КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Рівняння (3.44) можемо записати наступним чином 7 страница
Максимальний робочий об'єм (постійна) гідронасоса в см3 визначається за формулою
 (7.50)
(7.50)
Номінальна потужність двигуна в кВт становить
Nен = Nн + Nδн, (7.51)
де Nн – потужність, яка витрачається на привід насоса;
Nδн – потужність, що витрачається на буксування трактора при його роботі на номінальному режимі.
Числові значення Nн і Nδн визначаються так
 (7.52)
(7.52)
Одержані параметри гідромашини (qм і qнmax) застосовуються для розрахунку конструктивних розмірів насоса і гідромоторів, а по максимальній витраті Qмmax або продуктивності Qнmax – пропускна спроможність регулюючих органів, маслопроводів, арматури, фільтрів, об'єму баків.
Внутрішній діаметр маслопроводів від насоса в мм становить
 а до гідромоторів
а до гідромоторів  (7.53)
(7.53)
де Vж – розрахункова швидкість руху (4…5 м/с) робочої рідини у нагнітальних маслопроводах.
Теоретична тягова характеристика трактора розраховується і будується як потенціальна, але обмежується прийнятими швидкостями Vmin і Vmax та робочими тисками ρmin і ρmax.
Питання для самопідготовки та самоконтролю
1. Чому дорівнює коефіцієнт кінематичної невідповідності?
2. Як визначається паразитна потужність?
3. Передавальне число диференціала визначається за залежністю…
4. Зовнішній діаметр симетричного варіатора становить…
5. Чому дорівнює передавальне число тороїдально-сферичної передачі?
6. Як зменшується питома вага трактора з електричною трансмісією?
7. Чому дорівнює передавальне число гідротрансформатора?
8. Як визначається коефіцієнт корисної дії гідротрансформатора?
9. Чому дорівнює кількість обертів вала гідромотора?
10. Продуктивність аксіально-плунжерних насосів становить…
11. Як визначається експлуатаційна вага трактора з гідростатичною трансмісією?
12. Максимальний робочий об’єм гідронасоса визначається за залежністю…
8. Теорія повороту тракторів та автомобілів
8.1. Теорія повороту колісних тракторів та автомобілів
8.1.1. Загальні відомості
Транспортні роботи по об'єму складають приблизно 30% від усіх робіт в сільському господарстві. Час, протягом якого колісні трактори перевозять вантажі, складає 50% загального річного робочого часу, а автомобілі - більше 90%. При цьому машини рухаються не лише прямолінійно, а і по криволінійній траєкторії, кривизна якої постійно змінюється.
Траєкторією машини називається траєкторія її центра ваги на горизонтальній площині лінії шляху. Прямолінійний рух можливо розглядати як окремий випадок криволінійного, коли кривизна траєкторії дорівнює нулю
(радіус кривизни траєкторії дорівнює безмежності). Рух з кривизною траєкторії не рівній нулю прийнято називати поворотом.
Процес повороту складається із трьох етапів: вхід в поворот, коли кривизна траєкторії збільшується; рух з постійною кривизною; вихід із повороту, коли кривизна траєкторії зменшується до нуля.
Криволінійний рух вивчають головним чином для визначення таких експлуатаційних властивостей машин, як керованість і стійкість руху.
Під керованістю машини розуміють її здатність точно зберігати заданий напрямок руху (заданий курс), а при відповідній дії на органи керування - змінювати його по необхідній траєкторії. Властивість колісної машини здійснювати повороти з заданою кривизною траєкторії називається поворотливістю, а здатність точно зберігати заданий напрямок руху - курсовою стійкістю.
В якості критеріїв оцінки керованості і поворотливості колісних машин застосовуються такі показники:
- мінімальний радіус повороту при круговому русі;
- граничне значення швидкості зміни кривизни траєкторії різних характерних точок машини;
- кількість енергії, яка витрачається на керування машиною при рухові по заданій траєкторії;
- питома сила тяги, яка необхідна для здійснення повороту;
- коефіцієнт використання зчіпної ваги при повороті.
Чим менший радіус повороту, більша гранична швидкість зміни кривизни траєкторії характерних точок і менше енергії витрачається на керування, тим краща керованість і поворотливість колісної машини.
8.1.2. Способи повороту колісних машин
Поворот колісних тракторів та автомобілів здійснюється одним із наступних способів (рис. 8.1.):
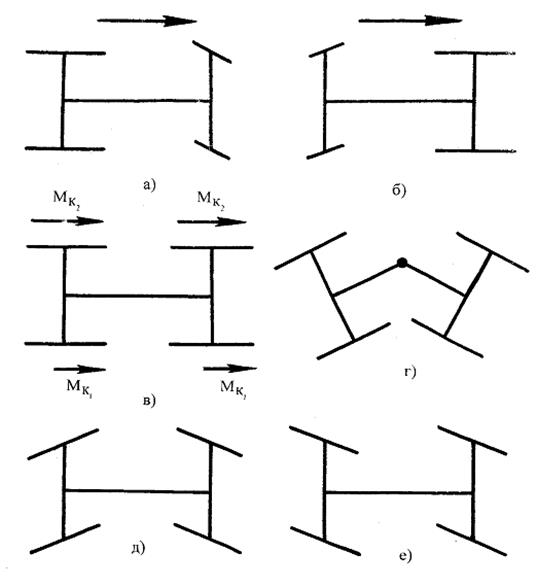
Рис. 8.1. Схеми повороту колісних машин
1. Зміною положення керованих коліс в горизонтальній площині відносно остова поворотом їх вісей.В автомобілів та універсально-просапних тракторів, звичайно, керованими колесами є передні (рис. 8.1,а), а в ком- байнах та самохідних шасі (СШ-75, м. Таганрог) - задні колеса (рис. 8.1,б);
2. Створення різниці крутних моментів (Мк2 > Мк1) на колесах одного борту по відношенню до коліс іншого борту в тих випадках, коли із-за великого діаметра коліс їх вісі можуть бути повернутими на обмежений кут, недостатній для отримання мінімального радіуса повороту (рис. 8.1,в). При цьому положення коліс відносно остова під час повороту не змінюється. Цей спосіб повороту застосовується на кар'єрних самоскидах надвеликої вантажепід'ємності (понад 100 т) і деяких моделях надпотужних тракторів (з силою тяги на гаку понад 10 кН);
3. Комбінування способів, вказаних вище у пунктах 1 та 2;
4. Зміною положення в горизонтальній площині однієї частини піврами
трактора відносно іншої (рис. 8.1,г). Такий спосіб повороту застосовується на Вітчизняних тракторах Т-150К та К-700 (К-700, К-701, К-710);
5. Поворотом передніх і задніх керованих коліс в різні боки (рис. 8.1,д). Такий спосіб повороту застосовується на Вітчизняному тракторі ЛТЗ-145 та тракторі моделі "Manitou-626"(Франція);
6. Поворотом передніх і задніх керованих коліс в один бік (рис. 8.1,е). В цьому випадку трактор не здійснює поворот, а рухається вбік. Тому цей спосіб зміни напрямку руху отримав назву "краб". Він застосовується на деяких моделях зарубіжних тракторів фірми "Case" і "Manitou-626".
В трактора фірми "Caterpillar" моделі 438С поворот здійснюється одним із способів: 1. Поворотом передніх коліс; 2. Поворотом передніх і задніх коліс в різні сторони; 3. "Крабом" (Neн = 66 кВт, m = 7560 кг).
8.1.3. Кінематика повороту колісної машини з рульовою трапецією
Кожний із приведених способів повороту має особливості кінематики. Для прикладу розглянемо кінематику повороту колісної машини з передніми керованими колесами і рульовою трапецією. При цьому приймаємо, що поворот здійснюється з постійним радіусом при сталому русі на горизонтальній ділянці, а шини не мають бокової еластичності. Схема колісної машини при такому повороті приведена на рис. 8.2.
На рис. 8.2 прийняті такі умовні позначення: L - продольна база, м; B - поперечна база, м; a - відстань між віссю машини і віссю шкворня поворотної цапфи,м; O1 - точка середини переднього моста (передньої осі); О2 - точка середини заднього моста; О - центр повороту (обертання); V1 і V2 - вектори швидкості відстаючого (внутрішнього) і забігаючого (зов- нішнього) коліс; V3 - вектор швидкості середини заднього моста; a1 і a2 - кути відхилення від нейтрального положення внутрішнього і зовнішнього коліс; wп - кутова швидкість обертання машини відносно центру повороту О, с-1; R - радіус повороту, м.
Положення центра повороту О визначається місцем перетину перпендикулярів, проведених до векторів швидкостей V1, V2 та V3. Лише в цьому випадку (коли перпендикуляри мають спільну точку перетину) колеса при повороті обертаються без бокового ковзання і бокових деформацій шин. Для забезпечення таких умов при повороті необхідно керовані колеса відхиляти від нейтрального положення на різні кути, величини яких визначаються із співвідношень
 (8.1)
(8.1)
Для спрощених випадків розглядають середній кут повороту керованих коліс, який становить
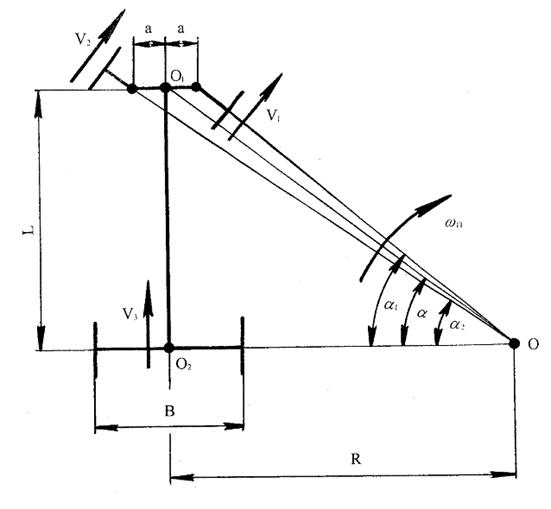
Рис. 8.2. Кінематика повороту колісної машини з двома передніми керованими колесами

Величина кута a визначається за залежністю
 . (8.2)
. (8.2)
Для колісної машини з передніми керованими колесами кути повороту зовнішнього і внутрішнього коліс повинні бути такими, щоб забезпечувалось наступне їх співвідношення
 (8.3)
(8.3)
Дане співвідношення кутів повороту керованих коліс на практиці забезпечується рульовою трапецією.
При прийнятих припущеннях, поворот колісної машини можливо розглядати як обертання її навколо центра повороту О з кутовою швидкістю, величина якої обчислюється за залежністю
 (8.4)
(8.4)
Для порівняльних розрахунків використовують відносний радіус повороту, який визначається із співвідношення
 . (8.5)
. (8.5)
Середній кут повороту керованих коліс α = 35…450.
8.1.4. Динаміка повороту колісних машин
В загальному випадку повороту колісної машини з двома передніми керованими колесами на неї діють такі сили (рис. 8.3):
1. Сила тяги на гаку Рг, яка прикладена під кутом g відносно центра обертання О на віддалі L¢ від вісі ведучих коліс; Рг tgg - бокова реакція сили тяги на гаку; Rг - рівнодіюча сили тяги на гаку Рг і її бокової реакції Рг tgg;
2. Сила Fп дії остова машини на передню вісь. Її необхідно прикладати до переднього моста для підтримання рівномірного руху. Сила Fп зрівноважується рівнодіючою Rfп сили опору перекочування передніх керованих коліс і її бокової реакції;
3. Сила опору перекочування передніх керованих коліс Pfп, яка діє перпендикулярно радіусу ОО1 повороту передньої осі; Lsina - плече сили Pfп відносно середини О2 ведучого моста; Pfn tga - бокова реакція сили Pfn , яка направлена перпендикулярно напрямку руху переднього моста (напрямок руху позначено пунктирною лінією) і запобігає боковому ковзанню шин коліс;
4. Сила опору повороту Zп , яка діє по радіусу ОО1 в напрямку від центра повороту О; Lcosa - плече сили Zп відносно середини ведучого моста.
Для здійснення повороту повинна виконуватись наступна умова
Рп = Рfп + Zп, (8.6)
де Рп - повертаюча сила: результуюча бокових реакцій шляху, яка діє на керовані колеса при встановленні їх під кутом до нейтрального положення, Н.
При визначенні повертаючої сили необхідно розглянути умову рівноваги передньої вісі машини при постійній швидкості повороту V = const.
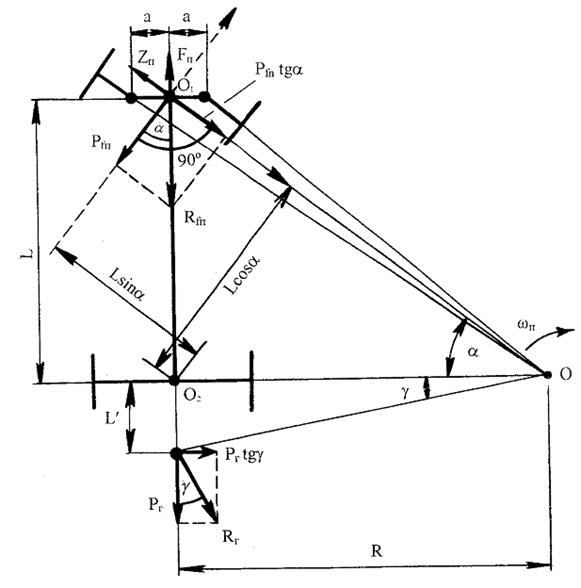
Рис. 8.3. Схема сил, які діють на колісну машину при повороті
Рівняння моментів у цьому випадку має вигляд
Mс = M1 + M2 + M3, (8.7)
де Мс - сумарний момент опору повороту, Н·м;
М1 - момент, який діє на задні колеса при повороті, Н·м;
М2 - момент опору повороту від дії сили Рfп, Н·м;
М3 - момент опору повороту від дії сили Рг, Н·м.
Момент, який діє на задні колеса при повороті, визначається за формулою проф. Є.Д. Львова
 (8.8)
(8.8)
де Рк -дотична сила тяги на окружності ведучого колеса, Н. Числове
значення Рк визначається за залежностями (2.23, 2.25);
d - величина буксування ведучих коліс. Числове значення d
визначається за залежностями (2.44…2.47, 2.51);
b - ширина шини, м;
В - поперечна база машини, м;
R - радіус повороту, м.
Числові значення b, В та R у формулу (8.8) приймається із паспортних даних машини.
Момент опору повороту від дії сили опору перекочування ведучих коліс становить
M2 = Pfп·L·sina. (8.9)
Момент опору повороту від дії сили тяги на гаку визначається за залежністю
M3 = Pг ·tgg ·L¢. (8.10)
При сталому русі умовою можливості повороту є рівність
Мс = Мп,
де Мп - повертаючий момент, Н·м.
Повертаючий момент визначається за залежністю
Мп =(Pfп tga + Zп ) ·L·cosa. (8.11)
Із рівняння (8.11) видно, що повертаюча сила Рn = Р f ntgα + Zn складається із поперечної складової Р f ntgα сили опору кочення передніх коліс та сили Zn, яка приведена до напрямку дії сили Р f ntgα
 (8.12)
(8.12)
8.1.5. Керованість колісної машини
Для того, щоб керовані колеса перекочувались без бокового ковзання необхідно, щоб сила зчеплення коліс з дорогою в поперечному напрямку була більшою, ніж повертаюча сила.
Аналітично ця умова записується у вигляді такої залежності
Pj = jG > Pп, (8.13)
де Рj - сила зчеплення коліс з дорогою в поперечному напрямку, Н;
j - коефіцієнт зчеплення коліс з дорогою в поперечному напрямку;
G - навантаження, яке приходиться на керовані колеса, Н.
8.1.6. Вплив бокового уводу шин на кінематику повороту
колісної машини
Увод шин виникає під дією бокової складової відцентрових сил або інших сил (бокового вітру, нахилу автомобіля відносно лінії горизонту та ін.). В результаті уводу шин при рухові передньої і задньої вісей їх траєкторії змінюються у порівнянні з тим випадком, коли уводу нема. Схема шини колісної машини і сили, які на неї діють при повороті, приведена на рис. 8.4.
На рис. 8.4 позначено: Zк - бокова сила, яка діє на шину при повороті; А - центр п’ятна контакту шини з поверхнею дороги; Vм - вектор швидкості машини; Vш - вектор швидкості шини; g - кут бокового уводу шини.
Боковий увод шини характеризується коефіцієнтом увода, який визначається за залежністю
Кув =  (8.14)
(8.14)
Допустиме значення кута бокового увода шини автомобіля
gдоп = 3…50, а граничне - gгр = 6…80.
Величина коефіцієнта увода в Н/град залежить від типу шини, числа шарів корда, конструкції корда (діагональний або радіальний), тиску в камерах шин, і знаходиться в межах: для вантажних автомобілів – 400…750; для легкових автомобілів – ≥ 1000; для тракторів: передні колеса – 250…500; задні колеса – понад 1000.
НАМІ була запропонована емпірична формула для визначення коефіцієнта увода шин
 Н/град,
Н/град,
де В і d – ширина і діаметр ободу шини, м;
Р ш – внутрішній тиск повітря у шині, Н/см2.
При уводі
 м, (8.15)
м, (8.15)
де γ1 і γ2 – кути уводу шин передніх і задніх коліс.
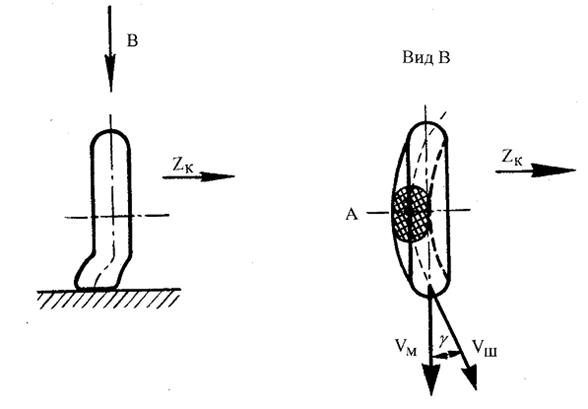
Рис. 8.4. Схема шини колісної машини при повороті
При γ1 > γ2 – R´ > R, автомобіль володіє недостатнім повертанням (рис. 8.5).
При γ1 < γ2 – R´ < R, автомобіль володіє надлишковим повертанням.
При γ1= γ2 – R´= R, автомобіль має нейтральне повертання (нормальне).
При недостатньому повертанні (γ1>γ2) поперечна складова відцентрової сили Рц направлена протилежно боковій силі Zк, яка спричиняє увод та зменшує його.
При надлишковому повертанні (γ1<γ2) поперечна складова відцентрової сили направлена у бік дії збурюючої бокової сили і збільшує увод.
При нейтральному повертанні (γ1=γ2) R´=R, центр повороту зміщується і траєкторія машини змінюється.
Вантажні автомобілі завжди мають недостатнє повертання, так як задні колеса завжди мають по дві шини.
У легкових автомобілів для одержання недостатнього повертання центр ваги зміщають дещо ближче до передньої вісі з метою збільшення дії на неї відцентрової сили, а тиск у передніх шинах дещо знижують.
Оптимальні значення γ1 – γ2 = 2…30 при боковій силі Z = (0,3…0,4)G.
8.1.7. Стабілізація керованих коліс
Стабілізація керованих коліс, що значить, здатність їх до збереження нейтрального положення при прямолінійному русі і повертанню у нейтраль-
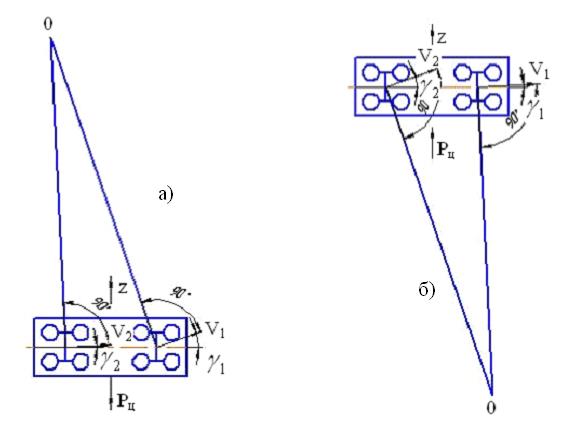
Рис. 8.5. Рух автомобіля з надлишковим та недостатнім
повертанням коліс
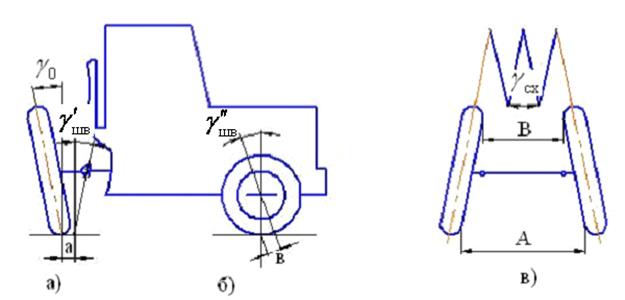
Рис. 8.6. Кути установки керованих коліс
не положення після повороту досягається встановленням керованих коліс із наступними кутами (рис. 8.6):
Розвал коліс γо – боковий нахил площини колеса до вертикальної площини. Для сучасних автомобілів γо = 0,5…1,00, тракторів – γо ≤ 0…40;
Кут  поперечного нахилу шворня. = 4…80;
поперечного нахилу шворня. = 4…80;
Кут  поздовжнього нахилу шворня. = 0…30;
поздовжнього нахилу шворня. = 0…30;
У легкових автомобілів інколи = 0,5…10;
Кут γсх сходження коліс звичайно характеризується сходженням А – В, де А і В – відстань між внутрішніми поверхнями шин у горизонтальній площині на рівні вісей ззаду і спереду. У автомобілів сходження А – В = 1…5 мм, у тракторів А – В = 0…12 мм.
Коливання керованих коліс виникає внаслідок незадовільної неузгодженності кінематики переміщення рульових тяг, ресор, дисбалансу коліс, періодично перемінних нерівностей та інших випадків. Усунення цих випадків сприяє стабілізація керованих коліс і запобігає їх коливанню.
|
|
Дата добавления: 2017-02-01; Просмотров: 97; Нарушение авторских прав?; Мы поможем в написании вашей работы!