КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основні типи кулачкових механізмів
|
|
|
|
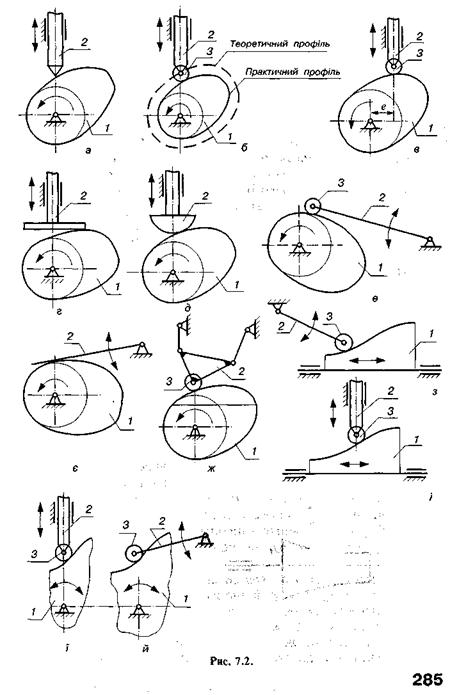
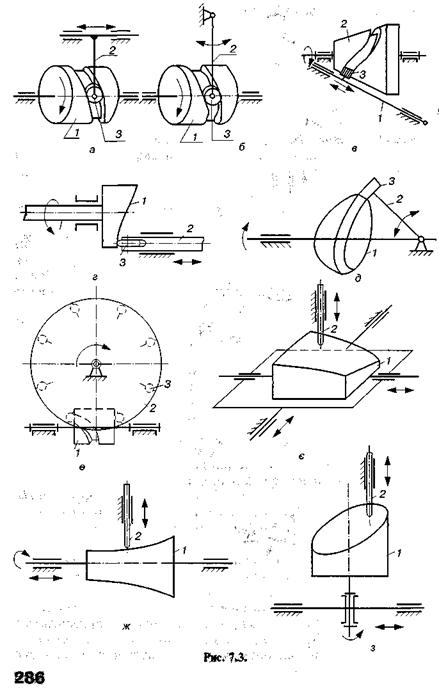
Кулачкові механізми, так само як і важільні або зубчасті, можуть бути плоскими і просторовими. На рис. 7.2 показано основні типи плоских кулачкових механізмів, на рис. 7.3 — просторових. У плоских механізмах усі точки їх ланок рухаються в паралельних площинах, у просторових — в різних площинах. Найбільше поширення дістали плоскі кулачкові механізми, хоча і просторові, особливо з кулачком у вигляді барабана (рис. 7.3, а, б), використовуються досить часто в різних машинах-автоматах як виконавчі механізми.
За видом руху кулачка та вихідної ланки кулачкові механізми поділяють в основному на такі види:
а) механізми, в яких обертовий рух кулачка перетворюєтьсяв зворотно-поступальний рух вихідної ланки — штовхача(рис. 7.2, а—д, рис. 7.3, а—г)
б) механізми, в яких обертовий рух кулачка перетворюєтьсяв зворотно-обертовий (коливальний) рух вихідної ланки — коромисла (рис. 7.2, є, є, з, рис. 7.3, б, д);
в) механізми, в яких зворотно-поступальний рух кулачка перетворюється в зворотно-поступальний рух (рис. 7.2, і) вихідноїланки;
г) механізми, в яких коливальний рух кулачка перетворюється в зворотно-поступальний (рис. 7.2, і) або коливальний(рис. 7.2, й) рух вихідної ланки;
д) механізми, в яких обертовий рух кулачка перетворюєтьсяв складний рух вихідної ланки 2 (рис. 7.2, ж);
є) механізми, в яких обертовий рух кулачка перетворюється в односторонній обертовий рух вихідної ланки (рис. 7.3, є);
|
|
є) механізми, в яких складний рух кулачка перетворюється в зворотно-поступальний або коливальний рух вихідної ланки (рис. 7.3, є, ж, з).
Вихідні ланки в кулачкових механізмах можуть мати різні форми елементів вищої пари, тобто тих частин ланок, якими вони стикаються з кулачком. Форма цих частин може бути загостреною ( рис. 7.2, а ), плоскою ( рис. 7.2, г, є ), циліндричною або сферичною (рис. 7.2, д). Кулачкові механізми із загостреним штовхачем (коромислом) використовуються дуже рідко, оскільки вони мають малу зносостійкість. їх можна застосовувати лише при малих швидкостях і незначних навантаженнях. Вищу несучу здатність мають циліндричні (сферичні) та плоскі штовхачі, але вони також не забезпечують високої зносостійкості через наявність тертя ковзання у вищій парі (парі кулачок—штовхач). На практиці для усунення тертя ковзання у вищій парі вводять проміжну ланку — ролик 3 (див. рис. 7.2, б, в, є, ж—й). Оскільки обертання ролика навколо своєї осі не впливає на кінематику передачі руху від кулачка до вихідної ланки, то кулачкові механізми, які складаються зі стояка, кулачка, ролика і вихідної ланки, називають триланковими (а не чотириланковими). При структурному аналізі таких механізмів ролик можна не враховувати, оскільки він створює зайвий ступінь вільності.
|
|
|
При дослідженні кулачкового механізму з роликовим штовхачем (коромислом) можна завжди дійсний (практичний) профіль кулачка замінити теоретичним (центровим), який віддалений від дійсного профілю кулачка на радіус ролика (рис. 7.2, б). Теоретичний профіль кулачка можна уявити як траєкторію центра ролика З при його обкочуванні навколо кулачка 1. Будь-які точки цих двох профілів рівновіддалені одна від одної вздовж спільної нормалі до кривих, які називають еквідистантними. Заміна дійсного профілю кулачка на теоретичний не змінює кінематичного змісту кулачкового механізму, тобто не змінює характеру відносного руху основних ланок механізму (кулачка і штовхача), але дуже зручна при аналізі та синтезі кулачкових механізмів.
У деяких випадках вісь штовхача необхідно змістити в той чи інший бік відносно осі обертання кулачка (рис. 7.2, в) на величину е, яку називають зміщенням, або ексцентриситетом. Кулачковий механізм у такому разі називають зміщеним кулачковим механізмом. Зміщення штовхача є дещо впливає на закон руху вихідної ланки, дає змогу при однакових інших умовах
|
|
|
зменшити розміри кулачка та боковий тиск штовхача на напрямну.
Просторові кулачкові механізми частіше бувають з циліндричним пазовим (рис. 7.3, а, б, є) або торцевим (рис. 7.3, г, з) кулачком, рідше — з конічним пазовим (рис. 7.3, в) або торцевим сферичним (рис. 7.3, д) кулачком. Для одержання переривчастого обертового руху може використовуватися просторовий кулачковий механізм з пазовим циліндричним кулачком 1, який по черзі взаємодіє з роликами 3 вихідної ланки 2 (рис. 7.3, є).
На рис. 7.3, є—з зображені приклади кулачкових механізмів, які мають два ступені вільності. Такі механізми використовуються переважно в обчислювальних пристроях для механічного знаходження функцій двох змінних. У кулачковому механізмі, зображеному на рис. 7.3, є, вхідна ланка (кулачок) має два незалежних поступальних рухи. Вихідну ланку в таких механізмах іноді називають щупом. Проте більшого поширення дістали механізми, в яких кулачок може обертатися навколо своєї осі і переміщатися вздовж неї. Такі кулачки називаються коноїдними (рис. 7.3, ж). Іноді для одержання руху з двома ступенями вільності використовується просторовий механізм з торцевим кулачком (рис. 7.3, з).
Тип кулачкового механізму вибирають залежно від задачі синтезу, яка, звичайно, містить у собі дані про бажаний вид руху вихідної ланки (поступальний, коливальний, складний), закони руху кулачка, а також деякі розміри ланок кулачкового механізму.
|
|
|
|
|
Дата добавления: 2014-01-20; Просмотров: 2241; Нарушение авторских прав?; Мы поможем в написании вашей работы!