КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Достоинства и недостатки. 7 страница
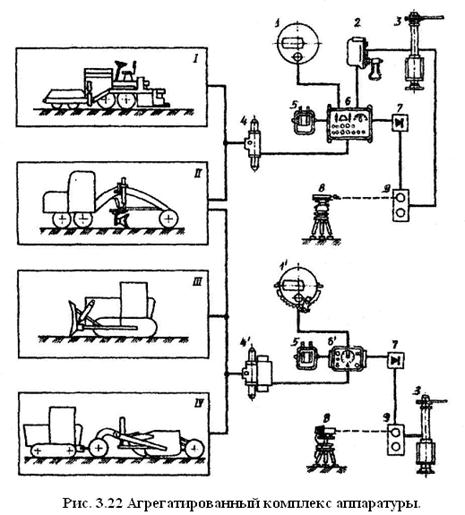
Схема агрегатированного комплекта аппаратуры «АКА-Дормаш»
(Рис. 3.22) Комплект аппаратуры позволяет применять автономные системы управления, у которых контроль положения рабочего органа осуществляется с помощью маятникового датчика, установленного на борту машины; копирные системы с контролем положения по внешнему копиру (проволоке, бордюру, голосу, лыже и др.); комбинированные системы, в которых для контроля углового положения служит автономный датчик, а для определения положения по высоте используют копир.
Все эти системы для машин разного назначения строят на базе и пух разновидностей маятниковых (автономных) датчиков 1 и 1 (отличающихся один от другого типом установочного приспособления с разрешающей способностью преобразователя), щупового (копирного) датчика 2, подъемного устройства 3, двух разновидностей элекгрогидрозолотников 4 и 4' (причем золотник 4 является составным элементом золотника 4'), унифицированных пультов 5 дистанционного управления и вспомогательных блоков 6 и 6'. Более сложные комплексные системы составляют, добавляя к простейшим комплектам аппаратуры дополнительные приборы или блоки. На рисунке показано также перспективное унифицированное согласующее устройство 7 к выпускаемым в настоящее время комплектам.аппаратуры, в которых вместо щупового или маятникового датчика может быть подключен фотоэлектрический приемник 9 для управления машинами по лучу лазерного излучателя 8.
Агрегатированные комплекты позволяют развивать аппаратуру и системы автоматики с максимальной унификацией их элементов. Системы автоматического управления положением рабочего органа дорожностроительных, аэродромных и мелиоративных машин разделяют на одно-, двух- и трехканальные. Одноканальные системы управления удерживают рабочий орган машины в заданном положении в одной плоскости: поперечной у автофейдеров, продольной у скреперов и бульдозеров. Такими системами являются «Профиль-1» и «Профиль-10» для легких и средних автогрейдеров, «Стабилоплан-1», «Стабилоплан-10», «Копир-Стабилоплан» для скреперов, «Автоплан-1» и «Копир-Автоплан-10» для бульдозеров. Двухканальные системы управления обеспечивают обычно стабилизацию положения рабочего органа одновременно в продольной и поперечной плоскостях. К числу таких систем относятся «Профиль-2» и «Профиль-20» для тяжелых и средних автогрейдеров, «Стабилослой-1» и «Стабилослой-10» для укладчиков покрытий, «Ком-биплан» для бульдозеров. Трехканальные системы содержат обычно помимо каналов управления положением рабочего органа в двух ортогональных вертикальных плоскостях канал управления движением машины в плане — «по курсу». Такие системы управления «Профиломат-1» и «Профиломат-2» > используют на профилировщиках основания и укладчиках покрытий, входящих в комплект машин типа ДС-110 для скоростного строительства магистральных дорог и взлетно-посадочных полос.
3.5 Контрольные вопросы.
1. Что такое автоматизация строительных машин? Изложите существо автоматического управления строительными машинами. Какими факторами обусловлено применение для этого систем автоматики? Что такое автоматический контроль? автоматическое регулирование?
2. Приведите классификацию автоматических систем по алгоритму управления и назначению. Охарактеризуйте эти системы. Приведите примеры их использования.
3. Для чего применяют датчики? Какова структура датчика, что такое чувствительный элемент? Что такое входная и выходная величины? Приведите классификацию датчиков по назначению. Что такое чувствительность датчика? Чем отличаются линейные датчики от нелинейных? Что такое инерционность датчика, порог чувствительности, предел преобразования, динамический диапазон?
4. Для чего предназначены, как устроены и как работают датчики перемещения (положения), углового положения, силового воздействия, контроля и регулирования температуры, расхода и уровня, угловой скорости, линейных ускорений?
5. Для чего применяют усилители? Что такое коэффициент усиления? Приведите классификацию усилителей по виду усиливаемого сигнала и по принципу действия.
6. Перечислите типы электромагнитных реле. Как устроено и как работает нейтральное реле постоянного тока? Как их классифицируют по времени срабатывания?
7. Что такое геркон, для чего он предназначен, как устроен, каков принцип его работы и каковы основные параметры?
8. Для чего предназначены, как устроены и как работают электронные
ламповые усилители (на примере трехэлектронной лампы)?
9. Для чего применяют счетчики импульсов?
10. Для чего в автоматических системах применяют микропроцессоры?
Тема 4 "Ходовое оборудование строительных машин" (4 часа)
Урок №7
Стр.
4.1 Назначение, структура, виды ходового оборудования, основные
характеристики.
4.2 Гусеничное ходовое оборудование.
4.2.1 Виды гусеничного хода.
4.2.2 Многоопорный гусеничный движетель.
4.2.3 Малоопорный гусеничный движетель.
4.2.4 Мягкий, жесткий и балансирный гесеничный движетель.
4.3. Шиноколесное ходовое оборудование.
4.3.1 Общие сведения.
4.3.2 Типы шин.
4.3.3 Устройство ведущего моста
4.4 Рельсовоколесное ходовое оборудование
4.5 Контрольные вопросы.
Урок №8
Практическое занятие (отчет №2).
4.1 Назначение, структура, виды ходового
оборудования, основные характеристики.
Ходовое оборудование предназначено для передачи нагрузок на опорное основание и для передвижения машин. Оно может быть активным и пассивным. Активным ходом оборудуют самоходные машины, а пассивным - машины, перемещаемые на буксире за тягачом, в качестве которого может быть использована любая самоходная машина. Ниже будут описаны активные ходовые устройства. Ходовое оборудование включает взаимодействующий с опорным основанием движитель, подвеску и опорную раму или оси, а в самоходных машинах, кроме того, механизм передвижения. По типу движителя ходовое оборудование подразделяют на гусеничное, шинноколесное. Рельсоколесное, шагающее, плавающие, на воздушной подушке.
Гусеничное ходовое оборудование применяют для передвижения по бездорожью, а также в машинах, для которых передвижение не является основной операцией, как, например, в одноковшовых экскаваторах, где оно используется, в основном, для передачи нагрузок, включая рабочие, на опорное основание и для передвижения экскаватора на новую рабочую позицию в пределах одной и той же рабочей площадки. Для передвижения таких машин на большие расстояния обычно используют тягачи со специальными прицепами-трайлерами.
Шинноколесное ходовое оборудование устанавливают на машинах, для которых транспортная операция занимает по времени соизмеримую с другими операциями часть технологического цикла, как, например, у самоходных скреперов, перемещающих грунт в своем ковше на расстояния нескольких километров. Такой же вид ходового оборудования имеют машины, часто меняющие рабочие площадки, отстоящие одна от другой на значительных расстояниях. Особенностью такого вида ходового оборудования являются повышенные-транспортные скорости, соизмеримые со скоростями грузовых автомобилей.
Рельсоколесным ходом оборудуют машины, работающие в ограниченной зоне с идентичными транспортными траекториями, например, башенные краны, некоторые виды карьерных экскаваторов непрерывного действия и др. Всякое изменение размеров рабочей зоны этих машин связано с перекладкой путей и обосновано только в случае небольших затрат на эти работы.
К специальным ходовым устройствам относятся шагающие, вездеходные и др. Гусеничные движители (гусеницы) монтируют на раме, называемой также нижней рамой, в отличие от верхней рамы, входящей в остов машины. Шинноколесные движители (ходовые колеса) устанавливают обычно на мостах. Рельсоколесные движители в виде металлических колес закрепляют на осях нижней рамы, или объединяют по несколько колес балансирами, шарнирно соединенными с нижней рамой посредством вертикально установленных шкворней. Нижние рамы (оси) соединяют с верхними рамами машины с помощью подвесок, которые бывают жесткими, полужесткими и мягкими. Соединение по жесткой схеме - на болтах и на пальцах, по мягкой схеме - с помощью пружин и рессор, в случае полужесткой схемы (рис. 3.1) одну часть нижней рамы соединяют с верхней рамой по жесткой, а вторую - по мягкой схеме. При движении мягкая подвеска способствует снижению динамических нагрузок от неровностей дороги. Для этих же целей в состав мягких подвесок вводят гидравлические, работающие по принципу гидравлического дросселя, или гидропневматические амортизаторы.
Основными технико-эксплуатационными показателями ходового оборудования являются: скорость передвижения, проходимость - способность передвигаться в различных эксплуатационных условиях, прежде всего, по рыхлым или переувлажненным грунтам и маневренность - способность изменять направление движения в стесненных условиях.
Проходимость машины при прочих равных условиях определяется глубиной колеи, образуемой в результате взаимодействия ходового оборудования с грунтом, дорожным просветом (клиренсом) -расстоянием от наиболее низкой части машины (кроме движителя) до опорной поверхности и сцепными качествами ходового оборудования. Глубина колеи h (м) увеличивается с ростом давления р (МПа) на контактной поверхности между опорной частью ходового оборудования и грунтом. Эти величины связаны между собой примерно пропорциональной зависимостью: h = p/c,
где с - коэффициент постели, значения которого колеблются в широких пределах - от 0,1 - 0,5 МПа/м для свеженасыпанного песка и мокрой размягченной глины до 20 - 100 МПа/м для мягких скальных грунтов, известняков, песчаников, мерзлоты.
Обычно удельные давления распределяются по контактной поверхности неравномерно. Различают среднее и максимальное удельное давление. Под средним удельным давлением понимают такое давление, которое имело бы место при равномерном распределении давлений по всей контактной поверхности, Его определяют как отношение нормальной к контактной поверхности нагрузки к площади этой поверхности. Максимальные удельные давления, хотя и действуют в отдельных точках контактной поверхности, определяют ту деформацию грунта, а следовательно, и глубину колеи, которая образуется в результате передвижения машины. Именно этот показатель определяет проходимость машины.
Более высокой проходимостью обладает гусеничное ходовое оборудование, имеющее развитую опорную поверхность движителя, обеспечивающую удовлетворяющие условиям эксплуатации удельные давления на грунт и меньшую, чем у шинноколесных машин его осадку. Гусеничные движители не теряют своей транспортной способности даже при погружении в грунт до половины своей высоты. В то же время они уступают шинноколесным по скорости передвижения, которая для большинства гусеничных машин не превышает 10км/ч. Для рельсоколесных машин понятие проходимости теряет смысл, поскольку эти машины передвигаются по стальным рельсам, уложенным на подготовленное основание с соблюдением нормированных уклонов. Маневренность характеризуется радиусом разворота R и шириной дорожного коридора Вда В зависимости от вида привода гусеничные машины могут разворачиваться относительно одной заторможенной гусеницы (рис. 4.1, а) (при групповом приводе) и относительно собственной оси (рис. 4.1, б) (при индивидуальном приводе включением гусениц на движение во взаимно 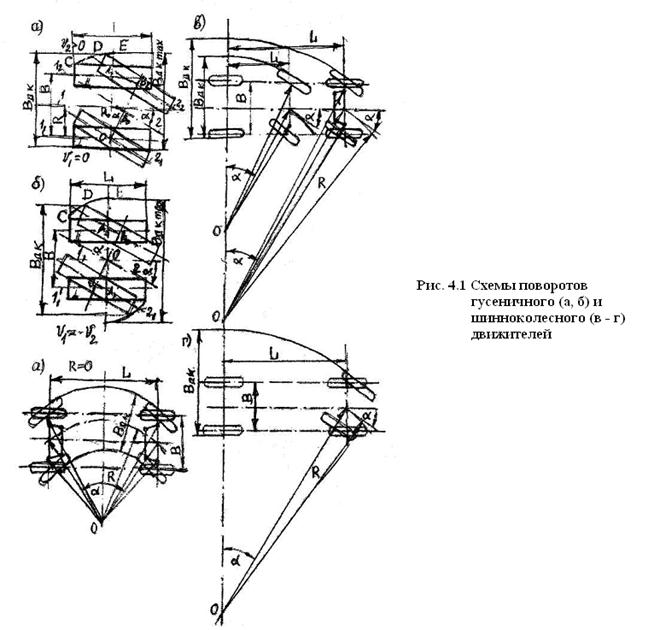 противоположных направлениях).
противоположных направлениях).
В первом случае радиус поворота, определяемый как радиус дуги АоВо (рис.4,1, а), описываемой центром опорного контура гусеничного движителя, постоянен, равен половине колеи В, а во втором случае (рис. 4.1, б) он равен нулю. При повороте на угол а относительно одной заторможенной гусеницы I (рис. 4.1, а) центр опорного контура перемещается по траектории 1 - АоВа - 2. При этом траектория центра гусеницы I представляется ломаной линией 11 - О - 2, без плавного перехода, а траектория центра забегающей гусеницы II -прямыми 12 и 22, сопряженными дугой окружности AiBi. При повороте относительно собственной оси (рис.4.1, б) центр опорного контура движется по ломаной 1-2 без плавного перехода, центр забегающей гусеницы II - с плавным переходом по дуге А2В2, а центр отстающей гусеницы 1 -по траектории 1, - ABi -2i, с возвратным движением на дуге Ai Bj.
Для шинноколесных машин радиус поворота R определяется как радиус дуги окружности средней точки оси управляемых колес (рис. 4.1, в, д) или колес с управляемой осью (рис. 4.1, г). I Он зависит от угла поворота а: чем больше этот угол, тем меньше радиус R. С уменьшением базы машины L1 (расстояния между осями задних и передних колес), уменьшается также радиус | поворота. Поэтому для работы в стесненных условиях обычно применяют короткобазовые пневмоколесные движители. Меньшие радиусы поворота имеют также двухосные колесные движители со всеми управляемыми колесами (рис. 4.1,д). Гусеничные машины более маневренны по сравнению с шинноколесны-ми, выполненными по описанным выше схемам, в связи с тем, что они имеют меньшие радиусы поворота.
Ширина дорожного коридора есть ширина следа разворачивающейся машины. Этим параметром определяется вписываемость машины в ситуационную схему трассы передвижения. Ширина дорожного коридора как для гусеничных, так и для шинноколесных движителей зависит i от угла поворота. Для гусеничного движителя ее максимальное значение Вда тах достигается при таком угле поворота а, когда наиболее удаленная от полюса вращения задняя точка С (см. рис. 4.1 а, б) забегающей гусеницы займет положение Е на поперечной оси исходного (предшествующего | повороту) положения гусениц. При дальнейшем увеличении угла поворота значение Вда max I остается неизменным. При повороте относительно собственной оси это значение больше, чем в случае поворота относительно одной заторможенной гусеницы. Для шинноколесных машин значение Вдют соответствует наибольшему углу поворота. При равной колее наименьшую ширину дорожного коридора имеют двухосные шинноколесные движители со всеми управляемыми колесами (рис. 4.1)
Клиренс — это расстояние от поверхности дороги до наиболее низкой точки ходового оборудования. Следует иметь в виду, что рабочее оборудование строительных и коммунальных машин уменьшает клиренс по сравнению с базовой машиной. В связи с этим, например, для уборочных машин рассматриваются две величины клиренса: 1) расстояние до жестких деталей 300 I мм; 2) расстояние до эластичных деталей (резиновый фартук, ворс щетки и т. п.), не превышающее 100мм.
4.2.1 Виды гусеничного хода.
Гусеничный двигатель состоит из замкнутой гусеничной цепи, которая приводится в движение ведущей звездочкой; она предохраняется от провисания поддерживающими катками и колесом. Нижняя ветвь гусеницы прижимается к грунту опорными катками. Гусеница состоит из звеньев, шарнирно соединенных пальцами. На звеньях обычно имеются шпоры для лучшего сцепления с грунтом.
Различают гусеницы с малым шагом звеньев t, у которых b: t>2,5, и с большим шагом b: t<2,5, где b - ширина звена. При большом шаге звеньев давление на грунт передается более равномерно, чем при малом шаге, но гусеницы с большим шагом не дают возможности получить большую скорость перемещения.
Достоинства: высокая проходимость, устойчивость, большая сила тяги, чем колесные, поэтому тяговое усилие гусеничных машин обеспечивает преодоление подъемов до 50%. Величина угла преодолеваемого подъема зависит от мощности и веса машины и положения центра тяжести. Коэффициент сцепления с грунтом при наличии шпор равен 1 (иногда 1,2) и сравнительно мало изменяется при увлажнении поверхности грунта. Недостатки: низкий КПД (0,65-0,75), большие потери на самопередвижении, большой вес (до 40% общего веса машины), сложность конструкции, быстрый износ деталей (1500-2000ч работы), малая скорость перемещения (16-10км/ч), необходимость перевозки тягачами на специальных прицепах-тяжеловозах при транспортировании даже на небольшие расстояния.
4.2.2 Многоопорный гусеничный движитель.
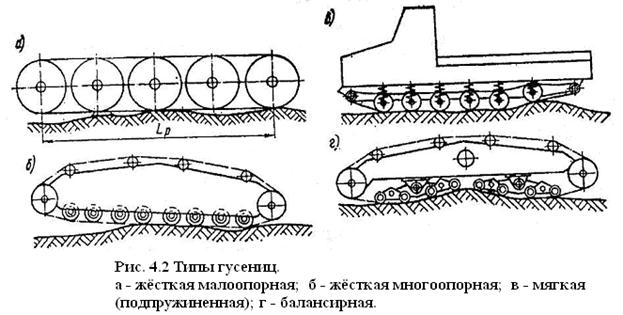
Многоопорные гусеницы (рис.4.2, б); обеспечивают большую плавность передвижения и улучшают проходимость машины по слабым грунтам. Погружение гусениц по всей длине одинокого, а следовательно, и удельное давление под гусеницей постоянно и определяется отношением нагрузки, приходящейся на гусеницу, к площади опорной поверхности:
p=Pi/b*L
где Рi - нагрузка, приходящаяся на гусеницу; b - ширина гусеницы; L -опорная длина гусеницы.
К многоопорным гусеницам относятся такие гусеницы, у которых отношение шага опорных катков tk к шагу гусеничных звеньев tr меньше двух.
4.2.3 Малоопорный гусеничный движитель.
Малоопорные гусеницы (рис. 4.2, а.) не обеспечивают плавности движения и создают условия для возникновения дополнительных пульсирующих напряжений в опорно-ходовых элементах гусеничного хода, что ухудшает проходимость машины на слабых грунтах. Однако малоопорные гусеницы можно выполнить достаточно прочными (без значительного увеличения массы), выдерживающими большие нагрузки (до половины массы машины на опорный каток), что позволяет машине передвигаться и работать на скалистых или мерзлых грунтах. К малоопорным гусеницам относятся такие гусеницы, у которых отношение шага опорных катков %, к шагу гусеничных звеньев tr больше двух.
4.2.4 Мягкий, жесткий и балансирный гусеничный движитель.
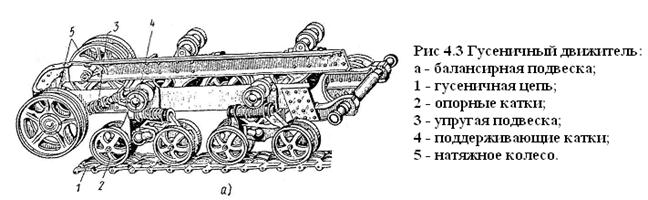
По приспособляемости к неровностям грунта различают жесткие, мягкие и балансирные гусеницы (рис 4.2 в,г.). В жестких гусеницах оси опорных катков жестко заделаны в гусеничных рамах. Такие гусеницы при передвижении по неровностям крайне неравномерно распределяют нагрузки на опорно-ходовые элементы. При мягкой подвеске опорные катки соединяются с корпусом машины через пружины, рессоры и др. При работе машины во избежание опрокидывания упругие подвески выключаются. Машины с мягкой или балансирной подвеской опорных катков преодолевают неровности плавно при равномерном распределении нагрузки между опорными точками, (рис. 4.3,а).
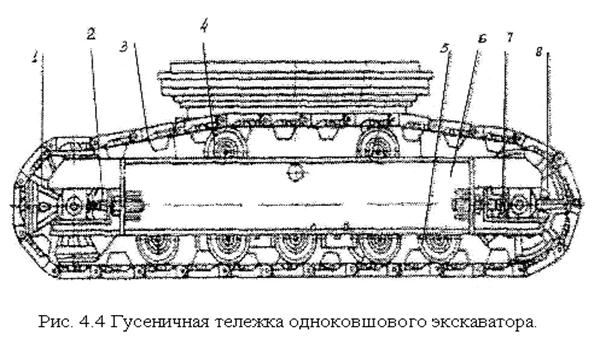
В строительных машинах массой до 1000 т применяют, в основном, двухгусеничные движители, каждая гусеница которых состоит из ходовой рамы 6 (рис. 4.4) замкнутой гусеничной ленты 3, огибающей ведущее 1 и направляющее 8 колеса, опорных 5 и поддерживающих 4 катков.
Различают гусеницы гребневого и цевочного зацеплений. У первых гусеничные ленты состоят обычно из литых звеньев, шарнирно соединенных между собой пальцами. С внутренней стороны лента имеет гребни, чередующиеся с впадинами, а с наружной - развитую в ширину гладкую поверхность, которой гусеница взаимодействует с } опорным основанием. По периферии ведущего колеса имеются кулачки, входящие во впадины внутренней поверхности гусеничной ленты.
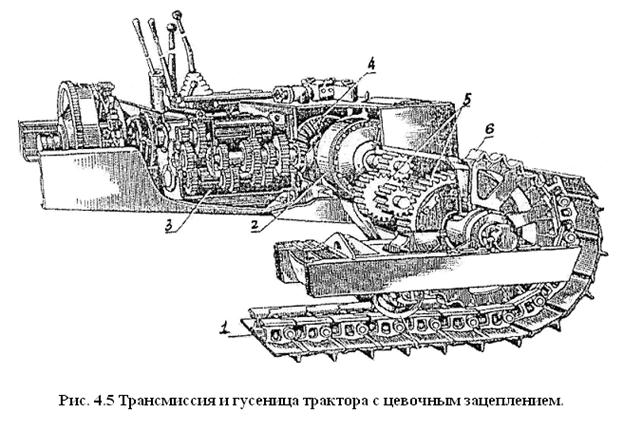
В случае цевочного зацепления (рис. 4.5) гусеничная лента 1 состоит из соединенных пальцами с втулками литых звеньев гусеничной цепи, к которым с наружной стороны болтами с гайками прикреплены башмаки с ребрами (грунтозацепами) из стального проката. Ведущее колесо - звездочка 6 входит своими зубьями в промежутки между втулками гусеничной цепи. Такой движитель позволяет двигаться с большими скоростями.
Благодаря наличию грунтозацепов гусеницы с цевочным зацеплением обладают лучшим сцеплением с податливым, например, грунтовым основанием, не утрачивают способности передвигаться при поломке отдельных башмаков, но имеют большую массу по сравнению с гусеницами гребневого зацепления. В последнее время цевочное зацепление тракторного типа находит все большее применение в гусеничном ходовом оборудовании строительных машин.
 Направляющее колесо обычно выполняют как натяжное. Его устанавливают на оси закрепленной в ползуне, перемещаемом во время натяжения в направляющих ходовой рамы винтом 7 (см. рис. 4.4) или гидроцилиндром. Устанавливаемое на некоторых гусеничных машинах например, на канатных одноковшовых экскаваторах, натяжные устройства 2 используют для натяжения приводных цепей ведущих звездочек оси опорных катков, обычно двухребордных для предотвращения бокового соскальзывания с них гусеничной ленты закрепляют на ходовой раме непосредственно или через балансиры с пружинами (рис. 4.3,а). Гусеницы с непосредственным креплением опорных катков к ходовой раме, называемые жесткими, наиболее просты, они обеспечивают более равномерное давление на грунт, но не амортизируют колебаний при езде по неровному жесткому основанию, из-за чего их транспортные скорости не превышают 5км/ч. Гусеницы с балансирной подвеской опорных катков и пружинами в их подвеске, называемые мягкими лучше приспосабливаются к неровностям дороги и позволяют двигаться машинам с большими скоростями. Поддерживающие катки, также двухребордные, служат для поддержания верхней ветви гусеничной ленты. Полужесткий гусеничный движетель представлен на рис 4.3,б.
Направляющее колесо обычно выполняют как натяжное. Его устанавливают на оси закрепленной в ползуне, перемещаемом во время натяжения в направляющих ходовой рамы винтом 7 (см. рис. 4.4) или гидроцилиндром. Устанавливаемое на некоторых гусеничных машинах например, на канатных одноковшовых экскаваторах, натяжные устройства 2 используют для натяжения приводных цепей ведущих звездочек оси опорных катков, обычно двухребордных для предотвращения бокового соскальзывания с них гусеничной ленты закрепляют на ходовой раме непосредственно или через балансиры с пружинами (рис. 4.3,а). Гусеницы с непосредственным креплением опорных катков к ходовой раме, называемые жесткими, наиболее просты, они обеспечивают более равномерное давление на грунт, но не амортизируют колебаний при езде по неровному жесткому основанию, из-за чего их транспортные скорости не превышают 5км/ч. Гусеницы с балансирной подвеской опорных катков и пружинами в их подвеске, называемые мягкими лучше приспосабливаются к неровностям дороги и позволяют двигаться машинам с большими скоростями. Поддерживающие катки, также двухребордные, служат для поддержания верхней ветви гусеничной ленты. Полужесткий гусеничный движетель представлен на рис 4.3,б.
Для повышения сцепления гусеничного движителя с фунтом при работе машин в зимних условиях или на грунтах с низкой несущей способностью на гладкие звенья гусеничной ленты устанавливают шипы или шпоры. В последние годы для работы на заболоченных грунтах ее слабой несущей способностью применяют резинометаллические гусеницы с развитой опорной поверхностью. Гусеничное ходовое оборудование приводится в движение от ДВС через механическую, гидравлическую или электрическую трансмиссии. В случае механической трансмиссии реализуется схема группового привода, в остальных случаях - схема индивидуального привода. В качестве примера группового привода на рис.4.5 представлена трансмиссия гусеничного трактора, состоящая из коробки передач 5, главной конической передачи 4, двух (с каждой стороны от главной передачи) бортовых фрикционов (многодисковых фрикционных муфт) 2, двух бортовых редукторов 5 и двух ведущих колес 6.
4.3 Шиноколесное ходовое оборудование.
4.3.1 Общие сведенья.
Колесный ход на пневмоколесных шинах широко применяется для путевых, дорожных и универсальных строительных машин. Масса пневмоколесного хода значительно меньше гусеничного, а скорость передвижения больше (до 60 км/ч). К недостаткам относится большое удельное давление на грунт в связи с малой площадью контакта колес с грунтом, и меньший коэффициент сцепления колес с грунтом. Угол подъема местности не превышает 12-14° (25%). Для повышения сцепления колес с грунтом на колеса надеваются специальные цепи. Несмотря на недостатки, колесный ход получает все большее применение. Этому способствует повышение транспортабельности машин, возможность их движения по дорогам с покрытием, увеличение проходимости машин на шинах низкого давления при приводе всех осей, что значительно увеличивает сцепной вес машины, а следовательно, и ее проходимость. Применение пневмоколесного хода ограничено допустимой нагрузкой на колесо. Пневмоколесный ход состоит из колес с пневманическими шинами, трансмиссии, ведущих мостов, подвесок и рулевого управления. В шинноколесном движителе различают приводные и управляемые колеса. Первые приводятся от ходовой трансмиссии, а вторыми управляют при изменении направления движения машины. Управляемые колеса могут быть одновременно и приводными. Для поворота машины используют как управляемые колеса, поворачиваемые относительно поворотных цапф, так и колеса с управляемой осью, поворачиваемой в плане относительно вертикального шкворня в ее средней части. В случае управляемых колес они приводятся от рулевой трапеции звеньев которой подобраны так, чтобы обеспечить поворот колес с разными углами без бокового скольжения при передвижении на поворотах: больший угол для колеса, движущегося по внутренней концентрической окружности поворота, меньший - для колеса, движущегося по внешней окружности.
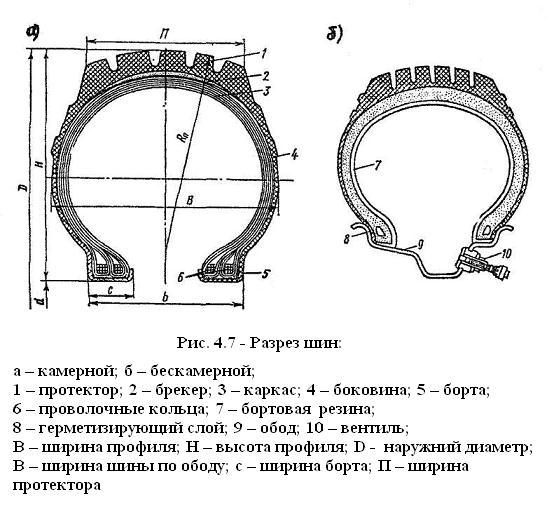
Шинноколесное ходовое оборудование может быть двухосным с одной или двумя ведущими осями, трехосным с двумя или тремя ведущими осями, четырехосным и j. д. Эту структуру обозначают колесной формулой вида А)(В. Первой цифрой обозначают общее число колес (колесо из двух шин считается за одно колесо), а второй-число приводных колес. Наиболее распространены машины с колесными формулами 4x2 и 4x4. С увеличением числа приводных колес повышается проходимость и тяговые качества машины, но усложняется механизм передвижения. Используемое здесь понятие "ось" сложилось исторически, хотя оно не соответствует определению оси. Это понятие правомерно лишь применительно к осям с неприводными колесами, относительно же приводных колес правильно говорить не об осях, а о валах. Маркировку шин наносят на боковины двумя числами через тире (рис 4.7 а) первое число характеризует ширину профиля В, а второе — внутренний диаметр (или посадочный диаметр) d (в миллиметрах или дюймах). У обычной шины наружный диаметр D связан с высотой Н и диаметром обода d зависимостью
D = 2H + d
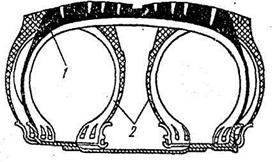
Схема сравнения длины
контакта различных шин с грунтом:
1 — шина уширенная;
2 — шина обычная.
Пневмоколесное ходовое оборудование строительных и коммунальных машин может иметь механический, гидравлический, электрический и комбинированный приводы колес. Наиболее распространенными являются механический и гидравлический приводы. В этих приводах наиболее часто используется вариант привода ведущих колес, Объединённых в мосты попарно через дифференциалы. Это обеспечивает высокие скорости движения машины без проскальзывания колёс.
4.3.2 Типы шин.
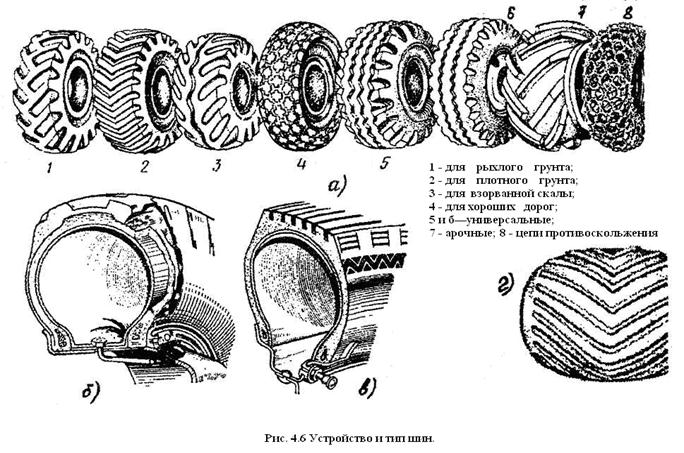 Пневматические шины могут быть камерными (рис. 4.6, 5) и бескамерными (рис. 4.6, в). Камерная шина состоит из покрышки, камеры, ободной ленты и вентиля для накачивания воздуха в камеру. Бескамерные шины представляют собой покрышки, герметически прилегающие к ободьям. Покрышки изготовляют из резины, армированной тканевым и металлическим кордом. Утолщенная периферийная часть покрышки (протектор) имеет рифления определенной формы, называемые рисунком протектора. Различают шины обычного профиля для землеройных машин (рис. 4.6, а) для работы в каменных карьерах 3); противобуксующие 4; 8;) и универсальные 5; 6) Для повышения проходимости при работе на слабых и рыхлых грунтах, а также по снегу используют широкопрофильные и арочные (рис. 4.6, 7) шины с повышенной опорной поверхностью и развитыми грунтозацепами. При работе арочных шин на твердых грунтах и дорогах с твердым покрытием сопротивление передвижению машины увеличивается, а срок службы
Пневматические шины могут быть камерными (рис. 4.6, 5) и бескамерными (рис. 4.6, в). Камерная шина состоит из покрышки, камеры, ободной ленты и вентиля для накачивания воздуха в камеру. Бескамерные шины представляют собой покрышки, герметически прилегающие к ободьям. Покрышки изготовляют из резины, армированной тканевым и металлическим кордом. Утолщенная периферийная часть покрышки (протектор) имеет рифления определенной формы, называемые рисунком протектора. Различают шины обычного профиля для землеройных машин (рис. 4.6, а) для работы в каменных карьерах 3); противобуксующие 4; 8;) и универсальные 5; 6) Для повышения проходимости при работе на слабых и рыхлых грунтах, а также по снегу используют широкопрофильные и арочные (рис. 4.6, 7) шины с повышенной опорной поверхностью и развитыми грунтозацепами. При работе арочных шин на твердых грунтах и дорогах с твердым покрытием сопротивление передвижению машины увеличивается, а срок службы
шин резко уменьшается, при взаимодействии шины с опорным основанием в зоне их контакта деформируется как шина, так и основание. Соотношение этих деформаций зависит от податливости контактирующих тел. В свою очередь, податливость шины зависит от давления воздуха в ней. Следовательно, при определенной внешней нагрузке на шину площадь контактной поверхности, а вместе с ней и среднее удельное давление зависит от давления воздуха в шине. Установлено, что в диапазоне нагрузок от 50 до 100% от допускаемых для данной шины при движении по твердому основанию среднее удельное давление составляет 90... 110% давления воздуха в шине. При движении по плотному грунту эти значения снижаются примерно на 10%.
Максимальные же удельные давления, имеющие место в центральной части контактной поверхности, для большинства строительных машин при качении по плотной грунтовой поверхности и нагрузке, близкой к допускаемой, в два раза выше средних давлений, а при нагрузке, составляющей 50% от допускаемой - выше всего на 30%). В некоторых случаях для повышения проходимости машин на ведущих колесах применяют пневмокатки (рис. 4.6, г) отличающиеся широким профилем, низким давлением и большими грунтозацепами. Для повышения проходимости, снижения сопративления передвижению и уменьшения износа шин в современных строительных машинах давление воздуха в шинах регулирую на ходу из кабины машиниста: его снижают при движении по рыхлому или влажному грунту и повышают при движении по дорогам с твердым покрытием.
4.3.3 Устройство ведущего моста.
На рис.4.8,а представлена схема устройства ведущего моста с дифференциалом, а на рис.4,8, б и в - схема работы последнего. Дифференциал соединяет полуоси ведущих колес с главной конической передачей, давая возможность каждому колесу вращаться с различной скоростью. Это необходимо при повороте машины, когда колеса движутся по дугам окружностей различных радиусов, проходя разные пути, а также, например, при движении одного колеса по ровной, а второго - по неровной дороге.
Дифференциал состоит из главного конического колеса 1 (рис. 4.8 а), жестко соединенного с коробкой 3 и приводимого во вращение от силовой установки машины через шестерню 2, двух ведомых конических зубчатых колес б и 9, жестко посаженных на ведущие полуоси 4 и 10 ходовых колес 5 и 11, и двух сателлитов 7, свободно посаженных на ось 8 и находящихся в постоянном зацеплении с колесами 6 и 9. Крутящий момент от зубчатого колеса 1 передается на коробку 3, вместе с которой вращается ось 8 и сателлиты 7, передающие вращение зубчатому колесу 6 с полуосью 4 и колесу 9 с полуосью 10. При движении по прямой ровной дороге (рис. 4.8, б) все составные части дифференциала, а вместе с ними и полуоси с ходовыми колесами вращаются как одно целое. При повороте вправо (рис. 4.8, в) ходовые колеса, их полуоси и зубчатые колеса 6 и 9 вращаются с разными скоростями, а сателлиты 7 обкатываются относительно зубчатого колеса б, одновременно вращаясь относительно оси 8, и, вследствие зацепления с колесом 9, увеличивают его скорость.
|
|
Дата добавления: 2014-01-11; Просмотров: 1409; Нарушение авторских прав?; Мы поможем в написании вашей работы!