КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Елементарне нормальне навантаження dG, яке передається кожною із цих елементарних ділянок на опорну поверхню, становить 1 страница
|
|
|
|
Динаміка гусеничного рушія
В рівняння (8.20) підставимо значення R (рівняння (8.19)). Після виконання відповідних арифметичних дій рівняння (8.20) запишемо у такому вигляді
ρ =  =
=  . (8.21)
. (8.21)
При обертанні гусениць навколо полюсів О1 і О2 між гусеницями і дорогою виникають сили опору повороту, які обумовлені силами тертя і іншими боковими реакціями, що перешкоджають повороту (на рис.8.7 ці сили позначені стрілочками).
Для визначення момента опору повороту Мп необхідно на опорній поверхні гусениць виділити елементарні ділянки безкінечно малої довжини dx (рис. 8.7,б), розташовані на віддалі х від середини опорної поверхні (лінії О2-О1).
dG =  . (8.22)
. (8.22)
Вважаючи, що вага трактора розділяється на обидві гусениці рівномірно, елементарну силу, з якою кожна із виділених ділянок гусениці опирається повороту, визначаємо як µdG, де µ – приведений коефіцієнт опору повороту, який враховує всі бокові реакції дороги, які діють на гусениці при повороті.
Величина µ приймається однаковою по всій довжині опорної поверхні гусениці і визначається за емпіричною формулою проф. А.О.Нікітіна
µ =  , (8.23)
, (8.23)
де µmax – найбільше значення коефіцієнта опору повороту в даних грунтових умовах при R = 0,5B. Величина µmax залежить від механічних властивостей грунту, конструкції гусениць і глибини їх занурення в грунт. Максимальне значення µmax для твердих доріг становить 0,7, а для рихлих польових доріг – 1,0;
а – постійний коефіцієнт. Величина а знаходиться в межах 0,75…0,90;
ρ – відносний радіус повороту, м.
Кожна елементарна сила утворює елементарний момент опору повороту з плечем х величина якого становить
 .
.
Cумарний момент опору повороту дорівнює
|
|
|
 . (8.24)
. (8.24)
Із рівняння (8.24) видно, що сумарний момент опору повороту гусе-ничного трактора тим більший, чим важчий трактор, чим довша опорна поверхня гусениці і чим більше значення приведеного коефіцієнта опору повороту.
8.2.3. Поворот гусеничного трактора з навантаженням на гаку
Для визначення основних параметрів динаміки повороту приймаємо: трактор рухається стало (j=0); радіус повороту постійний; ділянка шляху горизонтальна (α=0); буксування гусениць відсутнє; опір перекочуванню обох гусениць однаковий.
Cхема сил, які діють на трактор в даних умовах, приведена на рис. 8.8.
Поворот трактора здійснюється за рахунок різниці дотичної сили тяги на гусеницях (РК2 > РК1). Під дією сили тяги на гаку полюса обертання гусениць і корпуса О1, О2 і О3 зміщаються на величину ХП назад (точки О'1, О'2 і О'3 відповідно). Величина зміщення полюсів обертання визначається за залежністю
ХП  , (8.25)
, (8.25)
де РГ – сила тяги на гаку, Н;
l – відстань від середини опорної поверхні гусениць до точки прик- ладання сили тяги на гаку, м;
µ – приведений коефіцієнт опору повороту;
qcp – середній питомий тиск гусениць на грунт, Н/м2;
b – ширина гусениці, м.
Середній питомий тиск гусениць на грунт дорівнює
qcp =  . (8.26)
. (8.26)
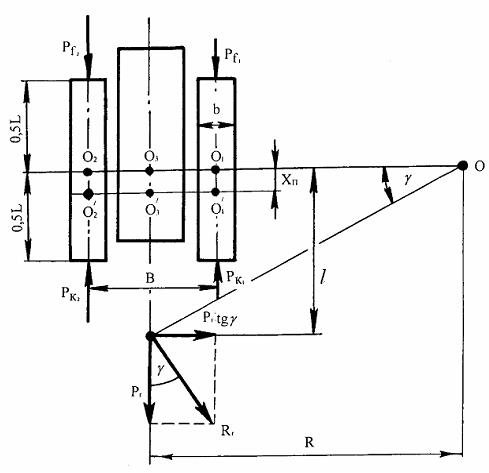
Рис. 8.8. Схема сил, які діють на гусеничний трактор при повороті
з навантаженням на гаку
Із-за зміщення полюсів обертання дещо змінюється сумарний момент опору повороту (формула 8.23). Ця зміна враховується поправочним коефіцієнтом k. Тому величина сумарного момента повороту становить
МП = 
 . (8.27)
. (8.27)
Точно визначити величину коефіцієнта дуже важко. В звичайних умовах повороту трактора з навантаженням на гаку величина менша одиниці і відрізняється від неї на незначну величину. Тому при приблизних, в тому числі і навчальних, розрахунках можливо приймати k = 1. В граничному випадку, при хд/L=1/6 та хп/L=0,207 =0,78 (хд – величина зміщення центра тиску гусеничного трактора відносно середини опорної поверхні гусениці).
|
|
|
Результуючий момент опору повороту дорівнює сумі двох моментів: сумарного момента опору повороту та момента, який утворюється від дії бокової реакції сили тяги на гаку. Величина момента дорівнює
МРЕЗ = МП + МПРг =  + РГ tgg (l – xп). (8.28)
+ РГ tgg (l – xп). (8.28)
Для подолання момента опору повороту (формула 8.28) потрібен відповідний повертаючий момент. Він створюється шляхом підведення до забігаючої і відстаючої гусениць сил тяги різної величини. Величина повертаючого момента визначається із умови рівноваги трактора відносно полюсів обертання гусениць О1 і О2, яку записують так
РК2В = Рf2B + MП + 0,5ВРГ + МПРг; (8.29)
РК1В = Рf1В – МП + 0,5ВРГ – МПРг, (8.30)
де Рf1 і Pf2 – сили опору перекочування відстаючої і забігаючої гусениць відповідно, Н.
Віднімаючи почленно від рівняння (8.29) рівняння (8.30), з урахуванням рівняння (8.28), отримаємо
В(РК2 – РК1) + В(Рf2 – Pf1) = 2МРЕЗ. (8.31)
Враховуючи те, що Рf2 = Рf1, рівняння (8.31) записуємо так
МПОВ = МРЕЗ = 0,5В(РК2 – РК1 ). (8.32)
Для трактора з простим диференціальним механізмом повороту
 (8.33)
(8.33)
де Мг – гальмівний момент;
rк – робочий радіус зірочки.
Повертаючий момент по двигуну становить
 , (8.34)
, (8.34)
де Мкн – ведучий момент при номінальній потужності;
Мк – ведучий момент при прямолінійному русі.
Мінімальний радіус повороту при цьому Rmin= 0,5В.
Для трактора з подвійним диференціальним механізмом повороту (рис.8.9)
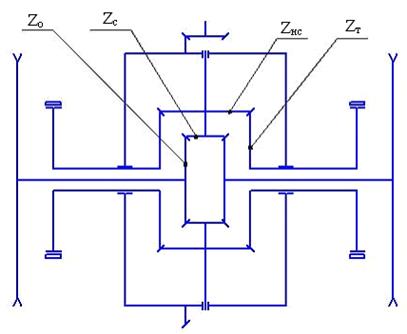
Рис. 8.9. Схема механізма повороту з подвійним диференціалом
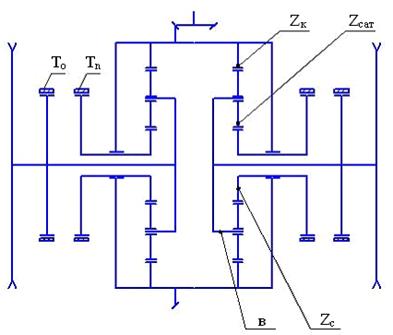
Рис. 8.10. Схема одинарного планетарного механізма повороту
 , (8.35)
, (8.35)
де і диф = 2,5…3 – передавальне число подвійного диференціала, яке дорівнює
де Zзс, Zт, Zо, Zвс – число зубців, відповідно, зовнішніх сателітів, гальмівних шестерень, піввісьових шестерень, і внутрішніх сателітів.
Повертаючий момент по двигуну дорівнює
 . (8.36)
. (8.36)
Мінімальний радіус повороту Rmin= 0,5В· і диф.
У трактора з фрикційним механізмом повороту середня швидкість при повороті становить
Повертаючий момент при виключеному фрикціоні дорівнює
 , (8.37)
, (8.37)
а при виключеному фрикціоні з гальмуванням відстаючої гусениці
|
|
|
 . (8.38)
. (8.38)
Повертаючий момент по двигуну визначається за залежністю
 . (8.39)
. (8.39)
Мінімальний радіус повороту Rmin= 0,5В.
З одинарним планетарним механізмом повороту (рис. 8.10) кінематика та динаміка повороту аналогічна фрикційному механізму повороту.
При прямолінійному русі піввісьові гальма То відпущені, а гальма Тn планетарного механізму затягнуті. Передавальне число ПМП становить
 , (8.40)
, (8.40)
де Zк і Zс – число зубів коронної і сонячної шестерень.
Для повороту звільняють гальма Тn планетарного механізму, для крутого повороту, крім цього, затягують піввісьове гальмо То.
Характеристика повороту, це залежність моментів Мn, МnN та Мnj від радіуса R або відносного радіуса  (рис 8.11).
(рис 8.11).
8.2.4. Характеристика повороту гусеничного трактора
Оцінка можливостей повороту гусеничного трактора проводиться по повертаючому моменту по двигуну МПN і по повертаючому моменту по зчепленню забігаючої гусениці з дорогою МПj.
Повертаючий момент по двигуну для тракторів з різними механізмами повороту визначається за залежностями (8.34), (8.36),(8.39).
Максимальна дотична сила тяги на забігаючій гусениці по зчепленню з грунтом повинна бути
РК2  0,5jG,
0,5jG,
де j – коефіцієнт зчеплення забігаючої гусениці з грунтом;
G – повна вага трактора, Н.
Повертаючий момент по зчепленню забігаючої гусениці з дорогою визначається за залежністю
МПj = 0,5В(jG – РКн). (8.41)
Видно, що величина повертаючого момента по двигуну залежить від номера передачі і умов руху при повороті. Величина повертаючого момента по зчепленню забігаючої гусениці з дорогою не залежить від типу механізма поворота.
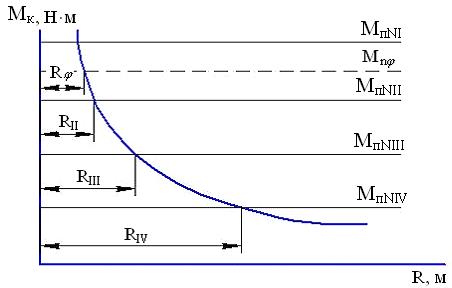
Рис. 8.11. Характеристика повороту гусеничного трактора
Питання для самопідготовки та самоконтролю
1. Перелічити і дати характеристику основних способів повороту колісних машин.
2. Особливості кінематики повороту: трактора з одним колесом; автомобіля при наявності рульової трапеції.
3. Яку умову зберігання керованості колісної машини Ви знаєте та як вона обчислюється?
4. Що таке боковий увод шин і як він впливає на поворотливість машин?
|
|
|
5. Які кути стабілізації керованих коліс Ви знаєте і яке їх призначення?
6. Характеристика автотранспортного потягу.
7. Як виконується поворот гусеничного трактора та які механізми повороту Ви знаєте?
8. Знайдіть аналітичні рівняння для визначення моменту опору повороту, результуючого моменту опору повороту гусеничного трактора.
9. Що таке поворотний момент гусеничного трактора, які фактори на нього впливають та як його визначити при сталому повороті?
10.Як визначити дотичні сили тяги гусениць на повороті?
11.Який вплив на динаміку повороту мають механізми повороту: диференціальний, з муфтами повороту, планетарний?
12.Побудуйте характеристику повороту гусеничного трактора та дайте аналіз можливості повороту з різними радіусами.
9. Стійкість тракторів та автомобілів
9.1. Повздовжня стійкість тракторів та автомобілів
без навантаження на гаку
Стійкість тракторів та автомобілів характеризується їх можливістю працювати на схилах без перекидання.
Повздовжня стійкість колісних тракторів та автомобілів залежить від величини реакцій грунту (шляху) на направляючі і ведучі колеса. Величини реакцій під час експлуатації машини не залишаються постійними і залежать від типу агрегатуємої з трактором машини, зміни опору грунту на робочі органи машини, рельєфу поля або від виду і способу розташування вантажу на платформі (в кузові) автомобіля, стану шляху, а також від кваліфікації тракториста або водія.
Найбільший кут, на якому машина може стояти нерухомо без перекидання, називається граничним статичним кутом під’йому  (рис. 9.1,а) або кутом схилу
(рис. 9.1,а) або кутом схилу  (рис. 9.1,б).
(рис. 9.1,б).
При граничних статичних кутах і вектор ваги машини G проходить через точку дотику шини з грунтом.
Перекидання машини буває тоді, коли колеса одного моста повністю розвантажуються і діюча на них нормальна реакція грунту дорівнює нулю. В цьому випадку вектор ваги машини проходить за точкою дотику шини з грунтом.
Граничний статичний кут на перекидання визначається із рівняння моментів сил, які діють на машину відносно можливої точки перекидання.
На під’йомі рівняння моментів складається відносно точки Ок і має наступний вигляд

 Gcos a – Gsin h = 0,
Gcos a – Gsin h = 0,
де Gcos a – стабілізуючий момент, Н × м;
Gsin h – перекидаючий момент, Н × м.
Після математичних перетворень маємо
 . Звідки = arctg
. Звідки = arctg  . (9.1)
. (9.1)
На схилі рівняння моментів складається відносно точки Оп і має наступний вигляд
Gcos  (L – a) – Gsin h = 0.
(L – a) – Gsin h = 0.
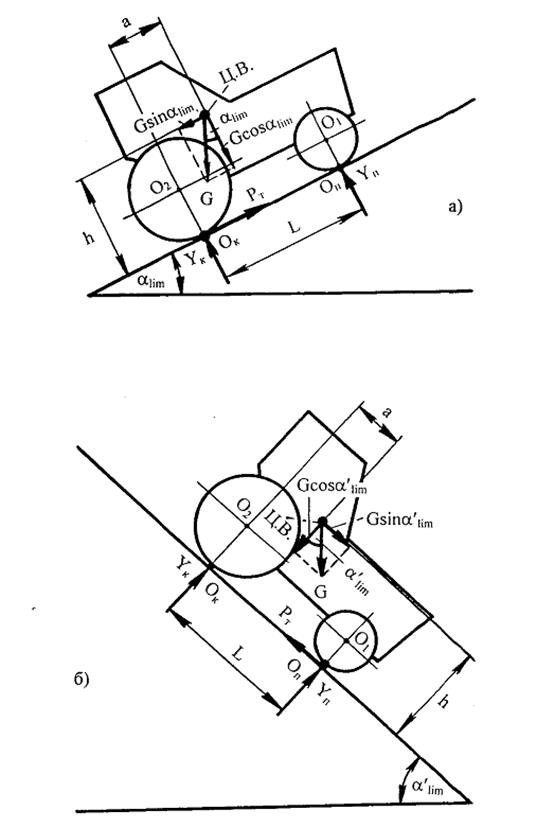
Рис. 9.1. Схема сил, які діють на колісну машину на під’йомі (а) і
схилі (б) при її перекиданні
Після математичних перетворень маємо
 . Звідки = arctg
. Звідки = arctg  . (9.2)
. (9.2)
Із рівнянь (9.1, 9.2) видно, що гранична статична стійкість колісної машини визначається координатами її центра ваги.
Сучасні колісні машини мають такі значення граничних статичних кутів:
-  колісні трактори універсального типу; = 35°…40°;
колісні трактори універсального типу; = 35°…40°;
- вантажні автомобілі при с = 2 і рівномірному ³ 60°
|
–  легкові автомобілі;
легкові автомобілі;
- вантажні автомобілі при с = 1;
-
|

без навісних машин
9.2. Граничний статичний кут по сповзанню
Повздовжня стійкість колісних машин при стоянці на під’йомах і схилах може бути порушена не лише в результаті її перекидання, а і в результаті її сповзання, коли максимальна гальмівна сила Рт.мах, яка може бути створена в даних умовах, недостатня для утримування машини на нахиленій поверхні.
Схема сил, які діють на колісну машину в цьому випадку, приведена на рис. 9.2.
Граничний статичний кут по сповзанню визначається із умови неможливості сповзання.
Для прикладу розглянемо два випадки:
а) гальма встановлені лише на задніх колесах:
На під’йомі рівняння умови неможливості сповзання має вигляд
Gsinaj = Рт.мах = jYк, (9.3)
де j – коефіцієнт зчеплення коліс з дорогою.
Для визначення величини нормальних реакцій грунту на ведучі колеса Yк складаємо рівняння моментів сил, які діють на колісну машину, відносно точки Оп
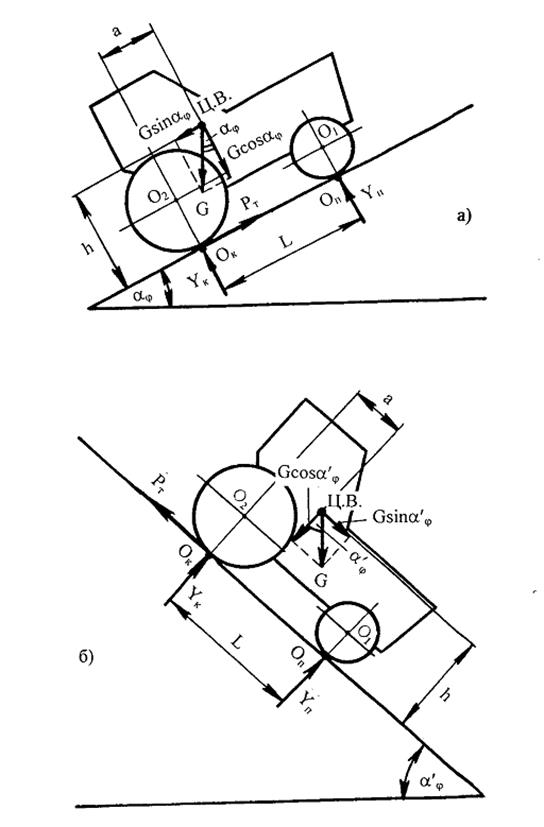
Рис. 9.2. Схема сил, які діють на колісну машину на під’йомі (а) і
схилі (б) при її сповзанні
YкL – Gcosaj(L – a) – Gsinajh = 0.
Після математичних перетворень отримуємо
 .
.
Підставляємо отримане значення Yк у рівняння (9.3) і маємо
 .
.
Після математичних перетворень отримуємо
 . (9.4)
. (9.4)
На схилі рівняння умови неможливості сповзання має вигляд
Gsina¢j = Pт.мax = jYк. (9.5)
Рівняння моментів сил, які діють на колісну машину, відносно точки Оп записуємо так
YкL – Gcosa¢j(L – a) + Gsina¢jh = 0.
Після математичних перетворень отримуємо
 .
.
Підставляємо отримане значення Yк у рівняння (9.5) і отримуємо
 .
.
Після математичних перетворень маємо
 . (9.6)
. (9.6)
Із рівнянь (9.4) і (9.6) видно, що граничний кут схилу по сповзанню a¢j значно менший граничного кута під’йому aj.
На схилі з кутом a¢lim гальмування машини практично відсутнє, так як Yк = 0 і Pт.мax = 0, тобто задні колеса повністю розвантажуються.
Тому для колісних машин у яких гальмуються лише задні колеса визначення граничного статичного кута схилу по перекиданню tga¢lim (формула 9.2) не має практичного смислу. В цьому випадку стійкість необхідно перевіряти по граничному статичному куту по сповзанню (формула 9.6);
б) гальма встановлені на всіх колесах:
На під’йомі рівняння умови неможливості сповзання має вигляд
Pт.мax = jGcosaj, а на схилі – Pт.мax = jGcosa¢j. (9.7)
Враховуючи те, що Pт.мax = jGsinaj (формула 9.3), або Pт.мax = jGsina¢j (формула 9.5) можемо записати:
– для підйома Gsinaj = jGcosaj; – для схилу Gsina¢j = jGcosa¢j. (9.8)
Після математичних перетворень отримуємо
tgaj = tga¢j = j. (9.9)
9.3. Загальна умова повздовжньої стійкості колісних машин
Гарантією неможливості перекидання колісної машини є її неможливість проїхати на ділянку дороги з гранично допустимим під’йомом. Аналітично цю умову записують так
Pк.мax < Gsinalim, (9.10)
де Pк.мax – максимальна дотична сила тяги на окружності ведучого
колеса, Н.
Враховуючи те, що для сучасних тракторів Pк.мax = jGcosalim, після математичних перетворень рівняння (9.10) записуємо
j < tgalim. (9.11)
9.4. Повздовжня стійкість колісної машини з навантаженням на гаку
При наявності навантаження на гаку нормальні реакції грунту на колеса машини змінюються.
При рухові на під’йом величина нормальної статичної реакції на передні колеса Yп.стат змінюється до величини нормальної динамічної реакції Yп. Ці зміни характеризує коефіцієнт запасу повздовжньої стійкості
 . (9.12)
. (9.12)
Допустиме значення коефіцієнта запасу повздовжньої стійкості знаходиться в межах kдоп = 0,4…0,6.
Величина нормальної динамічної реакції на передні колеса може знаходитись в межах Yп = (0,15…0,20)G.
При більших значеннях Yп наступає втрата керованості.
9.5. Гранична статична стійкість гусеничного трактора
Для прикладу розглянемо гусеничні трактори з двома типами підвіски:
а) трактор з напівжорсткою підвіскою:
Критерієм повздовжньої стійкості гусеничного трактора з такою підвіскою є положення центра тиску гусениць (точка Д).
Для визначення alim напишемо рівняння моментів сил, які діють на трактор, відносно точки Д (рис.9.3):
- на під’йомі Gcosalim(0,5L + a0) – Gsinalimh = 0.
Після математичних перетворень отримуємо
tgalim=  . (9.13)
. (9.13)
- на схилі Gcosa¢lim(0,5L – a0) – Gsina¢limh = 0.
Після математичних перетворень отримуємо
tga¢lim =  . (9.14)
. (9.14)
Числові значення граничних кутів знаходяться в межах alim = a¢lim =
= 35°…45°;
б) трактор з балансирною підвіскою:
Критерієм повздовжньої стійкості гусеничного трактора з такою підвіскою є положення вісей качання балансирних кареток (точки ОI та ОII на рис.9.4).
Для визначення alim (a¢lim) напишемо рівняння моментів сил, які діють на трактор, відносно точки ОII (ОI):
– на під’йомі Gcosalim(0,5Lк + a0) – Gsinalimh = 0,
де Lк – відстань між осями качання кареток, м.
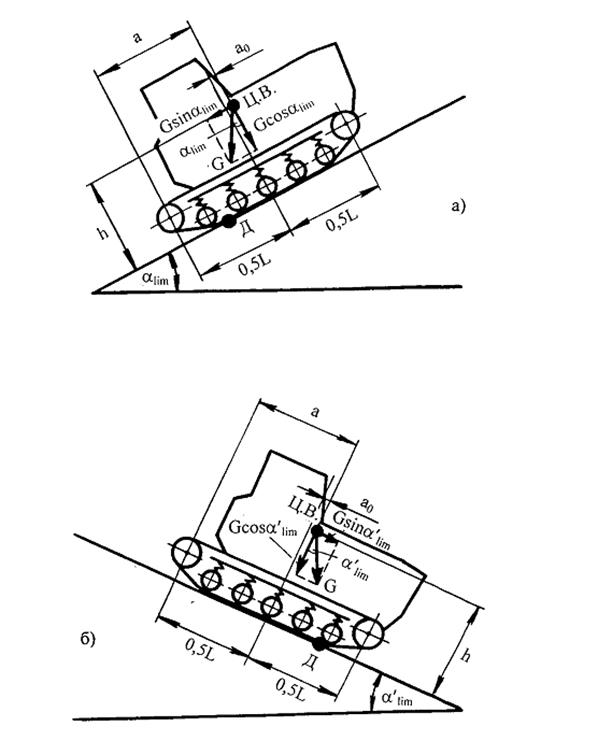
Рис. 9.3. Схема сил, які діють на гусеничний трактор з напівжорсткою
підвіскою на під’йомі (а) і на схилі (б)
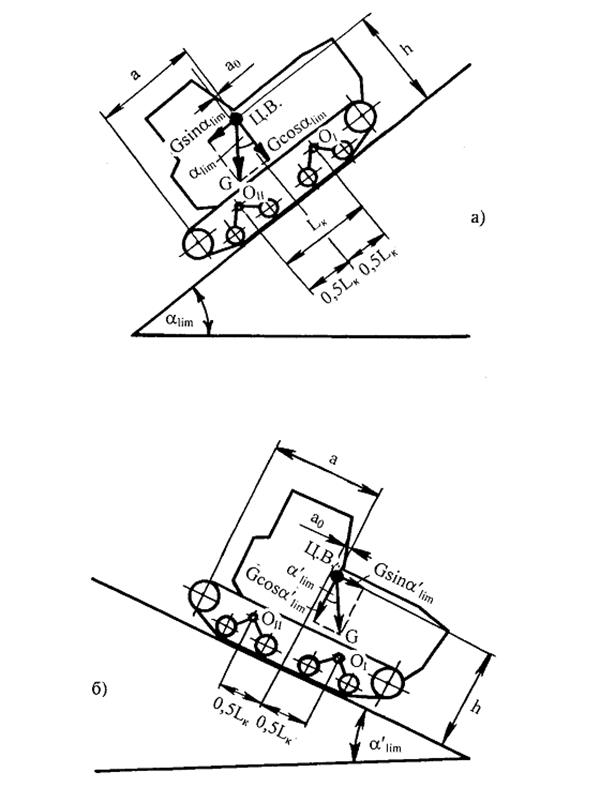
Рис. 9.4. Схема сил, які діють на гусеничний трактор з балансирною
підвіскою на під’йомі (а) і на схилі (б)
Після математичних перетворень отримуємо
tgalim =  . (9.15)
. (9.15)
- на схилі Gcosa¢lim(0,5Lк – a0) – Gsina¢limh = 0.
Після математичних перетворень отримуємо
tga¢lim =  . (9.16)
. (9.16)
Числові значення граничних кутів знаходяться у межах alim=35°; a¢lim=28°…30°.
9.6. Поперечна стійкість тракторів та автомобілів
В поперечному напрямку граничний статичний кут перекидання визначається величиною кута blim та b¢lim.
Для прикладу розглянемо випадок, коли колісна машина знаходиться на під’йомі. Схема сил, які діють у цьому випадку на колісну машину, приведена на рис.9.5.
Для визначення величини кута blim складаємо рівняння моментів сил, які діють на колісну машину, відносно можливої точки перекидання О2. Рівняння моментів має такий вигляд
Gsinblimh – 0,5BGcosblim = 0.
Після математичних перетворень отримуємо
tgblim =  . (9.17)
. (9.17)
Можливою точкою перекидання гусеничної машини є також точка О2, але вона, на відміну від колісної машини, знаходиться не посередині гусениці, а на її краю. Рівняння моментів у цьому випадку записуємо так
Gsinblimh – 0,5(B + b)Gcosblim = 0.
Після математичних перетворень отримуємо
tgblim =  . (9.18)
. (9.18)
|
|
|
|
|
Дата добавления: 2017-02-01; Просмотров: 70; Нарушение авторских прав?; Мы поможем в написании вашей работы!