КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Рівняння (3.44) можемо записати наступним чином 6 страница
14. На вісі абсцис точками позначаємо поточні значення швидкості руху автомобіля (табл. 6.3). Через отримані точки проводимо допоміжні вісі ординат;
15. Проводимо основну вісь ординат характеристики. Позначаємо її літерами: Qs, л/100 км. На вісь наносимо масштабну шкалу. Для даної характеристики приймаємо крок 5 л/100 км;
16. На відповідних допоміжних вісях ординат у вибраному масштабі відкладаємо поточні значення витрати палива на 100 км шляху для кожного значення ψ;
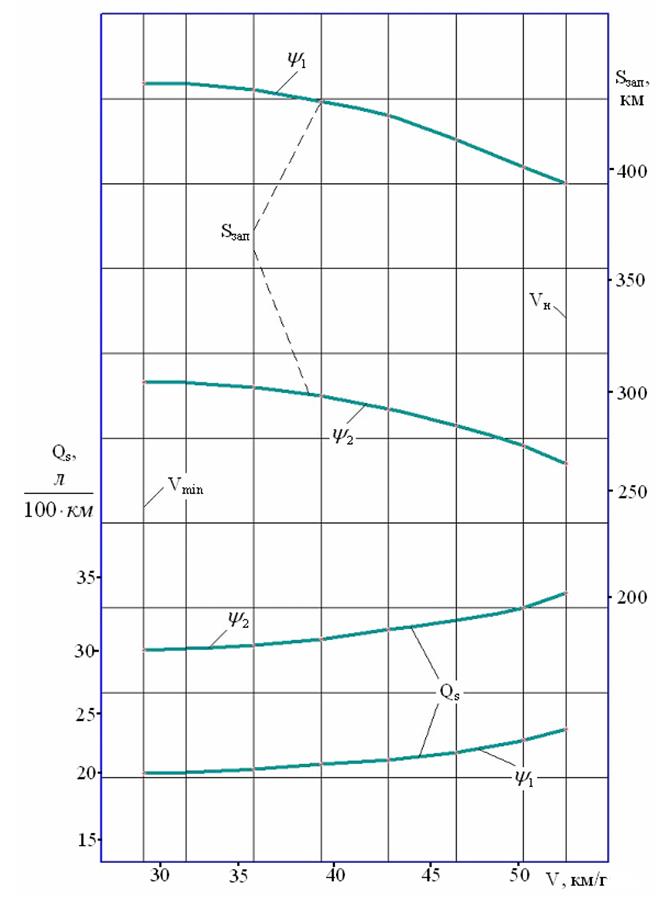
Рис. 6.9. Паливна характеристика проектуємого автомобіля
17. З'єднуємо отримані точки. Лінії позначаємо літерами: Qs, ψ1, ψ2;
18. Проводимо додаткову основну вісь ординат характеристики. Позначаємо її літерами: Sзап, км. На вісь наносимо масштабну шкалу. Для даної характеристики приймаємо крок 50 км.
19. На відповідних допоміжних вісях ординат у вибраному масштабі відкладаємо поточні значення запасу хода для кожного значення ψ;
20. З'єднуємо отриманні точки. Лінії позначаємо літерами: Sзап, ψ1, ψ2.
Питання для самопідготовки та самоконтролю
1. Що таке динамічний фактор автомобіля і по якій залежності його знаходять при сталому та змінному русі?
2. Як побудувати універсальну динамічну характеристику автомобіля та які задачі, що виникають при експлуатації автомобіля, можна вирішити за допомогою цієї характеристики?
3. Перерахуйте головні оціночні параметри динаміки розгону автомобіля і методи їх визначення.
4. Як будують графіки прискорення та шляху розгону?
5. Як визначити при тяговому розрахунку автомобіля потужність двигуна та передаточних чисел трансмісії (швидкості руху автомобіля)?
6. Диференціальне рівняння руху автомобіля при гальмуванні, його аналіз.
7. Якими аналітичними рівняннями оцінюються показники інтенсивності гальмування?
8. Як визначити при гальмуванні з відключеним двигуном: максимальне уповільнення, мінімальний шлях гальмування, повний гальмівний шлях, мінімальний час гальмування?
9. Перерахуйте і дайте характеристику головних параметрів, що впливають на ефективність гальмування з відключеним двигуном.
10.Яка головна вимога гальмування з невідокремленим двигуном (гальмування двигуном)?
11.Методика побудови економічної характеристики автомобіля.
12.Які головні показники паливної економічності автомобіля, їх аналітичні визначення?
7. Тягова динаміка повнопривідних
тракторів та автомобілів
Умови рівності дійсних поступальних швидкостей передніх та задніх коліс записуються так

Vтк(1-δк) = Vтn(1-δn), (7.1)
де Vтк і δк – теоретична швидкість та буксування забігаючих ведучих коліс;
Vтn і δn – теоретична швидкість та буксування відстаючих ведучих коліс.
Коефіцієнт кінематичної невідповідності дорівнює
 . (7.2)
. (7.2)
Блокуючий привід ведучих вісей мають трактори МТЗ-82, Т-40, К-701 та інші, автомобілі ГАЗ-66 та інші.
Універсальні колісні трактори мають rn = (0,55…0,65) rк.
Для досягнення Кн=1 необхідно Vтn= Vтк= ωn · rк = (0,55…0,65) rк · ωn.
Кутова швидкість задніх ведучих коліс ωк = (0,55…0,65) ωn, а передніх – ωn = (1,54…1,82) ωк.
Кутова швидкість передніх ведучих коліс у порівнянні з розрахунковою ωn = (1,54…1,82) ωк знижується на 8…10 %.
Паразитна потужність становить
Nпар = (Ркn - Рfn) · V (1 – ήтр), (7.3)
де Ркn – повне значення від'ємної дотичної сили тяги передніх (відстаючих) коліс;
ήтр – ККД передачі від переднього ведучого моста до заднього (ККД трансмісії без урахування ККД коробки передач).
Муфта вільного ходу (обгінна муфта) блокує циркуляцію паразитної потужності і включається при буксуванні задніх ведучих коліс δк = 3…5%, відключаючи автоматично передній міст при менших δк.
Статичне навантаження на передній ведучий міст Gnст = (0,35…0,4)G, оптимальне динамічне навантаження Gnопт= 0,43G.
У тракторів загального призначення 4х4 і колесами однакового типорозміру Gnст = (0,54…0,58)G і Gкст = (0,42…0,46)G. Більш навантажені колеса стають відстаючими.
Сумарний ведучий момент дорівнює
Мк = Мкn + Мкк = Ркn · rn + Ркк · rк. (7.4)
Сумарна дотична сила тяги становить
Рк = Ркn + Ркк = φn · Gn + φк · Gк. (7.5)
Сумарне тягове зусилля дорівнює
Рк = Ркn + Ркк = (Ркn - Рfn) + (Ркк - Рfк) = (φn - fn) Gn + (φк – fк) Gк. (7.6)
Диференційний привід ведучих вісей пропонується для автомобілів.
Симетричний простий диференціал застосовується при Gn = Gк та rк = rn (на вантажних автомобілях).
Несиметричний міжвісевий диференціал автомобілів типу МАЗ та ін. передає Мкn = 0,33 Мк і Мкк = 0,66 Мк в залежності від розподілу навантаже- ння на вісі.
Умови рівноваги сателітів записуються так
Р1 · r1 = Р2 · r2, (7.7)
де Р1 і Р2 – відповідно кругові зусилля на великому та малому вінцях сателітів.
Рівняння (7.7) можемо записати в іншому вигляді
 .
.
Крутні моменти, які передаються диференціалом, становлять
Мдиф.n= Р1· R1; Мдиф.к= Р2· R2. (7.8)
Передавальне число диференціала визначається за залежностями
 . (7.9)
. (7.9)
Значення Мдиф.п і Мдиф.к також можемо визначити так
 (7.10)
(7.10)
При r1 = r2 і R1 = R2 та ід =1, маємо
 (7.11)
(7.11)
7.1. Основні типи безступеневих автоматичних трансмісій тракторів та автомобілів
Безступеневі автоматичні трансмісії забезпечують роботу тракторів з тяговою характеристикою, яка наближена до потенційної. Двигун на всьому діапазоні тягових зусиль завантажений до номінальної потужності і працює у більш економічному режимі. При відхиленні тягового зусилля (опір с.г. машини та самопересування трактора) від номінального передаюче число трансмісії та швидкість руху трактора автоматично змінюються таким чином, що добуток Рг · V, який визначає тягову потужність і тяговий ККД трактора, знаходиться у зоні максимальних значень.
Окрім відмічених переваг безступеневі автоматичні трансмісії тракторів і автомобілів забезпечують покращення комфортабельності і значне спрощення керування; неможливість зупинки двигуна при русі у тяжких шляхових та ґрунтових умовах; збільшення часу роботи вузлів і деталей силової передачі, коліс, гусениць та двигуна.
Найбільше застосування у серійних та дослідних тракторах і автомобілях отримали такі типи безступеневих трансмісій:
- механічні фрикційні;
- електричні та електромеханічні;
- гідродинамічні (гідромеханічні);
- гідростатичні (гідрооб'ємні).
7.1.1. Фрикційна механічна трансмісія
Безступеневі фрикційні передачі з гнучким зв'язком використовують принцип дії клинопасового варіатора.
Передавальні числа трансмісії визначаються так
середнє (поточне)  (7.12)
(7.12)
максимальне  мінімальне
мінімальне  (7.13)
(7.13)
де Rср , Rmax, Rmin – середні, максимальні та мінімальні радіуси шківів варіатора;
X – переміщення рухомого диска варіатора;
Β = 20° – кут нахилу твірної диску (шківів) варіатора до вертикалі.
Діапазон регулювання визначається за залежністю
 (7.14)
(7.14)
і для стандартних клинових пасів становить  , а для широких клинових –
, а для широких клинових –  .
.
Для симетричних варіаторів при відомому (призначеному) ір зовнішній діаметр розраховується за формулою
 (7.15)
(7.15)
де α і h – поперечний переріз паса.
Осьове зусилля пружини становить
 , (7.16)
, (7.16)
де μ = 0,22…0,25 – коефіцієнт тертя паса по шківу.
Передавальне число трансмісії (варіаторів) автоматично регулюється за допомогою гідроциліндра 27 (рис 7.1). Робоча рідина від гідросистеми трактора через регулюючий золотник 4 надходить у порожнину 27 гідроциліндра. Тиск залежить від ступеня дроселювання отвору 5 золотником 4, який з’єднаний з регулятором кількості обертів вала двигуна. Для зупинки трактора рукояткою 1 переміщають золотник 4 так, щоб отвір 5 повністю відкрився.
Тороїдно-сферична передача з хордально розміщеними роликами (передача В.А. Світозарова) відноситься до типу безступеневих фрикційних передач з безпосереднім контактом (рис. 7.2, 7.3).
Діапазон регулювання такої передачі  знаходиться у межах ір = 4…6. Діапазон регулювання додаткової коробки передач становить ік = 2,5…3,0. Максимальне передавальне число дорівнює
знаходиться у межах ір = 4…6. Діапазон регулювання додаткової коробки передач становить ік = 2,5…3,0. Максимальне передавальне число дорівнює  Мінімальне передавальне число становить
Мінімальне передавальне число становить  .
.
Заміна коробки передач фрикційною передачею значно спрощує схему трансмісії.
На ведучому валу встановлено ведучий диск (шків) 1 (рис.7.2), на веденому валу співвісний з ведучим, – такий же ведений диск 2. Крутний
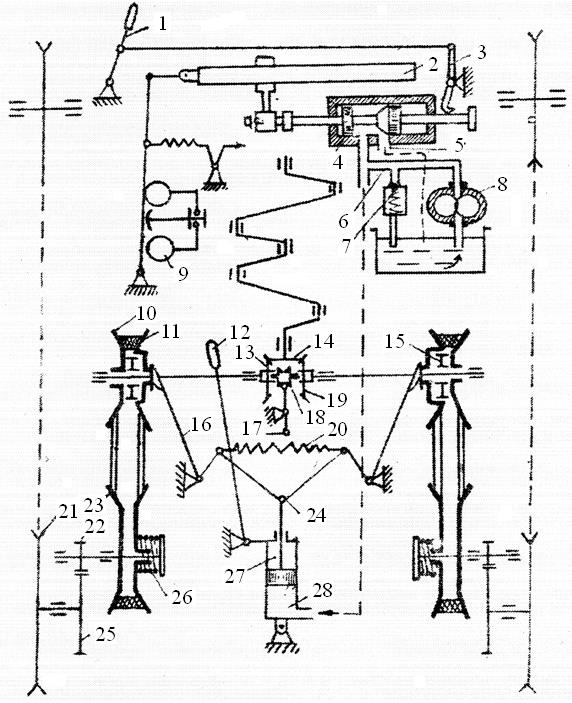
Рис. 7.1. Схема трактора з фрикційною автоматичною безступеневою трансмісією (УНДІМЄСГ):
1 – рукоятка зупинки трактора; 2 – рейка паливного насоса; 3 – кронштейн; 4 – золотник; 5 – дроселюючий отвір; 6 – жиклер; 7 – перепускний клапан; 8 – насос гідросистеми; 9 – важільці регулятора кількості обертів; 10 – нерухомий корпус ведучого шківа варіатора; 11 – рухомий корпус ведучого шківа варіатора; 12 – рукоятка повороту трактора; 13, 19 – ведені конічні шестерні; 14, 15, 18 – шестерні; 16, 17 – ричаг; 20 – пружина; 21 – ведуча зірочка; 22 – ведуча шестерня конічної передачі; 23 – ведений шків; 24 – шарнір; 25 – ведена шестерня конічної передачі; 26 – пружина; 27 –
гідроциліндр
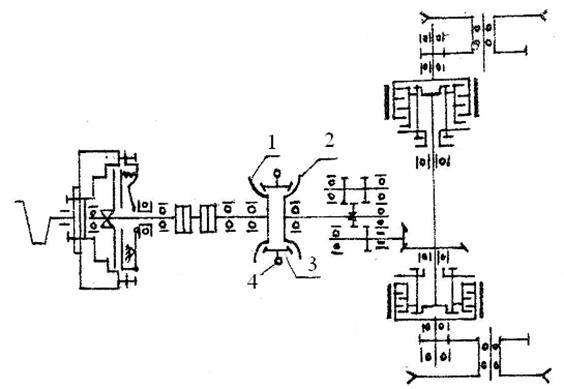
Рис. 7.2. Кінематична схема трансмісії трактора з фрикційною передачею:
1 – фасонний ведучий диск; 2 – фасонний ведений диск; 3 – ролик; 4 – вісь коливання ролика
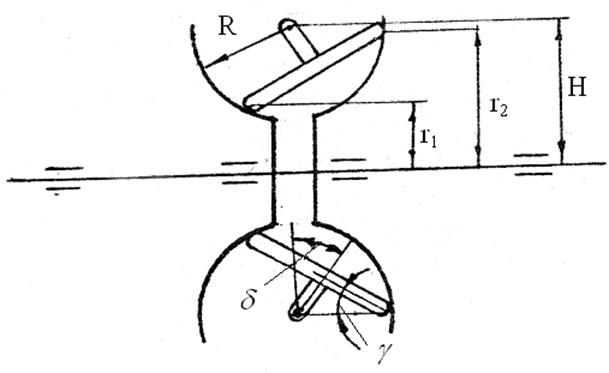
Рис. 7.3. Схема передачі В.А. Світозарова
момент від ведучого диска до веденого передається двома роликами 3. Передавальне число змінюється шляхом повороту роликів з осями навколо шарнірів 4, які є центром кругів, утворюючих поверхні дисків 1 і 2. Диски притискуються до роликів спеціальним обладнанням (на схемі не показано), яке розміщено на ведучому та веденому валах.
Передавальне число тороїдно-сферичної передачі (без урахування зміщення не ковзаючих точок) визначається за залежністю
 (7.17)
(7.17)
де r1, r2 – робочі радіуси чашок (рис. 7.3);
H – відстань від вісі чашок до вісі коливання роликів;
γ – кут між радіусами сфери і ролика у місці контакту;
δ – кут повороту роликів (при уповільненій передачі +δ, при прискореній, – -δ).
7.1.2. Електричні трансмісії
Обмотки збудження генераторів таких трансмісій (рис. 7.4, 7.5) – шун- това, незалежна і послідовна з відношенням ампер-витків 41,4: 66,1: 7,5%.
Обмотка незалежного збудження підключена до збудника Г-43. Вага регулюючої апаратури із збудником 5000 Н. Номінальне тягове зусилля Рг = 156 кН, максимальне Рг max = 240 кН, тяговий ККД ηтяг = 0,658.
Другий варіант такої трансмісії (трактор ДЄТ-250) має двохмашинну схему з одним генератором.
У електромеханічній трансмісії електричні машини мають три обмотки: послідовну; тахометричну, включену у ланцюг збудника, який приводиться від вихідного валу трансмісії; незалежну, включену у ланцюг збудника, який приводиться в дію первинним двигуном.
Для прикладу: питома вага трактора потужністю 320 кВт з механічною трансмісією gпит = 28,8 Н/кВт, з гідромеханічною – 38,9 Н/кВт, з електричною (243 кВт) – gпит = 17,7 Н/кВт, а з електромеханічною (280 кВт) – gпит = 100,5 Н/кВт.
7.1.3. Гідродинамічна трансмісія
Основне рівняння гідротрансформатора має вигляд
Мт = Мнас + Мр, (7.18)
де Мт – крутний момент турбінного колеса (рис. 7.6);
Мнас – крутний момент насосного колеса;
Мр – реактивний момент.
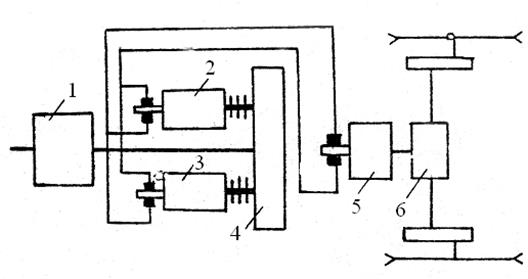
Рис. 7.4. Принципова схема електротрансмісії трактора:
1 – дизель В-748; 2,3 – генератори 103 кВт, 515 В; 4 – редуктор; 5 – тяговий електродвигун ДК-304-Т 153 кВт, 470 В, n = 2200 хв-1; 6 – головна передача з муфтами повороту
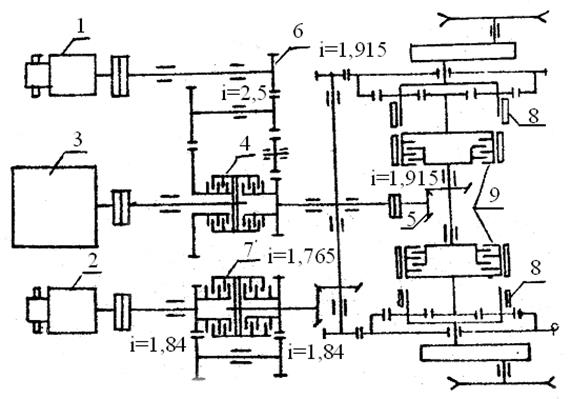
Рис. 7.5. Принципова кінематична схема електромеханічної
трансмісії трактора:
1,2 – електрична машина (генератор-двигун); 3 – дизель; 4,7 – подвійний фрикціон; 5 – головна передача; 6 – шестеренна передача; 8 – зупиночні гальма; 9 – гальма повороту
Коефіцієнт трансформації становить
 (7.19)
(7.19)
Передавальне число гідротрансформатора дорівнює
 , (7.20)
, (7.20)
де nт – частота обертання турбінного колеса;
nнас – частота обертання насосного колеса.
ККД гідротрансформатора визначається за залежністю
 . (7.21)
. (7.21)
Крутний момент, який передається гідротрансформатором визначається так
Мнас = λ1 · γ · n2нас · Д5; Мт = λ2 · γ · n2нас · Д5, (7.22)
де λ1 і λ2 – коефіцієнт первинного та вторинного моменту гідротрансформатора;
γ – питома вага робочої рідини;
Д – діаметр колеса.
Гідромуфта не збільшує крутного моменту, Мт = Мнас. Ковзання при початку руху машини (nт = 0) становить
 . (7.23)
. (7.23)
При номінальному крутному моменті ковзання S = 2…3%, а ККД гідромуфти ηгм = 1 – S = 0,97…0,98.
Максимальний ККД гідротрансформатора ηгт = 0,85…0,88. Коефіцієнт трансформації у прозорих гідротрансформаторів (рис. 7.7, 7.8) Кгт ≈ 1…2,4; у непрозорих – Кгт ≈ 1…4.
Дотична сила тяги визначається за формулою
 (7.24)
(7.24)
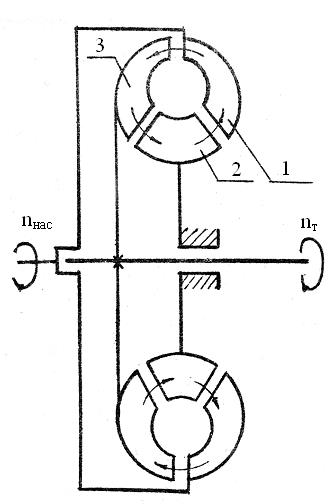
Рис. 7.6. Схема гідротрансформатора:
1 – насосне колесо; 2 – реакторне колесо; 3 – турбінне колесо
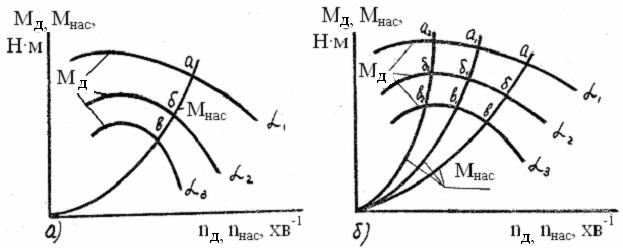
Рис. 7.7. Навантажувальна характеристика гідротрансформатора:
а – непрозорого; б – прозорого
Швидкість руху розраховується за формулою
 . (7.25)
. (7.25)
7.1.4. Гідростатична (гідрооб'ємна) трансмісія
Повний ККД такої трансмісії (рис.7.9) визначається за залежностями
ηгп = ηн · ηм · ηг; ηгп = ηн · ηм; ηн = ηмн · ηон · ηгн;
ηм = ηмм · ηом · ηгм, (7.26)
де ηмн і ηмм – механічний ККД насоса і гідромотора;
ηон і ηом – об’ємні ККД;
ηгн і ηгм – гідравлічні ККД насоса і гідромотора.
Передавальне число гідропередачі становить
 (7.27)
(7.27)
де qн і qм – робочі об'єми (питома продуктивність, питома витрата)
гідронасоса і гідромотора, см3/об.
Частота обертання вала гідромотора в хв-1 дорівнює
nм = nн · і гп · ηон · ηом, (7.28)
де nн – частота обертання вала насоса;
ηон = 0,94…0,96 – об'ємний ККД гідронасоса;
ηом = 0,94…0,98 – об'ємний ККД гідромотора.
Продуктивність насоса Qн і витрата гідромотора Qм в л/хв визна- чаються за залежностями
 (7.29)
(7.29)
Потужність насоса в Н·м/с становить
 а в кВт –
а в кВт –  (7.30)
(7.30)
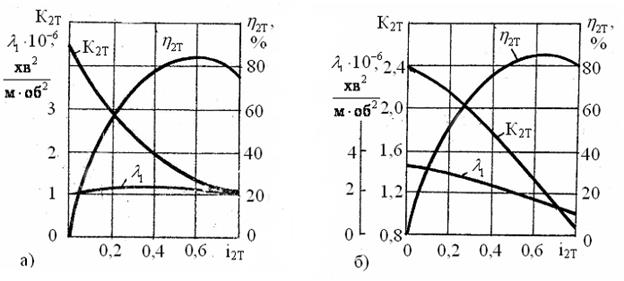
Рис.7.8. Безрозмірна характеристика гідротрансформатора:
а – непрозорого; б – прозорого
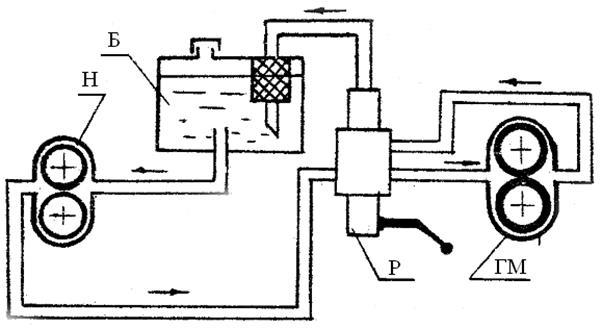
Рис. 7.9. Схема простішої гідростатичної передачі:
Н – насос; Б – бак; Р – розподільник; ГМ – гідромотор
Числові значення ρ в формулі (7.30) мають розмірність Н/см2, а Qн – л/хв.
Потужність гідромотора в кВт дорівнює
 (7.31)
(7.31)
де Р – сила тиску робочої рідини на виштовхувач насоса, Н;
ρ – робочий тиск, Н/м2, Н/см2;
ηн і ηм – повний ККД насоса і гідромотора.
Повний ККД гідропередачі для відомих машин η гп = 0,70…0,85 (гідравлічний ККД від гідравлічного опору у насосі, гідромоторі, трубопроводах та допоміжних гідроагрегатах). Механічний ККД насоса ηмн = 0,95…0,98, а гідромотора ηмм = 0,96…0,98; гідравлічний ККД насоса і гідромотора η гм = 0,96…0,99, якщо гідравлічний опір трубопроводу і допоміжних гідроагрегатів віднести до насоса та гідромотора порівну.
Крутний момент насоса і гідромотора в Н·м становлять
 ;
;  . (7.32)
. (7.32)
Для регулювання швидкості руху трактора при зміні тягового зусилля застосовують насоси змінної продуктивності з автоматичними регуляторами, що забезпечують постійну тягову потужність (рис. 7.10). У цьому випадку ρ · qн – соnst.
Діапазон регулювання гідропередачі визначається так
 . (7.33)
. (7.33)
Продуктивність аксіально-плунжерних насосів (рис. 7.12, 7.13) в см3/хв розраховується за залежністю
 (7.34)
(7.34)
де d – діаметр плунжера, см;
D – діаметр розміщення вісей циліндрів, см;
Zn – число плунжерів;
γ – кут нахилу шайби або блока циліндрів.
Робочий об'єм радіально-поршневої гідромашини (рис. 7.11) q, продуктивність насоса Qн і витрата гідромотора Qм в см3/хв відповідно становлять
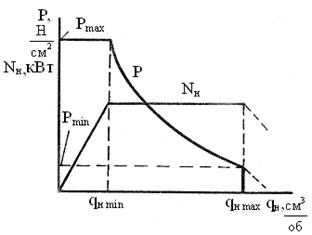 Рис. 7.10. Характеристика насоса змінної продуктивності
Рис. 7.10. Характеристика насоса змінної продуктивності
 Рис. 7.12. Схема аксіально-плунжерного насоса з нахиленою шайбою
Рис. 7.12. Схема аксіально-плунжерного насоса з нахиленою шайбою
| 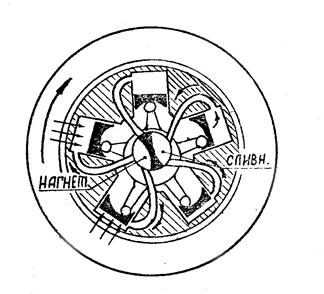 Рис. 7.11. Схема радіально-поршневого гідромотора, вбудованого у ведуче колесо
Рис. 7.11. Схема радіально-поршневого гідромотора, вбудованого у ведуче колесо
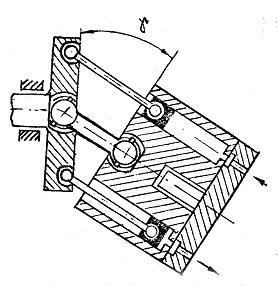 Рис. 7.13. Схема аксіально-плунжерного насоса з нахиленим блоком циліндрів
Рис. 7.13. Схема аксіально-плунжерного насоса з нахиленим блоком циліндрів
|
 (7.35)
(7.35)
Qн = qн · nн · ηон;  (7.36)
(7.36)
де d – діаметр циліндра, см;
S = 2е – хід поршня, см;
е – ексцентриситет, см;
Zn – число поршнів;
m – число робочих ходів поршня за один оберт (у багаторухових гідромашинах).
7.2. Методика тягового розрахунку трактора
з гідростатичною трансмісією
Вихідними даними для розрахунку є: тип трактора, тяговий клас (номінальне тягове зусилля Рг, Н), номінальна робоча швидкість Vн, км/г, ґрунтовий фон.
Експлуатаційна вага трактора в Н становить
 (7.37)
(7.37)
Розрахункова номінальна потужність двигуна в кВт дорівнює
 ,
,
де ηтягн = ηгл · ηб.доп · ηfn – оптимальний тяговий ККД трактора.
Номінальний крутний момент на ведучих колесах в Н·м визначається за залежністю
Мкн = (Ргн + f·G) · rк,
де rк – робочий радіус ведучих коліс, який визначається по типо- розміру шин, виходячи з допустимого навантаження, м.
Номінальний крутний момент гідромотора в Н·м становить
 (7.38)
(7.38)
де Zм – число гідромоторів.
Робочий об'єм гідромоторів в см3 дорівнює
 (7.39)
(7.39)
де ρ = 800…2500 Н/см2 – номінальний робочий тиск у гідроприводі.
Максимальний крутний момент гідромотора в Н·м визначається за формулою
 (7.40)
(7.40)
– обмежений по зчепленню рушіїв з ґрунтом і М'м max = КМмн – обмежений по двигуну (К – коефіцієнт пристосування двигуна по моменту) забезпечується збільшенням робочого тиску (Н/см2), відповідно, до
 або Р'max = ρ · К. (7.41)
або Р'max = ρ · К. (7.41)
Мінімальний крутний момент гідромотора в умовах самопересування трактора з максимальною швидкістю Vmax = 25…35 км/г в Н·м визначається за залежністю
 (7.42)
(7.42)
забезпечується мінімальним тиском
 (7.43)
(7.43)
числове значення якого повинно бути не менше Рmin = 300…400 Н/см2, що досягається відключенням при необхідності частини гідромоторів (Z'м – число включених гідромоторів).
Номінальна, максимальна і мінімальна витрати гідромоторів в л/хв відповідно становлять
 (7.44)
(7.44)
 (7.45)
(7.45)
 (7.46)
(7.46)
якщо мінімальна швидкість трактора Vmin = 3…4 км/г.
Мінімальна, номінальна і максимальна продуктивність гідронасоса в л/хв відповідно дорівнює
 (7.47)
(7.47)
 (7.48)
(7.48)
 (7.49)
(7.49)
|
|
Дата добавления: 2017-02-01; Просмотров: 86; Нарушение авторских прав?; Мы поможем в написании вашей работы!