.14)
Звідки
 (6.15)
(6.15)
6.3.4. Вимірювачі гальмових якостей автомобіля
Основними вимірювачами гальмових якостей автомобіля є: максимальне уповільнення при гальмуванні jу (м/с2), мінімальний час уповільнення t (с) та гальмовий шлях Sг (м).
Уповільнення при гальмуванні автомобіля. Вирішуючи рівняння (6.15) відносно уповільнення jу, одержимо
|
|
|
|
|
Дата добавления: 2017-02-01; Просмотров: 81; Нарушение авторских прав?; Мы поможем в написании вашей работы!