КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Проектирование корректирующего фильтра.
|
|
|
|
Найгіршим з точки зору точності відробітку синусоїдального сигналу з робочою частотою являється другий режим.
Тому доцільно скоректувати систему при перевертаючому навантаженні. Для збільшення точності системи введемо в систему фільтр, що коригує, ослабляє амплітудну характеристику приводу на частоті автоколивань, але що по можливості не спотворює амплітудну характеристику на частоті  і фазові характеристики на частоті і
і фазові характеристики на частоті і  .
.
Поставимо інтегро-диференцюючий фільтр з передатною функцією:
 , (1.44)
, (1.44)
 . (1.45)
. (1.45)
Параметри фільтру вибираються так, щоб на частоті автоколивань фазове зрушення той, що вноситься фільтром дорівнював нулю.
ЛАФЧХ коригуючого фільтру прийме вид, що наведено на рис. 1.16.
Рисунок 1.16 - ЛАФЧХ коригуючого фільтру
Для побудови замкнутої ЛАФЧХ скоректованої системи необхідно провести гармонійну лінеаризацію з урахуванням фільтру. Знайдемо амплітуду автоколивань виходячи з виконання рівняння балансу амплітуд на частоті автоколивань:
 , (1.46)
, (1.46)
 (1.47)
(1.47)
 . (1.48)
. (1.48)
Параметр  релейного елементу (ширина петлі гістерезису РЕ) :
релейного елементу (ширина петлі гістерезису РЕ) :
 . (1.49)
. (1.49)
Визначимо Kнел.кор. по формулі:
 . (1.50)
. (1.50)
Построим ЛАФЧХ замкнутой линеаризованной скорректированной системы.
 (1.51)
(1.51)

Рисунок 1.17 - ЛАФЧХ замкнутої системи до і після корекції при позитивному шарнірному моменті
З аналізу частотних характеристик можна визначити фазове зрушення замкнутої скоректованої системи при позитивному шарнірному моменті на робочій частоті  .
.
|
|
|
Визначимо також постійну часу еквівалентної аперіодичної ланки, знаючи фазове зрушення на робочій частоті.
 . (1.52)
. (1.52)
Проведемо цифрове моделювання роботи скоректованої системи.

Рисунок 1.18 - Реакція скоректованої ГРП на подання синусоїдального вхідного сигналу з робочою частотою ω0
8. Розрахунок конструктивних параметрів. Розрахунок конструктивних параметрів приводу
Необхідно визначити плече механічної передачі  , діаметр поршня силового циліндра
, діаметр поршня силового циліндра  , величина вільного ходу приводу
, величина вільного ходу приводу  . При визначенні плеча
. При визначенні плеча  треба задатися співвідношенням між вільним ходом поршня і його діаметром.
треба задатися співвідношенням між вільним ходом поршня і його діаметром.
З міркувань компактності конструкції силового циліндра, що розробляється, зазвичай використовується наступне співвідношення:
 . (1.53)
. (1.53)
При переміщенні  максимальний момент, що створюється приводом, повинен в
максимальний момент, що створюється приводом, повинен в  раз перевершувати максимальний момент від навантаження:
раз перевершувати максимальний момент від навантаження:
 . (1.54)
. (1.54)
З урахуванням прийнятого співвідношення з останньої рівності отримаємо залежність:
 . (1.55)
. (1.55)
Максимальний перепад тисків в порожнинах силового циліндра  залежить від величини
залежить від величини  , типу і співвідношень геометричних розмірів розподільного пристрою, а також від інтенсивності теплообміну в порожнинах. При розрахунках величини можна орієнтовно приймати для приводів з ГРП типу сопло-заслінка
, типу і співвідношень геометричних розмірів розподільного пристрою, а також від інтенсивності теплообміну в порожнинах. При розрахунках величини можна орієнтовно приймати для приводів з ГРП типу сопло-заслінка  .
.
При розрахунку величини величина повинна відповідати 1-у режиму роботи приводу.
При відносно малих значеннях кута  :
:
 , (1.56)
, (1.56)
 ;
;  . (1.57)
. (1.57)
Визначеємо об'єм робочої порожнини з урахуванням зроблених раніше припущень:
 , (1.58)
, (1.58)
 . (1.59)
. (1.59)

Рисунок 1.19 - Вид приводу
8.2 Розрахунок параметрів ГРП
|
|
|
Розрахунок ГРП ведеться, виходячи з вимог до максимальної швидкості приводу  . Тобто, необхідно, щоб в найгіршому випадку (при негативному шарнірному моменті) забезпечувалася швидкість приводу не нижче
. Тобто, необхідно, щоб в найгіршому випадку (при негативному шарнірному моменті) забезпечувалася швидкість приводу не нижче  , де
, де  - значення максимальної кутової швидкості (визначена вище).
- значення максимальної кутової швидкості (визначена вище).
Як розподільник використовується газорозподільний пристрій «струминна трубка». Такий пристрій реалізує регулювання газового потоку «на виході». Максимальна швидкість приводу, що встановилася, визначається залежністю:
 . (1.60)
. (1.60)
З цієї залежності виходить, що:
 , (1.61)
, (1.61)
де  ,
,  ,
,  - коефіцієнти, характеризуючі ГРП:
- коефіцієнти, характеризуючі ГРП:
- коефіцієнт ефективності ГРП на виході;
- коефіцієнт ефективності ГРП на вході;
- величина, що характеризує співвідношення вхідного і вихідного перерізів ГРП (  ).
).
Оскільки як ГРП використовується струминна трубка, то:
 , (1.62)
, (1.62)
 . (1.63)
. (1.63)
Температура в джерелі прийнята рівною  , що відповідає найгіршим умовам функціонування приводу
, що відповідає найгіршим умовам функціонування приводу  . З цих міркувань знаходиться величина
. З цих міркувань знаходиться величина  (
(  ),
),  , (
, (  ) і
) і  :
:
 , (1.64)
, (1.64)
 , (1.65)
, (1.65)
 . (1.66)
. (1.66)
Після розрахунку величин  ,
,  ,
,  та визначаються основні геометричні розміри розподільника.
та визначаються основні геометричні розміри розподільника.
Діаметр приймального вікна розподільника визначається з умови:
 , (1.67)
, (1.67)
звідки  , (1.68)
, (1.68)
де коефіцієнт витрати  .
.
Згідно з рекомендаціями, виробленими інженерною практикою, доцільно призначати наступні співвідношення геометричних розмірів струйного розподільника:
 , (1.69)
, (1.69)
 , (1.70)
, (1.70)
 . (1.71)
. (1.71)
Величина максимального переміщення кінця струминної трубки :
 , (1.72)
, (1.72)
Довжина струминної трубки :
 . (1.73)
. (1.73)
При відомому значенні  обчислюємо величини b і d.
обчислюємо величини b і d.
 , (1.74)
, (1.74)
 . (1.75)
. (1.75)
Висновок
В результаті виконання курсового проекту виконано проектування автоколивальної силової системи управління. На основі спрощених залежностей був проведений аналіз динамічних характеристик пневмодвигуна і усієї системи рульового приводу автомобіля, визначені параметри автоколивань, зроблений синтез коригуючого фільтру, що вимагається для збільшення точності роботи системи, цифрове моделювання системи рульового приводу і вибір початкових параметрів системи.
|
|
|
Список літератури:
1. Белкин И. М. Справочник по допускам и посадкам для рабочего машиностроителя / И.М. Белкин. – М.: “Машиностроение”, 1985. – 325 с.
2. Бессекерский В. А. Руководство по проектированию систем автоматического управления / В.А. Бессекерский. - М.: Высшая школа, 1983. – 245 с.
3. Бондарев В.Н. Цифровая обработка сигналов: методы и средства: Учеб. пособие для вузов / Бондарев В.Н., Трёстер Г., Чернега В.С. - Севастополь: СевГТУ, 1999. - 398 с.
4. Віниченко В.С. Мікропроцесорні засоби на транспорті / В.С. Віниченко. – Харків: ХДАМГ, 2002. – 215 с.
5. Власов В.М. Телематика на автомобильном транспорте / [В.М. Власов, С.В. Жанказиев, В.Б. Николаев и др.]. – М.: МАДИ (ГТУ), 2003. – 175 с.
6. Гируцкий О.И. Электронные системы управления агрегатами автомобиля / О.И. Гируцкий, Ю.К. Есеновский-Лашков, Д.Г. Поляк. - Москва: Транс-порт, 2000. - 213с.
7. Голобородько О.О. Мехатронні системи автомобільного транспорту / О.О. Голобородько, О.О. Коробочка. – Харків: ТОВ «СМІТ», 2006.- 300с.
8. Деревицкий Д.П. Прикладная теория дискретных адаптивных систем управления / Д.П. Деревицкий, А.Л. Фрадков. – М.: Наука, 1981. – 216 с.
9. ЕСКД Справочное пособие - М.: Издательство стандартов, 1989. – 123 с.
10. Шорников Е.Е. Проектирование автоматических систем: Учебное пособие / Е.Е. Шорников. – Тула, ТПИ, 1984. – 260 с.
11. Шорников Е.Е. Газовые и гидравлические САУ: Методические указания по выполнению курсовой работы / Е.Е. Шорников, В.И. Чекмазов. - Тула, ТПИ, 1986. – 56 с.
Додаток

Рисунок 1.20 - Схема моделювання системи при пружинному навантаженні
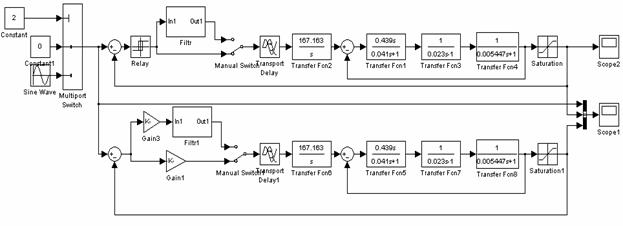
Рисунок 1.21 - Схема моделювання системи при перекомпенсаційному навантаженні
|
|
|
|
|
Дата добавления: 2023-11-19; Просмотров: 45; Нарушение авторских прав?; Мы поможем в написании вашей работы!