КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Елементарне нормальне навантаження dG, яке передається кожною із цих елементарних ділянок на опорну поверхню, становить 3 страница
|
|
|
|
19. Як визначити коефіцієнт опору машини з колісною формулою 4х4?
20. Що таке фактичний дорожний просвіт, чим він відрізняється від конструктивного?
21. Чим оцінюється прохідність просапних тракторів у міжряддях?
22. Які Вам відомі способи зменшення шкідливої дії ходових систем на родючість ґрунту та урожай сільськогосподарських культур?
10. Плавність руху і енергономічність машин
10.1. Загальні відомості
Плавністю ходу машини називається пристосованість її до поглинання різних поштовхів, ударів і вібрацій, які створюються при її рухові.
Від плавності ходу залежить:
– самопочуття пасажирів і водія;
– збереження машини і вантажу;
– безпека руху;
– продуктивність і економічність роботи;
– довговічність машини.
У тракторів незадовільна плавність ходу, крім того, негативно впливає на тягові властивості і агротехнічні показники, особливо при роботі з навісними машинами.
Недостатня плавність ходу обумовлює виникнення неприємних і шкідливих коливань. Тому при вивченні плавності ходу машини розглядаються коливання її основних мас.
Плавність ходу залежить від характеру і величини сил, що діють на машину і викликають коливання; від загальної компоновки машини і окремих її конструктивних особливостей, головним чином від системи підресорювання; майстерності водія.
Сили, які викликають коливання, створюються під дією внутрішніх і зовнішніх причин.
Внутрішніми причинами виникнення коливань є:
– незрівноваженість деталей двигуна і трансмісії;
– нерівномірність обертання деталей двигуна і трансмісії;
– сили інерції кривошипно-шатунного і газорозподільного механізмів;
– перемотування гусеничного ланцюга зірочкою гусеничного трактора.
|
|
|
Зовнішніми причинами виникнення коливань є:
– нерівності поверхні дороги або поля;
– зміна величини сили тяги на гаку, обумовлена безсистемною непрогнозованою зміною опору грунту робочим органам плуга, машини або знаряддя;
– змінний вітер.
Під впливом внутрішніх причин виникають головним чином високочастотні коливання – вібрації, які на людину впливають несуттєво.
Під впливом зовнішніх причин підресорені частини машини мають 6 степенів вільності (рис. 10.1):
– лінійні коливання:
– по вісі z-z: підстрибування;
– по вісі x-x: подьоргування;
– по вісі y-y: пошатування;
– кутові коливання:
– по вісі z-z: виляння (рискання);
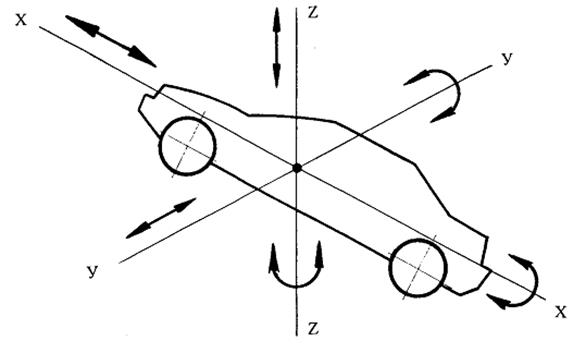
Рис. 10.1. Схема степенів вільності машини
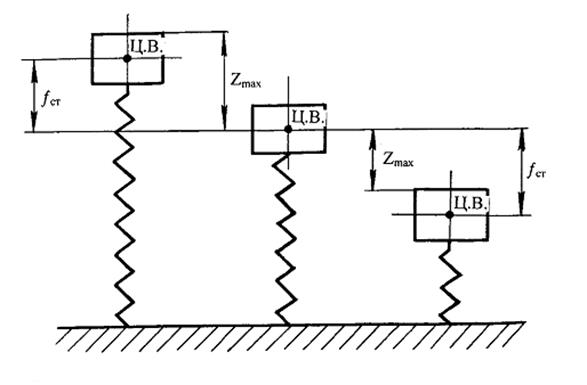
Рис. 10.2. Схема коливальної системи з однією степенню вільності
– по вісі x-x: покачування;
– по вісі y-y: галопування.
10.2. Характеристики поверхні доріг
Найважливішими із зовнішніх причин, які обумовлюють виникнення коливань, є нерівності дороги (поля). Тому при подальшому вивченні коливань плавність ходу будемо розглядати з точки зору впливу на коливання нерівностей дороги.
При рухові колісної машини низькочастотні коливання виникають при переїзді випадкових, періодичних або одиноких вибоїн або нерівностей, які зустрічаються на дорозі.
На дорогах з твердим покриттям нерівності звичайно розподіляються на хвилі і вибоїни. Хвилі мають вигляд плавних підвищень і понижень поверхні, які створені внаслідок дефектів дорожнього покриття. Вибоїни – це дефекти покриття, які створюються у процесі експлуатації дороги. По мірі погіршення стану поверхні дороги число вибоїн збільшується, а довжина нерівностей зменшується.
Профіль грунтових і гравійних доріг менш стабільний і часто змінюється, особливо осінню і весною. У цей час дорога має підвищену вологість. Тому із-за різкого пониження механічних властивостей грунту профіль дороги значно деформується рухомим транспортом. Профіль грунтової дороги також залежить від виду грунту: чорнозем, суглинок, супісок або їх різновиди.
|
|
|
Польові нерівності у значній мірі мають закономірний характер. Він обумовлений агротехнікою вирощування культур. До характерних польових нерівностей можуть бути віднесені:
а) звальні гребні і борозни, які залишаються після оранки. Вони можуть мати висоту (глибину) 75…150 мм і знаходитись на відстані 300…350 мм;
б) гребні рядків, які створюються при посіві культур. Вони можуть мати висоту 50…100 мм і знаходитись на відстані 10…700 мм;
в) гребні рядків, які створюються при обробці просапних і технічних культур. Вони можуть мати висоту 100…200 мм і знаходитись на відстані 500…700 мм.
Для опису характеристик впливу нерівностей на трактори та автомобілі широко застосовуються методи теорії випадкових величин. Більш точну оцінку забезпечують методи випадкових функцій. При використанні статистичних методів необхідна обширна і достовірна інформація про мікропрофіль дороги (поля). Таку інформацію отримують за допомогою механічних полілографів, акселометрів на платформах і спеціальної апаратури для аналізу прискорень і переміщень. За допомогою полілографів визначають мікропрофіль. Акселометрами визначають прискорення і сповільнення машини.
10.3. Вплив коливань на людину
Людина звикає до тих коливань, які зустрічаються у її повсякденному житті – вертикальних коливань тіла під час ходьби. Такі коливання не впливають на стан здоров’я. Вони мають частоту 67…89 коливань/хв при довжині кроку 0,75 м і середній швидкості 3…4 км/г. При швидкості 5 км/г частота коливань становить 110 кол/хв.
У легкових автомобілів частоти власних вертикальних коливань підресореної маси знаходяться у межах 60…80 кол/хв, вантажних автомобілів – 100…130 кол/хв.
Людський організм реагує наступним чином на коливання:
– < 50 кол/хв – наступає укачування;
– 130 кол/хв – сприймається як неприємна тряска;
– 200…300 кол/хв – неблагоприємно впливає на людину із-за приближення до частоти власних коливань організму.
10.4. Рівняння коливань
Коливальна система машини складається із мас, на які діють коливання; пружних елементів, які сприймають і пом’якшують поштовхи; опорів, які запобігають коливанням.
|
|
|
При дослідженні коливань всі маси машини розподіляються на дві групи:
1. Підресорені маси – маси, які мають пружні елементи опори (підвіски). Такими масами є рама з кузовом і кабіною;
2. Непідресорені маси. До них відносяться мости з колесами.
Масу деталей, які одночасно кріпляться до підресорених і непідресорених мас (підвіска, амортизатори, карданні вали) розподіляють порівно між ними.
Із теорії коливань відомо, що у всякій підресореній системі є точка, яку називають центром пружності системи. Вона має наступні властивості: якщо до неї прикладена вертикальна сила, то вся система буде коливатися лише у вертикальному напрямку; якщо сила прикладена поза цієї точки, то вся система буде здійснювати вертикальні і кутові коливання.
Із-за складності дослідження системи із багатьма степенями вільності, звичайно, при елементарному аналізі плавності ходу машини, розглядають лише два вида коливань, які найбільш чуттєво діють на людський організм: вертикальні – підстрибування; кутові – галопування.
Взаємозв’язок між окремими вимірювачами коливань приблизно може бути встановлений при вивченні гармонічного коливання маси з однією степінню вільності (рис. 10.2).
При рухові машини підресорені маси коливаються з частотою, близькою до частоти вільних коливань, тобто коливань, які здійснюються за рахунок енергії, накопиченої при відхиленні від положення рівноваги (положення ІІ).
Диференціальне рівняння вільних коливань центра пружності (Ц.П.) при відсутності опорів у коливальній системі має наступний вигляд
m  + cZ = 0, (10.1)
+ cZ = 0, (10.1)
де m – маса підресореної частини машини, Н;
– прискорення центра пружності, м/с2;
с – сумарний приведений коефіцієнт жорсткості передньої і задньої підвіски, Н/с2;
Z – вертикальне переміщення Ц.П., м.
Сумарний приведений коефіцієнт жорсткості підвіски дорівнює
с = с1 + с2 =  , (10.2)
, (10.2)
де с1 і с2 – приведені коефіцієнти жорсткості передньої і задньої підвісок, Н/с2;
|
|
|
g – прискорення вільного падіння, м/с2;
f ст – статичне прогинання Ц.П., м.
Після відповідних математичних перетворень рівняння (10.1) знаходимо величину можливого вертикального переміщення центра пружності. Вона визначається за залежністю
Z = K1 cos  t + K2 sin t, (10.3)
t + K2 sin t, (10.3)
де K1 і K2 – коефіцієнти зв’язку передньої і задньої підвісок, м;
t – час від початку коливань до відповідного моменту, який вибраний для досліджень, с.
Для отримання числового значення Z у рівняння (10.3) підставляємо значення K1= 0; K2 = Z max = A. Тому рівняння (10.3) записуємо так
Z = A sin t, (10.4)
де A – амплітуда коливань, м.
Замість значення під коренем у рівняння (10.4) підставляємо відповідне умовне позначення і отримуємо
Z = A sin w t, (10.5)
де w – кутова швидкість (частота) коливань, с-1.
Період вільних коливань в секундах визначається за залежністю
T =  = 2π
= 2π  . (10.6)
. (10.6)
При розрахунках, звичайно, користуються технічною частотою коливань за хвилину замість кутової частоти коливань за секунду.
Технічна частота коливань в хв-1 становить
n =  =
=  w, (10.7)
w, (10.7)
де π – постійний коефіцієнт, рівний 3,14.
З урахуванням рівняння (10.2) визначаємо значення w (рівняння (10.4 і 10.5))
w = =  =
=  =
=  . (10.8)
. (10.8)
Із рівняння (10.8) видно, що чим “м’якша” підвіска, тим менша частота вільних вертикальних коливань. Застосування “м’яких” підвісок підвищує комфортабельність їзди на машині.
Оскільки результуюча вертикальних сил інерції, які створюються при виводі коливальної системи із рівноваги, прикладена в центрі ваги системи, то чим ближче розташований центр пружності до центру ваги, тим менша схильність машини до галопування.
10.5. Вимірювачі плавності ходу
Коливальний процес характеризується такими величинами: ампліту-дами, частотами (формули 10.8, 10.4, 10.5, 10.7), швидкістю коливань, прискореннями і швидкістю зміни прискорень.
Швидкість коливань записується у вигляді залежності, яка є похідною переміщення відносно часу (формула 10.5)
 = A w cos w t. (10.9)
= A w cos w t. (10.9)
При частотах до 300… 360 кол/хв, у межі яких повністю вкладається весь низькочастотний діапазон коливань автомобілів і тракторів, самопочуття водія або тракториста у першу чергу пропорційні вертикальним прискоренням, які є другою похідною переміщення відносно часу
 = - Aw 2 sin w t. (10.10)
= - Aw 2 sin w t. (10.10)
Від величини вертикальних прискорень залежить також збереженість вантажу. Якщо прискорення кузова більше прискорення вільного падіння g, то прискорення вантажу при ударі по днищі кузова можуть досягати значень 20… 40 g.
При оцінюванні плавності ходу, крім величини вертикальних прискорень, необхідно також враховувати їх повторність. Інтенсивність і частота зміни цих двох зовнішніх подразнювачів суттєво впливає на стомлювання водія.
Якщо величина прискорення 3… 5 м/с2, а число відповідних їм поштовхів не більше 1… 2 на 1000 м шляху, то плавність ходу признається доброю. При таких же прискореннях, але при кількості поштовхів 10… 12, плавність ходу машини на даній дорозі буде посередньою. Плавність ходу оцінюється по спеціальній п’ятибальній шкалі: відмінно, добре, посередньо, незадовільно, дуже погано.
Крім величини вертикальних прискорень та їх повторності на стан людини суттєво впливає швидкість наростання прискорення, тобто третя похідна переміщення відносно часу
 = - Aw 3 cos w t. (10.11)
= - Aw 3 cos w t. (10.11)
Швидкості зміни прискорень до 25 м/с3 створюють тривожні відчуття, а при 40 м/с3 – неприємні. Це відбувається тому, що при швидкому зростанні передаваємих поштовхів захисні реакції, які виробляються проти них в організмі людини шляхом відповідного напруження м’язів, не встигають своєчасно створюватися або бувають недостатніми.
Плавність ходу також оцінюється середньоквадратичною величиною вертикальних прискорень в м/с2
s =  , (10.12)
, (10.12)
де n – число класів, на яке розподілений весь діапазон заміряємих величин;
xi – середнє значення прискорення в даному класі;
x – середнє значення прискорення за час досліду;
mi – число спостережень, зафіксованих у даному класі;
N – загальна кількість спостережень за час досліду.
Величина s залежить від швидкості руху машини. Рекомендоване значення середньо квадратичного прискорення вертикальних коливань сидіння тракториста було не більше як 0,1g при роботі трактора на стерні з вологістю грунту 10… 12 % при рухові зі швидкістю 9… 10 км/г поперек борозни попередньої оранки.
10.6. Гасіння коливань
Неприємна дія коливань на людину зменшується застосуванням в конструкції машини: еластичної (пружної) підвіски; шин коліс; гумових амортизаторів; системи підвіски сидіння водія або тракториста.
Для поглинання значної частини енергії коливального процесу в систему підвіски машини встановлюються амортизатори.
Роль амортизатора в підвісці оцінюється такими показниками: коефіцієнтом затухання вертикальних коливань; відносним коефіцієнтом затухання вертикальних коливань; частотою затухання коливань. Вплив ресор і пневматичних шин в коливальній системі оцінюється приведеним коефіцієнтом жорсткості.
Величина коефіцієнта затухання вертикальних коливань в с-1 визначається за залежністю
h =  , (10.13)
, (10.13)
де ka – коефіцієнт опору амортизатора, Н·с2/м;
mk – підресорена маса, яка припадає на одне колесо, Н·с2/м.
Відносний коефіцієнт затухання вертикальних коливань становить
 =
=  . (10.14)
. (10.14)
Величина коефіцієнта знаходиться у межах 0,15… 0,30.
Частота затухання коливань (коефіцієнт аперіодичності) дорівнює
w0 = w  . (10.15)
. (10.15)
Приведений коефіцієнт жорсткості в Н/м визначається за формулою
Спр =  =
=  =
=  , (10.16)
, (10.16)
де G – вага машини, Н;
fп – прогинання підвіски, м;
fш – прогинання шини, м;
сп – жорсткість підвіски, Н/м;
сш – жорсткість шини, Н/м.
10.7. Коливальна система колісного трактора
Трактор на пневматичних шинах можливо розглядати як коливальну систему, в якій роль пружних і демпфіруючих елементів виконують шини, а остов трактора є непідресореною масою. Відсутність у тракторів підресорування задньої частини остова створює важкі умови для роботи тракториста, особливо при рухові по поганим дорогам або в умовах бездоріжжя чи поперек звальних борозд.
Частота власних коливань заднього моста в таких умовах залежить від тиску повітря в шинах. Числове значення частоти коливань знаходиться у межах 160… 200 кол/хв. Такі значення перевершують сприятливі межі для людського організму.
Для зменшення несприятливої дії коливань на тракториста застосовується підресорування його крісла (сидіння). Задачею підресорування є зниження частоти коливань сидіння у порівнянні з частотою коливань заднього моста і швидке гашення створених коливань.
Система підресорування сидіння складається із пружних елементів, віброізоляційних матеріалів і гасників коливань.
При раціональній кінематиці підвіски сидіння його крісло повинно мати одну ступінь вільності і виконувати лише вертикальні коливання. Принципова схема коливальної системи трактора приведена на рис. 10.3.
На рис. 10.3 прийняті такі позначення: m – маса трактора без сидіння, яка приходиться на задні колеса, кг; m1 – маса сидіння з трактористом, кг; сш і с1 – жорсткість шини і пружного елемента сидіння, кг/м; kш і kам1 – коефіцієнт опору шини і амортизатора сидіння.
Для спрощення приймемо, що коливання заднього моста мають зако-номірний характер і створюють періодичну силу, яка обумовлює коливання, частота якої дорівнює частоті w власних коливань моста. Величина сили, яка обумовлює коливання трактора з сидінням в Н у цьому випадку дорівнює
P = P0 sin w t, (10.17)
де P0 – максимальне значення сили, яка обумовлює коливання, Н.
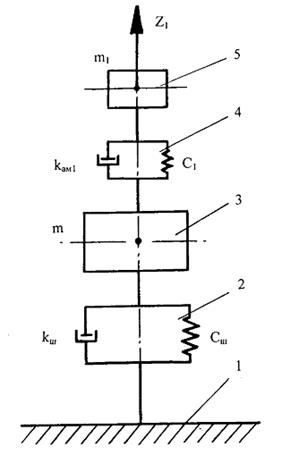
Рис. 10.3. Принципова схема коливальної системи заднього моста колісного трактора з підресореним сидінням і трактористом:
1 – дорога (поле); 2 – шина; 3 – трактор; 4 – підвіска сидіння
тракториста; 5 – тракторист з сидінням
Диференційне рівняння вимушених коливань сидіння без урахування опорів в його підвісці має наступий вигляд
m1  + c1Z1 = P, (10.18)
+ c1Z1 = P, (10.18)
де Z1 – величина вертикального переміщення сидіння, м;
– прискорення сидіння, м/с2.
Величина вертикального переміщення сидіння у цьому випадку обчислюється за залежністю
Z1 = 
 sin w t, (10.19)
sin w t, (10.19)
де  – величина прогинання пружного елемента сидіння при статичній дії на нього сили P0, м;
– величина прогинання пружного елемента сидіння при статичній дії на нього сили P0, м;
w1 – кутова частота власних коливань сидіння, с-1;
– коефіцієнт, який характеризує динамічність дії.
Максимальні переміщення сидіння можливі у тому випадку,
коли sin w t = 1. Рівняння (10.18) при цьому приймає вигляд
Z1max =  . (10.20)
. (10.20)
Із рівняння (10.19) видно, що амплітуда коливань сидіння суттєво залежить від відношення частот w1 і w. Якщо ці частоти співпадають, то наступає резонанс: Z1max = ¥.
Для запобігання резонансних коливань необхідно, щоб частота власних коливань сидіння w1 значно відрізнялась від частоти сили, яка обумовлює коливання, w (частоти власних коливань остова трактора). Це досягається підбором жорсткості пружного елемента сидіння. Оптимальне співвідношення частот w1 / w знаходиться у межах 0,5…0,6. Для забезпечення такого співвідношення при різній вазі трактористів або водіїв підвіски більшості крісел обладнані пристроєм для зміни попереднього стискування (натягу) пружного елемента.
Питання для самопідготовки та самоконтролю
1. Що таке плавність руху трактора і автомобіля? У чому різниця вимушених коливань машини від незалежних (вільних)?
2. Як впливають на водія частоти коливань трактора і автомобіля? Якими критеріями оцінюють коливальний процес та як їх визначають?
3. Методика експериментальної оцінки плавності руху трактора і автомобіля.
4. Типи підвісок трактора і автомобіля. Як впливають шини на плавність руху трактора і автомобіля?
5. У чому суть ергономічної оцінки тракторів? Які показники характеризують ергономічний рівень якості трактора?
11. Основи розрахунку шасі тракторів і автомобілів
11.1. Загальні положення
У посібнику викладені теоретичні основи конструювання і розрахунку тракторів і автомобілів з урахуванням особливостей їх експлуатації.
Розвиток конструкцій тракторів і автомобілів пов'язаний з удосконаленням перш за все елементів трансмісії, ходової частини та систем керування. Особлива увага при конструюванні приділяється зниженню ваги, застосовуючи більш раціональну їх компоновку, легкі сплави і пластмаси. Серед багаточисленних вимог, які висуваються до сільськогосподарських тракторів та машин, можливо виділити декілька самих важливих.
Надійність машини є комплексною властивістю, яка в залежності від призначення машини та умов її експлуатації може включати безвідмовність, довговічність, ремонтопристосованість, збереженість. Одним із основних показників безвідмовності є ймовірність безвідмовної роботи, тобто, вірогідність того, що в межах заданого напрацювання в годинах або кілометрах пробігу поломка не з’являється.
Пристосованість до технічного обслуговування і ремонту характеризується періодичністю, трудомісткістю технічного обслуговування та ремонту.
Тягово-зчіпні (тягово-швидкісні) якості, прохідність, які забезпечують високі зчіпні властивості при роботі машин в різних грунтово-кліматичних умовах.
Міцність, довговічність і спрацювання деталей трактора і автомобіля визначають по фактичним навантаженням, які діють на ці деталі.
Розрахунок деталей, вузлів і механізмів у повному обсязі розглядається у навчальному курсі дисципліни «Деталі машин». Тому у курсі дисципліни «Основи теорії і розрахунку трактора і автомобіля» розглянемо особливості розрахунку деталей, вузлів і механізмів стосовно трансмісії трактора і автомобіля.
11.2. Розрахунок фрикційних муфт зчеплення
Розрахунковий момент муфти зчеплення в Н визначається за залежністю
Мм.р = β · Мдн = μ · Q · Rср z, (11.1)
де β – коефіцієнт запасу муфти зчеплення;
Мдн – номінальний крутний момент двигуна, Н·м;
μ – коефіцієнт тертя робочої поверхні. Числові значення μ приведені в табл. 11.1;
Q – сила стискування поверхонь тертя, Н;
Таблиця 11.1
Значення коефіцієнтів тертя μ та припущених тисків q0
| Матеріали поверхні тертя | Сухе тертя | Тертя в мастилі | ||
| μ | q0 | μ | q0 | |
| Сталь по сталі або чавуну | 0,15…0,20 | 20…40 | 0,05…0,10 | 60..100 |
| Сталь по райсбету або мідно-азбестовій плетінці | 0,25…0,35 | 10…25 | 0,08…0,15 | 20…40 |
| Сталь по азбобакеліту | 0,40…0,45 | 20…30 | 0,08…0,15 | 20…50 |
| Сталь по азбокаучуку | 0,40…0,50 | 5…20 | 0,08…0,15 | 10…30 |
| Сталь по металокераміці | 0,40…0,55 | 40…60 | 0,09…0,12 | 120…200 |
 м – середній радіус тертя;
м – середній радіус тертя;
Дз і Дв – зовнішній і внутрішній діаметри фрикційних накладок, м;
z – число пар поверхонь тертя.
Звичайно Дв = (0,5…0,7)Дз. Зовнішній діаметр обмежується розмірами маховика.
Для транспортних тракторів і автомобілів β = 1,2…2,0; для автомобілів з напіввідцентровими муфтами β = 0,85…0,90; для сільськогосподарських тракторів з постійно замкнутими муфтами β = 2,0…2,5; з постійно замкнутими без компенсаційних пружин β = 2,0…4,0; з компенсаційними пружинами β = 2,0…2,5.
Ширина поверхні тертя в см визначається так
 (11.2)
(11.2)
Необхідна сила стискування поверхні тертя в Н обчислюється за рівнянням
 (11.3)
(11.3)
де q0 – припущений питомий тиск, Н/см2. Числові значення q0 приведені в табл. 11.1.
У випадку Дв = 0,6 Дз см і Rср = 0,4 Дз см маємо
Q = q0 · π · R2ср, Н. (11.4)
Потрібне число пар поверхонь тертя визначається так
 . (11.5)
. (11.5)
У випадку Дв = 0,6 Дз розраховуємо
 . (11.6)
. (11.6)
Робота буксування муфти при розгоні в Н  м визначається за залежністю
м визначається за залежністю
 (11.7)
(11.7)
де ωд – кутова швидкість обертання колінчастого валу, с-1;
Ід, Іс – момент інерції двигуна і приведений момент інерції агрегату, Н м с2.
Питома робота буксування муфти зчеплення в Н м с2 становить
|
|
|
|
|
Дата добавления: 2017-02-01; Просмотров: 103; Нарушение авторских прав?; Мы поможем в написании вашей работы!