КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
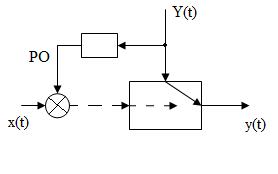
Лекция №2. В принципе регулирования по отклонению обратная связь может быть положительной и отрицательной
|
|
|
|
В принципе регулирования по отклонению обратная связь может быть положительной и отрицательной. При положительной обратной связи система на выходе генерирует возрастающие колебания и со временем становится неработоспособной. В отличие от этого отрицательная обратная связь способствует затуханию выходных колебаний системы и, как следствие, переходу и установившемуся состоянию. При отрицательной обратной связи система работоспособна.
Регулирование по возмущению.
Суть данного принципа состоит в том, что внешние возмущения измеряются и компенсируются с помощью различных устройств и система на выходе приходит также в установившееся состояние.
Преимуществом регулирования по отклонению является стабильная работа системы на достаточно длительном промежутке или интервале времени. Однако под воздействием различных внешних и внутренних возмущений возможна генерация выходных колебаний параметра. При этом система может выйти из устойчивого состояния.
В системах автоматического управления используется отрицательная обратная связь.
В отличие от предыдущего принципа (по отклонению), принцип по возмущению обладает более высоким быстродействием, что благоприятно сказывается на поддержании регулируемого выходного параметра.
Однако данный способ имеет тот недостаток, что выходной параметр, может уходить со временем от своего заданного значения. Вторым недостатком является то, что возмущений системы может быть множество, а значит, на каждое из них невозможно поставить компенсирующее устройство, поэтому, чтобы избавиться от недостатков 1-го и 2-го регулирования переходят к комбинированным системам регулирования.
Комбинированная система:
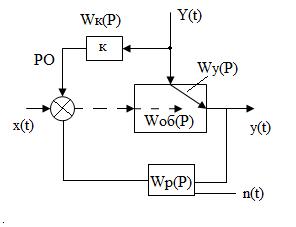
 - математическое описание комплекса.
- математическое описание комплекса.
 - математическое описание возмущения.
- математическое описание возмущения.
 - математическое описание регулирования.
- математическое описание регулирования.
 - математическое описание объекта.
- математическое описание объекта.
Классификация физических систем.
Под физической системой понимают совокупность взаимосвязанных и взаимодействующих элементов произвольной физической природы, обособленных по тому или иному принципу (признаку), от среды которых система функционирует. К числу таких относится САУ.
В связи с принятым признаком или свойством для системы ее классифицируют на следующие:
1. Статическая – система, в которой значение выхода и входа связаны функциональной зависимостью в один и тот же момент времени, т.е. понятие времени в статических системах отсутствует.
Динамические характеристики. В них выходной параметр данный момент времени зависит не только от выходной величины во времени, но и от производных этих выходных величин.
Динамическая характеристика – это характеристика, в которой аргументом является время.
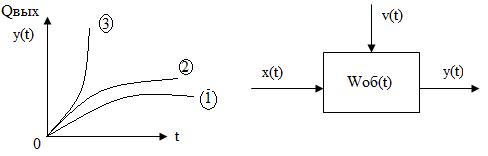
Изменения выходных параметров объектов под воздействием любых возмущений определяется как динамическая характеристика, а система называется динамической системой.
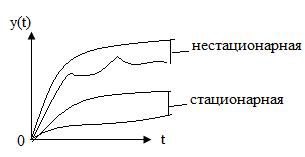
1. Стационарные и нестационарные системы.
В стационарных системах закон преобразования входной величины в выходную не изменен, не зависит от времени.
Нестационарные - не обладают этим свойством.
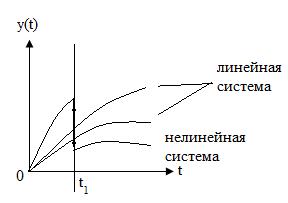
2. Линейные и нелинейные системы.
В линейных системах входные и выходные величины связаны между собой линейными зависимостями (линейно-дифференциальное уравнение с постоянными коэффициентами).
Нелинейная система отображает связь входа и выхода системы через нелинейные зависимости.
4. Детерминированные и стахостические.
Детерминированные системы – определенные.
Стахостические – вероятностные системы.
В детерминированных системах коэффициентом автоматической зависимости, связывающей вход и выход системы, постоянны или же меняются по заранее заданному закону (зависимости).
В стахостических системах коэффициенты меняются по законам теории вероятности, поэтому поведение таких систем можно представить лишь в среднестатистическом смысле.
 - детерминированная система.
- детерминированная система.
К1, К – const
 - стахостическая система.
- стахостическая система.
5. Многомерные и многосвязные системы.
Многомерность – множество входов и множество выходов.


На реальном производстве в виду его сложности все системы можно считать многомерными и многосвязными, однако степень влияния различных параметров не одинакова. Поэтому имеется возможность разбить сложные структуры на локальные системы с более простым математическим описанием, учитывая лишь наиболее весомые воздействия.
Большинство промышленных и с/х объектов можно считать нелинейными структурами, однако для промышленных целей есть смысл в рамках установленной точности аппроксимировать их линейными аналогами, такая операция называется линеоризацией.

Линеоризованная характеристика решается как линейная зависимость.
Линеоризация характеристик – это замена их нелинейных функций их приближенными аналогами. Если не требуется высокая точность, то могут в качестве аналогов использоваться более грубые модели. В тоже время там, где линейная функция имеет разрывы, применяют точные методы анализа. Например, гармоническая линеоризация или статистическая линеоризация.
Переходя к конкретным системам, в общем случае необходимо следующее.
Зная описание объекта регулирования, зная математическую модель датчика, регулирующих органов и различных возмущений на объект в математической форме, всегда можно подобрать регулятор с таким математическим описанием, что он будет отслеживать отклонение регулируемого параметра в допустимых пределах.
Т.о. задача состоит в использовании различных математических описаний и зависимостей для каждого элемента, которые позволяют управлять единым технологическим циклом.
Предыдущий вывод называют анализом и синтезом систем автоматического управления (САУ).
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 935; Нарушение авторских прав?; Мы поможем в написании вашей работы!