КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Достоинства и недостатки. 4 страница
|
|
|
|
При нажатии на педаль 12 (имеющую фиксирующую защелку 11) кулачок поворачивается вокруг своей оси и через систему регулирования тяг воздействует на поршень цилиндра 8. Поршень выдавливает часть рабочей жидкости из командного цилиндра в исполнительный. Под действием давления рабочей жидкости поршень 4 перемещается влево, давит на шток 5, который рычагами связан с тормозной лентой 1.
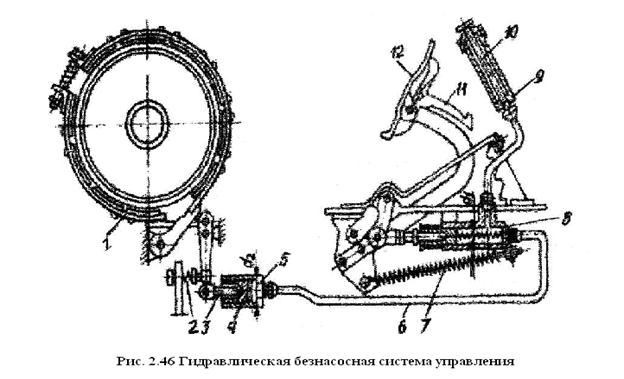
При снятии нагрузки с педали последняя возвращается в исходное положение возвратной пружиной 7, одновременно поршень цилиндра 5 под действием расположенной внутри пружины перемещается влево, а рычаги тормозной системы освобождают ленту от шкива действием возвратной пружины 2. Возможные утечки рабочей жидкости компенсируются поступлением ее из бачка 9 при открытой запорной игле 10. Насосное гидравлическое управление принципиально отличается от безнасосного тем, что необходимое усилие здесь создается насосом, подающим жидкость под давлением в исполнительный цилиндр. При этом не требуется большого усилия на рычагах управления, так как машинист перемещает лишь золотники распределителей, соединяющие исполнительные цилиндры с насосом или сливным баком.
Одним из основных показателей, характеризующих режим работы гидравлических насосных систем управления, является число включений z за 1 ч. По этому показателю различают легкий режим работы (z<300), средний (z - 300... 700) и тяжелый (z>700). К достоинствам гидравлических систем управления относятся компактность и малые размеры пульта управления, рабочих цилиндров и двигателей вследствие применения значительных давлений, возможность передачи усилий к удаленным точкам, отсутствие сложных рычажных систем и шарнирных соединений. При гидравлическом управлении усилие на рычагах управления и их ход значительно меньше, чем при рычажном механическом управлении. Благодаря этому снижается утомляемость машиниста и повышается производительность труда.
Недостатками гидравлических систем являются резкость включения механизмов, в результате чего возникают динамические нагрузки, необходимость применения специальных сортов рабочих жидкостей, затруднения при эксплуатации машин в условиях жаркого и холодного климата, повышенный класс точности изготовления гидроаппаратуры
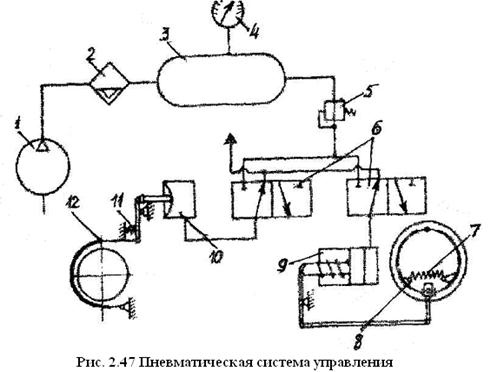
Пневматические системы управления отличаются от гидравлических тем, что в них вместо жидкости использован сжатый воздух. На рис. 2.47 приведена принципиальная схема пневматической системы управления. В этой системе сжатый воздух от компрессора 1 поступает в масловлагоотделитель 2 и затем в ресивер 3. Контроль давления воздуха в системе осуществляется манометром 4, а сброс его избытка — предохранительным клапаном 5. От ресивера воздух направляется к распределителям 6, а затем к рабочей камере 10 и пневмоцилиндру 9, которые управляют соответственно ленточным 12 и колодочным 8 тормозами машины. Возврат рабочих органов управления в исходное положение производится пружинами 11 и 7. Преимуществами пневматического управления являются простота конструкции и мягкость включения механизмов. Недостатки пневмосистем связаны с трудностями очистки воздуха от примесей и в первую очередь от влаги, а также с низким давлением воздуха 0,7...0,8 МПа, что увеличивает габариты пневмоагрегатов.
Электрические системы управления применяют преимущественно в машинах с электрическим и дизель-электрическим приводами. Управление электроприводом заключается в пуске и остановке электродвигателей, их реверсировании, изменении частоты вращения и обеспечении безопасности работы.
Электродвигатели мощностью до 15 кВт включают контроллерами или магнитными пускателями; более мощные двигатели включают обычно при помощи магнитных станций, контакторов, управляемых специальными командоаппаратами. При контроллерном и контакторном управлении можно в определенных пределах регулировать частоту вращения вала асинхронных электродвигателей.
Электрическая система отличается компактностью конструкции, надежностью действия и возможностью применения автоматики. Комбинированные системы управления представляют собой сочетание электрической системы с гидравлической или пневматической. Их достоинства — возможность применения дистанционного управления и сокращение длины масло- и воздухопроводов при сохранении преимуществ и недостатков систем, составляющих данную комбинированную систему.
В зависимости от характера воздействия машиниста на управляемые механизмы различают системы управления непосредственного действия и с усилителями (сервоприводы). К первым относятся механическая рычажная и гидравлическая безнасосная системы управления, ко второй — пневматическая, гидравлическая насосная, электрическая и комбинированная системы.
Контрольные вопросы.
1. Что такое привод машины? Из чего он состоит? Обоснуйте преимущественное применение строительных машин с автономными двигателями перед машинами, работающими от внешней энергетической сети. В каких производственных условиях для привода строительных машин используют энергию электро- и пневмосети? В каких случаях для привода малых машин применяют компрессоры? Какими основными показателями оценивают эффективность привода строительных машин?
2. Что такое силовая установка машины? Из чего она состоит? Приведите пример.
3. Перечислите виды механических трансмиссий. Какие трансмиссии передают движение с преобразованием энергии в другие формы, отличные от механической? Какие устройства обеспечивают эти преобразования? Приведите классификацию трансмиссий для привода нескольких рабочих органов или исполнительных механизмов. Какой вид привода имеет преимущественное ют передаточное отношение и коэффициент полезного действия для трансмиссии, составленной из последовательно соединенных передач?
4. Чем определяется сопротивление на ведомом звене трансмиссии? Какому условию должны удовлетворять активное усилие или момент на ведущем звене трансмиссии для возможности ее функционирования? Приведите пример. Изложите особенности расчетов движущего момента в передачах (трансмиссиях) вращения при переменной скорости движения. Что такое приведенные к ведущему звену момент на ведомом звене и моменты инерции звеньев передачи? Что такое коэффициент динамичности? В каких случаях допустимо не учитывать его в расчетах?
5. Перечислите виды механических передач. Какие из них относятся к передачам движения трением? зацеплением? Какие передачи имеют в своем составе гибкие связи?
6. Опишите устройство и принцип работы фрикционной передачи. Что такое упругое проскальзывание, на какие параметры передачи оно влияет? Как определяют передаточное отношение фрикционной передачи? коэффициент полезного действия передачи? При каком условии обеспечивается функционирование фрикционной передачи? Как определяют передаточное отношение конической фрикционной передачи? Для чего в фрикционных передачах применяют клинчатые катки? Что такое приведенный коэффициент трения? Для чего применяют вариаторы? Как определяют передаточное отношение вариатора?
7. Опишите устройство и принцип работы ременной передачи. Что такое угол обхвата? Какой функциональной зависимостью связаны между собой усилия в набегающей и сбегающей ветвях ременной передачи? Как определяют передаточное отношение ременной передачи? Чем отличается упругое скольжение от буксования? Какие виды ремней применяют в ременных передачах? Каковы области их применения? Какими преимуществами и недостатками обладают клиновые ремни (в т. ч. многорядные) по сравнению с плоскими? Каково оптимальное значение межосевого расстояния для плоскоременной передачи? Каковы минимальное и максимальное значения межосевого расстояния для клиноременной передачи? Для чего и какими способами осуществляют натяжение ременной передачи? Что такое приведенный коэффициент трения в клиноременной передаче? Какими преимуществами и недостатками обладают ременные передачи?
8. Опишите устройство и принцип работы зубчатой передачи. Как называют сопрягаемые колеса зубчатой передачи? Перечислите виды зубчатых колес и охарактеризуйте их устройство и области применения. Что такое передача внутреннего зацепления, чем она отличается от передачи внешнего зацепления? Какими основными факторами предопределено преимущественное применение зубчатых передач в трансмиссиях строительных машин?
9. Как определяют межосевое расстояние в цилиндрической зубчатой передаче? в конической передаче? Что такое делительная окружность? основная окружность? окружность вершин зубьев? окружность впадин? Что такое шаг и модуль зубьев? Как определяют диаметры делительных окружностей зацепляющихся колес в цилиндрической зубчатой паре? Чем ограничено число зубьев меньшего колеса? Как определяют межосевое расстояние цилиндрической зубчатой пары через модуль и числа зубьев колес? Что такое линия зацепления? полюс зацепления? угол зацепления? Каковы его значения для стандартных колес?
10. За счет чего косозубые передачи работают более плавно по сравнению с прямозубыми? Что такое окружной и нормальный шаг? окружной и нормальный модуль? Как они связаны между собой? Каковы преимущества и недостатки шевронных зубчатых колес по сравнению с косозубыми?
11. Какими параметрами характеризуется коническое зубчатое колесо? Как определяют передаточное число цилиндрической и конической зубчатых передач?
12. Опишите устройство и принцип работы червячной передачи. Как определяют диаметр делительного цилиндра червяка? Назовите виды червяков. Чем они характеризуются? Каковы их применение в строительных машинах? Обоснуйте ответ.
13. От чего зависит внешнее сопротивление на рабочем органе? Каков характер этого сопротивления? Приведите примеры. Что является источником динамического сопротивления? Как влияет на его формирование механическая характеристика привода? Как влияет динамическая составляющая на общее внешнее сопротивление? Какими показателями пользуются для характеристики режимов работы машин и их механизмов? Приведите классификацию режимов.
14. Что такое жесткость механической характеристики привода? Какие характеристики называют жесткими? мягкими? Что такое коэффициент перегрузочной способности привода?
15. Какую энергию преобразуют двигатели внутреннего сгорания в механическое движение? Какие типы двигателей внутреннего сгорания применяют в приводах строительных машин? На каких видах топлива они работают? Что такое рабочий цикл или рабочий процесс двигателя внутреннего сгорания? Что такое такт? Опишите рабочий цикл четырехтактного карбюраторного двигателя. Чем отличается от него рабочий цикл дизеля? Для чего в конструкциях двигателей внутреннего сгорания применяют несколько рабочих цилиндров? Каков порядок их работы? Каково назначение маховика в конструкции двигателя внутреннего сгорания?
16. Назовите способы запуска двигателей внутреннего сгорания. Какие для этого применяют устройства? Чем обусловлен затрудненный запуск двигателей внутреннего сгорания при низкой температуре окружающего воздуха? Какие устройства применяют для его облегчения?
17. Какими основными показателями характеризуют работу двигателей внутреннего сгорания? Что такое удельный расход топлива? эффективный КПД? Каковы значения этих величин для дизелей и карбюраторных двигателей?
18. Что такое механическая характеристика двигателя внутреннего сгорания? Из каких ветвей она состоит? Как получаются промежуточные скоростные характеристики? Назовите характерные точки внешней механической характеристики. Что такое коэффициент перегрузочной способности, каково его значение для дизелей? Какая ветвь механической характеристики двигателя внутреннего сгорания является рабочей? К какому виду по жесткости она относится? Как влияет характер изменения внешней нагрузки во времени на положение текущей точки на механической характеристике? Какие участки механической характеристики предпочтительны и почему?
19. Какие типы электрических двигателей применяют в приводах строительных машин? Назовите параметры электрической сети для питания двигателей переменного тока.
20. Какими преимуществами и недостатками обладают асинхронные двигатели? Приведите механическую характеристику асинхронного электродвигателя и опишите ее характерные точки. Что такое естественная и искусственная механические характеристики? Какой участок механической характеристики считается рабочим, к какому виду по жесткости он относится? Каковы значения коэффициента перегрузочной способности асинхронных двигателей? Что такое пусковой момент асинхронного двигателя? Каковы его значения для двигателей короткозамкнутых и с фазным ротором? Для чего в цепь ротора фазного двигателя включают дополнительные сопротивления? Какие механические характеристики им соответствуют? Опишите запуск электродвигателя с фазным ротором с использованием пусковых сопротивлений.
21. Для чего в приводах грузоподъемных машин применяют двухскоростные электродвигатели? Какие электродвигатели применяют в приводах ручных машин? Каковы их особенности?
22. Какие типы двигателей постоянного тока применяют в приводах строительных машин? Каковы их механические характеристики? Чем ограничено их применение?
23. Приведите краткие сведения из истории создания электрического привода.
24. Что такое трансмиссия? передача? Приведите примеры. Какими параметрами характеризуется передача? Как они связаны между собой? Что такое передаточное отношение, как его определяют при одинаковых формах движения на входном и выходном звеньях передачи? Что такое коэффициент полезного действия, какие сопротивления движению он учитывает? Какие преимущества и недостатки? Опишите устройство червячного колеса. Какими параметрами оно характеризуется? Как определяют межосевое расстояние червячной передачи? Что такое угол подъема винтовой линии червяка, как он влияет на работу передачи? Что такое многозаходный червяк, как определяют число заходов, чем отличается многозаходный червяк от однозаходного конструктивно и функционально? Что такое самотормозящийся червяк? Как определяют передаточное число червячной передачи? Какими достоинствами и недостатками обладают червячные передачи?
25. Опишите устройство и принцип работы цепной передачи. Какие типы приводных цепей применяют в цепных передачах? Каковы особенности их работы и области применения? Каким главным параметром характеризуются приводные цепи? Чем ограничено минимальное число зубьев звездочек? Как определяют диаметр делительной окружности звездочки? Каковы минимальные, максимальные и оптимальные значения межосевых расстояний в цепных передачах? Чем обусловлено непостоянство линейной скорости движения цепи? Как определяют передаточное число цепной передачи? Дайте сравнительную оценку цепных и ременных передач.
26. Для чего предназначены валы и оси? Чем они различаются? Как соединены с валами и осями посаженные на них колеса, шкивы и т. п.? Перечислите конструктивные формы валов. Приведите примеры их применения. Что такое цапфа? Перечислите виды цапф в зависимости от их назначения.
27. Для чего служат подшипники? Что такое подпятник? Перечислите типы подшипников по способу передачи нагрузок. Каковы их функциональные и конструктивные различия?
28. Опишите устройство и принцип работы подшипника скольжения. Из каких материалов изготовляют антифрикционные вкладыши? Для чего нужно смазывать подшипники? Какие виды смазок применяют для этого? Опишите смазочные устройства. Перечислите виды подпятников скольжения.
29. Как устроен подшипник качения? Приведите классификацию подшипников качения. Чем объясняется большая нагрузочная способность роликовых подшипников по сравнению с шариковыми? В каких случаях применяют игольчатые подшипники? игольчатые подшипники без внутренних колец? Каковы их достоинства и недостатки? Что такое самоустанавливающийся подшипник? Дайте сравнительную оценку подшипников качения и скольжения.
30. Для чего в трансмиссиях машин применяют муфты? Приведите их классификацию. Какие виды нерасцепляющихся муфт применяют в трансмиссиях строительных машин? Опишите устройство каждого вида, их достоинства, недостатки и особенности, определяющие области их применения.
31. Для чего служат сцепные муфты? Перечислите основные типы сцепных муфт. Перечислите типы фрикционных муфт. Как устроены дисковые, конические и пневмокамерные муфты? Опишите принцип их действия. Как устроены кулачковые и зубчатые муфты сцепления? Перечислите виды самоуправляемых сцепных муфт.
32. Для чего в строительных машинах применяют тормоза? Каковы их основные типы? Как устроены и как работают колодочные, ленточные и дисковые тормоза? Какие тормоза называют нормально замкнутыми и нормально разомкнутыми?
33. Для чего применяют редукторы? Перечислите виды наиболее распространенных схем редукторов. Чем отличаются специальные редукторы от универсальных? Опишите устройство цилиндрического редуктора. Как соединены зубчатые колеса с валами? Что такое вал-шестерня? Для чего в корпус редуктора заливают масло? Как проверяют его уровень? Каким способом предотвращают вытекание масла через зазоры между валами и крышками? Для чего предназначен обратный клапан в корпусе редуктора? Как сливают отработавшее масло?
34. В чем заключается сущность управления машиной? Приведите классификацию систем управления строительными машинами.
35. Изложите структуру управления в арготической системе. Приведите примеры устройства и принципа работы рычажно-механических, рычажно-гидравлических систем управления, систем с пневмо- и гидроусилителями. В каких случаях для управления машинами используют системы с электрическими, электронными и электромагнитными усилителями? Для чего применяют следящие системы управления? Изложите принцип их действия.
36. Каков состав гидравлического привода? Для чего в его составе предназначена механическая передача? Что такое гидропередача? Перечислите ее составные элементы. Каково их назначение? Каков порядок преобразования энергии в гидропередачах?
37. Перечислите типы насосов, применяемых в гидроприводах строительных машин. Как они устроены и как работают? Что означает обратимость насоса? Перечислите основные параметры насосов и гидромоторов, дайте им определение и приведите основные зависимости между ними.
38. Как устроен и как работает гидроцилиндр? Какие типы гидроцилиндров применяют в гидроприводах строительных машин? Как определяют усилие на штоке гидроцилиндра?
39. Какие типы и виды гидравлических аппаратов применяют в гидроприводах строительных машин? Охарактеризуйте их назначение, устройство и принцип работы.
40. Для чего служат кондиционеры рабочей жидкости, какие устройства они включают? Охарактеризуйте их назначение, особенности устройства и принципа работы.
41. Для чего предназначены гидролинии? Как их классифицируют по функциональному признаку? Для чего предназначены жесткие и гибкие участки гидролиний?
42. Изложите требования, предъявляемые к рабочим жидкостям гидропередач. Какие виды присадок применяют в рабочих жидкостях? Назовите марки масел, применяемых в качестве рабочих жидкостей. Для каких условий их используют?
43. Изложите принцип действия гидромуфты и гидротрансформатора. Для чего используют эти устройства в приводах строительных машин? Что такое коэффициент трансформации? Как изменяется КПД гидротрансформатора в функции угловой скорости турбинного колеса? Какая точка на механической характеристике гидротрансформатора является оптимальной? Для чего реакторное колесо устанавливают на обгонной муфте?
44. В каких строительных машинах используют пневмопривод? Перечислите его преимущества и недостатки. Из каких составных частей состоит пневматическая передача?
45. Для чего предназначены компрессоры? Что входит в состав компрессорной станции? Приведите классификацию компрессорных станций по способу их передвижения. Перечислите типы компрессоров. Изложите принцип работы поршневого компрессора одноступенчатого сжатия. Что такое компрессор многоступенчатого сжатия? Для чего предназначены воздухосборники?
46. Какие аппараты включает система воздухоподготовки? Как они взаимосвязаны? Изложите принцип работы системы.
47. Какие виды пневмодвигателей, распределительных и регулирующих аппаратов применяют в пневмопередачах?
Тема 3 " Технические средства автоматики и основы автоматического регулирования Общие сведения о строительных машинах" (2 часа)
Урок №6
Стр.
3.1 Общие сведения и понятия.
3.2 Автоматический контроль, регулирования и управления
3.3 Технические средства автоматизации.
3.4 Агрекатированный комплекс аппаратуры (АКА) для строительных машин.
3.5 Контрольные вопросы.
3.1 Общие сведенья и понятия.
Требования предъявляемые к машинам, механизмам, устройствам, технологическому оборудованию, с каждым годом возрастают и могут быть удовлетворены только при достаточном оснащении средствами автоматизации, позволяющими освободить человека от монотонного и непосредственного управления техническим процессом. Все машины, оборудование, технологические процессы, функционирующие без непосредственного участия человека, действуют в соответствии с определенной программой, в которой должен содержаться алгоритм — предписание о последовательности выполнения операций и их характере. Наиболее совершенные системы способны корректировать (направлять и дополнять) программу в соответствии с внешними и внутренними условиями для наиболее точного выполнения алгоритма. Чем лучше составлена программа и чем лучше технические средства ее осуществления, тем точнее выполнение алгоритма функционирования системы и тем меньше человек вмешивается в управление (целенаправленное изменение технологического процесса с целью получения наилучшего производственного эффекта).
При автоматизированной системе человек воздействует на технический процесс через автомат. В достаточно совершенных системах функции человека сводятся к наблюдению за поведением автоматических устройств, в менее совершенных человек должен вмешиваться в технический процесс путем корректировки программы при ее реализации. При управлении строительными и коммунальными машинами решаются разнообразные задачи поведения их рабочих органов, например стабилизация рабочего органа в некотором определенном положении, перемещение рабочего органа по определенной траектории, остановка рабочего органа при отклонении параметров производственного процесса от установленной нормы. Следует различать понятия «автоматика» и «автоматизация». Автоматика — это наука о принципах и методах построения систем, выполняющих заданные функции без непосредственного участия человека. Автоматизация — это применение методов и средств автоматики для превращения неавтоматических (обязательно оснащенных исполнительными механизмами) процессов в автоматические. Автоматическая работа отдельных машин и агрегатов, соблюдение режимов технологических процессов без участия человека обеспечиваются приборами и устройствами, выполняющими следующие функции:
- получение информации о состоянии процессов, механизмов и агрегатов (чувствительные элементы, датчики);
- формирование удобного вида информации: по физической сущности, объему и форме (вторичные приборы измерительных систем, усилители);
- использование информации для обеспечения воздействия на машину, агрегат, технологический процесс (исполнительные устройства);
- передачу информации на расстояние (применение телемеханики). Автоматизация производства и работ строительных машин развивается в следующих основных направлениях.
Автоматический контроль - это контроль с помощью датчиков и преобразователей различных параметров и характеристик управляемого объекта или процесса с целью анализа качества его структуры и функционирования.
Процесс автоматического контроля состоит из двух основных этапов: 1)восприятие информации о состоянии объекта и внешних условиях и преобразование ее к виду, удобному ддя последующей обработки; 2) обнаружение в поступающей информации признаков контролируемого события, т. е. тех специфических особенностей, которые отличают данное событие от всех других, и формирование сигнала о поступлении этого события.
Автоматическое управление - это осуществление совокупности воздействий, направленных на поддержание или улучшение функционирования управляемого объекта или процесса в соответствии с заданным алгоритмом управления. Такое управление осуществляется системой автоматического управления (САУ), которая представляет собой один или несколько объектов управления и устройств измерения, управления и защиты, где обработка информации, формирование команд и их преобразование в воздействие на управляемый объект осуществляются без участия технического оператора.
Автоматическое регулирование - это поддержание постоянной или изменение по заданному закону некоторой выходной величины, характеризующей процесс. Устройство, обеспечивающее такое регулирование, называют системой автоматического регулирования (САР).
Различают следующие системы автоматического регулирования: стабилизирующая — поддерживает значение управляемой величины постоянным (например, система автоматической стабилизации толщины срезаемой стружки грунта путем регулирования скорости напорного механизма одноковшового экскаватора);
Логико-программная, которая изменяет состояние управляемого объекта в соответствии с требуемой последовательностью рабочих операций по заданной программе (например, автоматизация поточно-транспортных систем, состоящих из ряда ленточных или винтовых конвейеров);
Следящая система, у которой алгоритм функционирования содержит предписание изменять управляемую выходную величину в зависимости от изменения заранее обусловленной известной величины на входе (универсальные следящие системы контроля строительных машин в пространстве по копиру или лазерному лучу);
Самонастраивающаяся (адаптивная) система путем автоматического поиска определяет такое значение регулируемой величины, которое обеспечивает наивыгоднейший режим работы регулируемого объекта. Автоматические устройства, устанавливаемые на машинах (табл. 3.1), позволяют при выполнении функций управления стабилизировать положение рабочего органа в пространстве или перемещение его по заданной программе, обеспечивать максимальную производительность машины и движение ее по заданному курсу, защищать от перегрузок различные узлы, обеспечивать охрану труда машиниста, контролировать работу отдельных узлов и вести учет производительности машин.
Различают три вида процесса по объему автоматизации:
Частичная автоматизация процесса или машины, характерная для любого машинного производства, заключающаяся в том, что автоматизированы один или несколько участков (если это машина, то отдельные исполнительные ее органы) производственного процесса, между собой не связанных;
Комплексная автоматизация представляет собой единую взаимосвязанную систему производственных операций, которая достигается при объединенном программном управлении, связывающем все машины или отдельные исполнительные органы машины в единый комплекс (поточную линию);
Полная автоматизация обеспечивает управление (без участия человека) всеми основными и вспомогательными участками производства, включая выбор и установление режимов управления. При комплексной автоматизации большое распространение получают роботы и различные манипуляторы.
Робот — это машина с антропоморфными (человекоподобными) действиями, предназначенная для автоматизации ручного физически тяжелого, вредного и монотонного труда, а также доя выполнения работ в недоступных, труднодоступных или не безопасных для людей местах. Роботы второго поколения могут не только выполнять простейшие операции, но также распознавать и анализировать возникающие в процессе работы сложные производственные ситуации и выполнять эффективные действия в конкретных, заранее предусмотренных обстоятельствах.
Манипулятор — это механизм, осуществляющий под управлением оператора действия, аналогичные действиям руки человека. Современные промышленные роботы представляют собой автоматические программно-управляемые манипуляторы, выполняющие рабочие операции со сложным пространственным перемещением на основе восприятия различной информации о внешней среде. Управление и связь между отдельными подсистемами такого робота осуществляются при помощи многоуровневого взаимодействия с помощью управляющих ЭВМ, главной частью которых является микропроцессор. Для управления механической рукой используют телевизионные устройства (система «глаз — рука» — техническое зрение), различные микрофоны (система «уши — рука» — технический слух) и т. д. Степень автоматизации технологических процессов в строительстве характеризуется долей участия человека в управлении производственным процессом или оборудованием. Она оценивается коэффициентом автоматизации.
|
|
|
|
|
Дата добавления: 2014-01-11; Просмотров: 2671; Нарушение авторских прав?; Мы поможем в написании вашей работы!