КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Датчик сигнализатора давления масла ДСДМ 3 страница
|
|
|
|
Существуют так же ленточные варианты парковочных радаров. Такие парктроники используют металлизированную пленочную ленту, которая крепится по всей длине пластикового бампера изнутри. Установка такого вида датчиков парковки, как правило, более проста, т.к. нет необходимости в креплении сверлении бампера, а так же отсутствует надобность в дополнительной покраске. Кроме того, ленточные парктроники обладают повышенной чувствительностью и работают в диапазоне от 0.1м до 0.9м (у обычных парковочных радаров рабочая дистанция составляет 0.3-1.5м).
Из множества марок парковочных систем, наиболее успешно зарекомендовали себя и устоялись на рынке такие фирмы, как SHO-ME, ParkMaster и Consul. Компания SHO-ME существует на рынке более 7 лет, поставляя не только парктроники, но и другие всевозможные аксессуары для автомобилей от ведущих мировых производителей США, Кореи и Китая. ParkMaster и Consul, так же специализируются на автомобильном дополнительном оборудовании и в частности парковочных радарах. Ценителям качества, придутся по душе парктроники компании ParkMaster, если же вы отдаете предпочтение цене товара, то радары Consul – это ваш выбор. SHO-ME – по праву может считаться «золотой серединой», ведь именно их парктроники наиболее соответствуют принципу цена и качество. Парктроники SHO-ME, ParkMaster и Consul – это надежность, проверенная временем, вкупе с высоким качеством изготовления.
Задний парктроник.
Парктроник – система позволяющая уверенно парковаться. Она даёт звуковую и визуальную информацию о препятствиях позади вашего автомобиля. Система состоит из блока управления, нескольких ультразвуковых датчиков, проводов для подключения и дисплея или бипера. В дисплей как правило уже встроен бипер и вы одновременно слышите и видите какое препятствие и с какой стороны приближается.
|
|
|
Заднийпарктроник обозначает то, что парктроник рассчитан на работу при движении автомобиля назад. Датчики рассчитаны на установку в задний бампер, в то время как дисплей может крепиться как в передней, так и в задней части автомобиля. Это не имеет никакого значения. Кроме заднего парктроника бывают парктроники «перед-зад» с 6-8 парковочными датчиками. Задний парктроник имеет 2-4 датчиков или отдельный тип парктроников – «ленточные» или «бездатчиковые» парктроники также могут быть установлены на одну из сторон автомобиля: или вперед или назад.
Задний парктроник просто обязан быть на автомобиле начинающего водителя – это важнейший элемент пассивной безопасности. Представьте ситуацию: у вас универсал, кроссовер, седан или внедорожник, абсолютно не важно, вы хотите выехать с парковочного места во дворе и включаете заднюю скорость. Питание подается на лампы заднего хода, а от них на подключенный задний парктроник. Вы посмотрели назад и никого не увидели, однако парктроник почему непрерывистыми звуками даёт понять что где-то сзади есть какое то препятствие… Вы в недоумении.. Проходит мгновение и датчики перестают пищать, а вы видите как позади вашего автомобиля появились очертания ребенка, который подбежал за мячом нагнулся чтобы его поднять и если бы не парктроник вы никогда бы не узнали оегоприсутствии в тот момент рядом с задним бампером автомобиля.
Можете смотреть парктроники с дисплеями, можете выбирать парктроники с бипером – динамиком который будет звуками разной частоты сообщать вам об обнаруженных препятствиях. Минус у задних парктроников с бипером только один – вы не будете понимать с какой стороны препятствие. Однако, по собственному опыту, скажу, что это абсолютно не имеет никакого значения, потому что вы и так представляете что происходит сзади и с какой стороны ждать «опасность». Ленточные задние парктроники – отдельный специальны вид парковочных радаров, о которых мы поговорим в другой статье.
|
|
|
Без датчиков(ленточные).
Данный тип парковочных радаров появился на российском рынке в конце 2009года и уже успел завоевать популярность в среде автолюбителей. Функцию датчиков парковки в этих устройствах заменяет специальная лента, которая крепится на внутренней стороне бампера. Основные преимущества этого парктроника - способен обнаруживать кустарник, сеточные ограждения, не портит внешний вид автомобиля, нет «мертвых» зон как в вертикальной плоскости так и в горизонтальной плоскости, не требует очистки датчиков, для надежной работы, не требует подбора цвета для окраски, так как ничего не красится, не требует точного измерения для сверления отверстий, небольшие затраты на установку системы, возможна установка на бампера, имеющие специфичные конструкцию или внешний вид, таких как автомобили ALFA ROMEO, точная работа до 10см расстояния (большинство датчиковыхпарктроников работает до 30 см).

Рис.53Ленточный парктроник
Парктроник индукционный неврезной.
Принцип работы:
Индукционный парктроник представляет собой устройство, которое с помощью электромагнитных волн способен обнаружить приближение автомобиля к препятствию.Послеактвизациипарктроника, блок управления парктроником генерирует вокруг бампера автомобиля зону защиты. Когда любое препятствие, попадающее в эту зону, приближается к бамперу автомобиля, подается серия звуковых сигналов.
Парктроник с камерой.
Парковочные радары сейчас представлены как никогда очень разнообразными моделями: разное количество датчиков от 2 до 12, разные системы работы датчиков, лента вместо датчиков, сотни вариантов дисплеев, их внешнего вида, проводные и беспроводные, мультимедийные парктроники и собственно парктроники с камерой заднего вида.
Такие парктроники, как правило, имеют в своем арсенале 4-8 датчиков, блок управления один или два, монитор отдельно стоящий или в зеркале заднего вида, камера заднего вида, необходимая для подключения проводка.
Эта пассивная система безопасности совмещает в себе две системы обнаружения препятствия: визуальная и звуковая. На мониторе отображается картинка с камеры заднего вида, а параллельно с этим звук разной частоты дает возможность понять как далеко вы находитесь от препятствия.
|
|
|
 Рис.54 Парктроник с камерой
Рис.54 Парктроник с камерой
Парктроник с камерой заднего вида это необходимое дополнительное оборудование для начинающих водителей. С его помощью легко научиться чувствовать габариты автомобиля, понимать траекторию его движения и не боятся пробираться по заставленному автомобилями двору.
Лекция16 Акселерометры
Акселерометры реагируют на ускорение или силу, действующую на сенсорный элемент датчика. Ускорение, статическое или динамическое, возникает под действием силы, ускоряющей датчик, например, вследствие действия гравитации. Следовательно, акселерометры могут применяться для измерения силы, ускорения, вибрации, движения или перемещения, а также положения и угла наклона (инклинометры). Линейка однокристальных интегральных акселерометров компании Analog Devices Inc. (ADI), выполненных по технологии iMEMS, покрывает практически все области применения устройств подобного типа — от систем управления автомобильными подушками безопасности до сотовых телефонов.
Высокие рабочие характеристики, малое энергопотребление, интегрированная функциональность обработки сигнала, возможность калибровки и программирования, миниатюрность, низкая цена — все это делает акселерометры ADI чрезвычайно привлекательными для разработчиков, «закладывающих» эти устройства в новые изделия. Технология iMEMS (integrated MEMS) от Analog Devices представляет собой разновидность технологии MEMS (Micro Electro Mechanical Systems), позволяющую совмещать на одном кристалле микроэлектромеханические устройства с традиционными электронными элементами интегральных схем.
Технология получения поверхностной микромеханической измерительной структуры интегрального датчика проиллюстрирована рис. 55.
На специально отведенный участок кристалла наносится диоксид кремния (так называемый «жертвенный» слой), проводится литография, вскрываются «окна» для подсоединения микромеханического сенсора к электрической схеме и одновременного получения «якорей», удерживающих конструкцию сенсорной части датчика на кремниевой подложке. Далее сверху наращивается слой поликристаллического кремния, затем посредством литографии и травления поликремния создается сенсорная структура. Наконец, травится «жертвенный» слой, и механическая часть датчика готова (рис. 55б). В результате механическая часть датчика включает поликремниевую пластинку, механически соединенную с подложкой при помощи упругих элементов подвеса, удерживаемых «якорями», способную перемещаться в направлении одной степени свободы под действием ускорения.
|
|
|
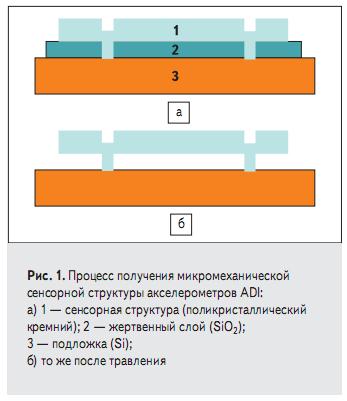
Рис.55 Технология iMEMS
По краям пластинки вытравлены балки, закрепленные на подложке и образующие дифференциальную систему большого числа ячеек парных емкостей. Перемещение подвижной пластинки относительно этих неподвижных балок позволяет регистрировать ускорение (рис. 56). В отсутствие ускорения емкости в ячейке почти одинаковы, если же ускорение отлично от нуля, пластинка смещается, и баланс емкостей нарушается. Кроме того, возможно наличие дополнительных балочных структур, используемых для смещения механики сенсора внешним напряжением — для проверки функциональности датчика или так называемого самотестирования. На рис. 57 показан совмещенный вариант двухосевого датчика, обеспечивающий чувствительность к ускорениям в двух направлениях, отдельно приведено увеличенное изображение упругой подвески, выполненной для увеличения чувствительности в форме меандра.
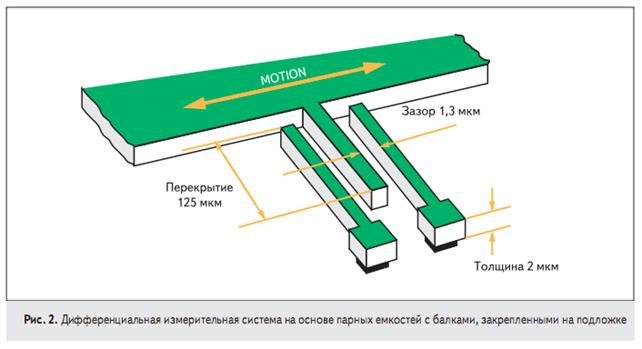
Рис.56 Механическая часть датчика
Принцип работы датчика
При воздействии на подвижный элемент сенсора массой m силы F = ma возникает смещение x, пропорциональное ускорению:
где β — жесткость подвески, a — ускорение смещения сенсора, ω0 — собственная частота колебаний сенсора, определяющая чувствительность механической части системы. На балки, зафиксированные на подложке, подаются электрические сигналы — прямоугольные импульсы различной полярности в противофазе (рис. 56).
При отсутствии ускорения смещение механики отсутствует и емкости равны, поэтому выходной сигнал переменного напряжения, снимаемый с подвижной пластины, также практически равен нулю (всегда присутствует малое ненулевое смещение). При наличии ускорения баланс емкостей нарушается, и появляется переменный сигнал.
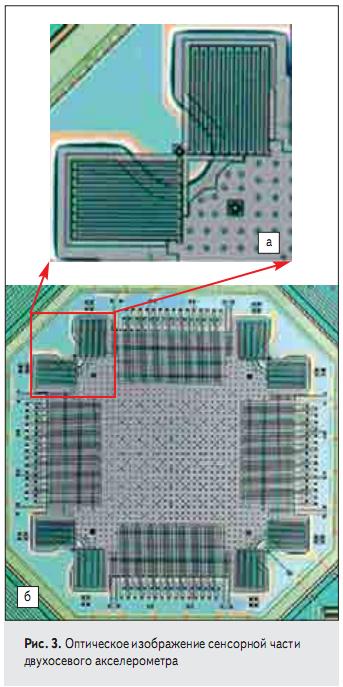
Рис.57 Двухосевой датчик
При малых смещениях подвижной части электрический сигнал
пропорционален величине смещения, которое, в свою очередь, пропорционально ускорению. В акселерометрах ADI полученный сигнал, как правило, детектируется в схеме синхронного демодулятора и усиливается. Необходимо учитывать, что при подаче напряжения между балками возникают электростатические силы, которые тем больше, чем больше разбаланс емкостей. Поэтому для предотвращения нежелательного возбуждения сенсора и уменьшения шумов частота электрического сигнала, подаваемого на емкости, выбирается существенно больше собственной частоты колебаний сенсора.
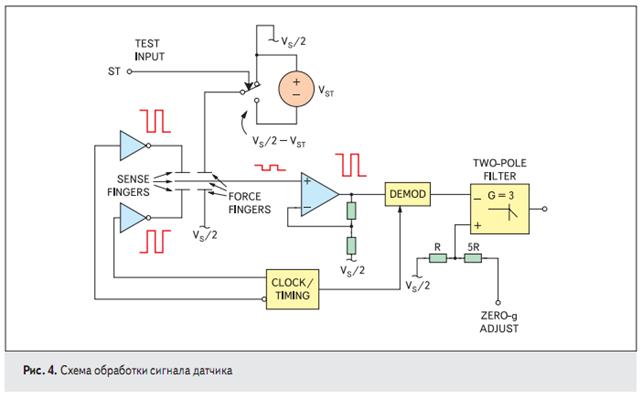
Рис.58Схема включения датчика
Типичное значение резонансной частоты акселерометра редко превышает 10 кГц, частоты подаваемого сигнала — 100 кГц. Выходным сигналом преобразователя после соответствующей обработки сигнала с сенсорной части является напряжение, линейно связанное с величиной ускорения или сигнал широтно-импульсной модуляции (ШИМ), при котором ускорение также пропорционально отношению длительности импульса к периоду последовательности. В линейке интеллектуальных датчиков семейства ADIS существуют также варианты с цифровым выходным сигналом, передаваемым по последовательному SPI-интерфейсу.
Лекция17 Применение акселерометров
Области применения акселерометров определяются их основными параметрами.Важнейшими параметрами акселерометра являются диапазон измеряемых ускорений, чувствительность, выражаемая обычно как отношение сигнала в вольтах к ускорению, нелинейность в процентах от полной шкалы, шумы, температурные дрейфы нуля (смещения) и чувствительности.
В ряде случаев существенной характеристикой оказывается собственная частота колебаний сенсора ω0 или резонансная частота f0, определяющая рабочую полосу частот датчика. В большинстве применений важны температурный диапазон и максимально допустимые перегрузки — характеристики, связанные с условиями эксплуатации датчиков.
Определяющими параметрами, влияющими на точность определения ускорения, являются дрейфы нуля и чувствительности (в основном температурный), а также шумы датчика, ограничивающие порог разрешения устройства. Чувствительность датчика зависит от резонансной частоты механической подсистемы, а также качества электронного преобразователя.
Изменение чувствительности с температурой связано с изменением коэффициента упругости. Температурный дрейф нуля обусловлен изменением коэффициента упругости, тепловым расширением и технологическими погрешностями изготовления сенсора. Изменение параметров электронной части датчика под действием температуры существенно меньше.
Общий уровень шумов акселерометра складывается из шумов микромеханического сенсора и шумов электронной части устройства. Вследствие небольшой массы сенсора существенный вклад в общий уровень шумов вносит составляющая, обусловленная его тепловыми колебаниями. Приравняем тепловую энергию шумов к энергии колебаний сенсора:
где k = 1,38 10 –23 Дж/К — постоянная Больцмана, T — абсолютная температура, a — среднеквадратичное ускорение, A — амплитуда колебаний.
Выражение дает среднеквадратичное значение шумов во всем спектральном диапазоне. Шум часто характеризуется спектральной плотностью (точнее, величиной, пропорциональной корню спектральной плотности энергии шумов). Если считать шум равномерно распределенным от 0 Гц до частоты резонанса f0, то спектральная плотность шумов nf будет равна:

Необходимо также учесть, что значительная часть шумов сосредоточена вблизи резонанса, где спектральная характеристика колебаний сенсора имеет подъем, обратно пропорциональный коэффициенту затухания γ, который имеет смысл величины, обратной времени уменьшения амплитуды в e раз при импульсном воздействии. С учетом этого спектральная среднеквадратичная плотность шумов в области частот значительно ниже резонансной запишется следующим образом:


Среднеквадратичное значение (rms) определяет по существу пороговую чувствительность — минимальный сигнал, который можно измерить. Для получения устойчивого сигнала «без дрожания» порогом шумов следует считать значение размаха шумового сигнала (p-p, peak-to-peak). Кроме того, на суммарную величину шумов влияет диапазон рабочих частот Δf. Общая среднеквадратичная величина шума Nrms связана со спектральной плотностью шумов Nf соотношением (при использовании фильтра НЧ первого порядка):
Для гармонического сигнала его размах (удвоенная амплитуда) отличается от среднеквадратичного значения в

раза. Для шума это отношение представляет собой вероятностную величину. Для белого гауссова шума размах будет лежать в пределах среднеквадратичного значения, умноженного на 6, с вероятностью 0,994:
Уровень шумов практически определяет разрешение по ускорению для данной измерительной системы. Отношение диапазона измерений к уровню шума даёт число эффективных значений. Например, для ADSL203 среднеквадратичный шум в полосе частот 10 Гц составит

размах шума 0,354*6 = 2,12 мg и число эффективных отсчетов «без дрожания» при аналого-цифровом преобразовании —

(3,4 g — диапазон измеряемых ускорений).
Нелинейность
Емкость конденсатора нелинейно зависит от смещения сенсора, линейно связанного с ускорением. В том случае, если сигнал сенсора пропорционален изменению емкостей, относительная нелинейность (отношение нелинейной составляющей изменения емкости к линейной) при смещении обкладок конденсатора x, находящихся на расстоянии d, составит x / d. Это означает, что при смещении 10 нм (d = 1,3 мкм) нелинейные искажения будут порядка 1%. В этом случае, кроме значительной нелинейности, существенно ограничивается также динамический диапазон акселерометра.
Инженерам компании Analog Devices удалось значительно уменьшить нелинейность акселерометра благодаря тому, что сигнал ускорения пропорционален смещению, а не изменению емкости. Это достигается способом возбуждения (сигналы в противофазе) и снятию сигнала напряжения (а не изменения заряда). В результате максимальные нелинейные искажения датчиков ускорения iMEMS составляют доли процентов и, кроме того, расширен динамический диапазон.
Влияние температуры
Датчики, изготовленные по технологии MEMS, весьма чувствительны к изменению температуры. С изменением температуры меняется коэффициент упругости подвески, и, следовательно, чувствительность сенсора; кроме того, имеет место смещение нуля. Для достижения максимальной точности измерений эти изменения необходимо учитывать.
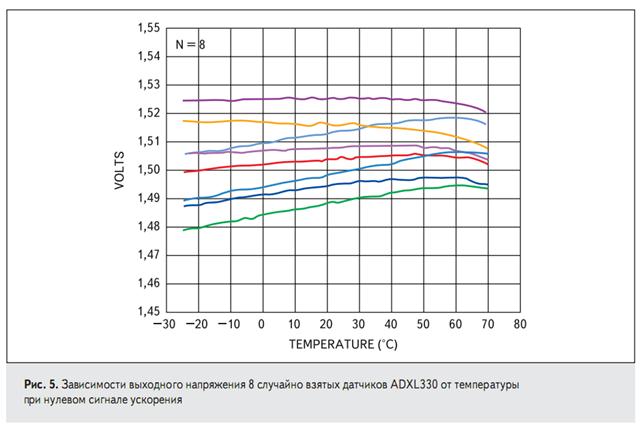
Рис. 59 Температурная характеристика
К счастью, для каждого сенсора зависимость чувствитель-
ности и смещения нуля является воспроизводимой, поэтому один из путей решения проблемы — калибровка датчика в необходимом диапазоне температур (рис. 59). При этом удобно наличие естественного «опорного ускорения» g, соответствующего силе тяжести. Оно меняется от 9,789 до 9,823 в зависимости от географического положения, на полюсе Земли оно больше, на экваторе минимально.
Линейное приближение температурной зависимости легко компенсировать схемотехнически, более точный учет может потребовать использования микроконтроллера. Другой вариант решения проблемы — встраивание датчика температуры, что заметно упрощает использование подобного подхода. В акселерометрах зачастую предусмотрена встроенная возможность самокалибровки (самотестирования). Для этого создаются специальные группы балок, подобных тем, которые отвечают за выходной сигнал акселерометра. При приложении постоянного напряжения U между этими балками, расположенными на расстоянии d, возникнет сила электростатического притяжения F, эквивалентная наличию определенной внешней силы или ускорения:

где ε — абсолютная диэлектрическая проницаемость, S — площадь перекрытия балок, W — энергия плоского конденсатора. Прикладываемое напряжение обычно стабилизировано и слабо зависит от температуры. Идея само калибровки заключается в том, что при изменении температуры выходной сигнал ускорения и выходной сигнал в зависимости от калибрующего смещения меняются пропорционально, так как оба они одинаково зависят от коэффициента упругости подвески.
Существует режим измерений с непрерывной калибровкой, когда калибровочные импульсы подаются периодически в течение всего процесса измерений. При этом необходимо учитывать уменьшение диапазона измерений на величину размаха калибровочного сигнала (и реальный сигнал, и калибровочный, действуя на один и тот же сенсор, суммируются).
Лекция18 Частотные свойства акселерометров
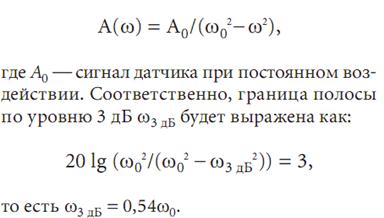 |
Частотный диапазон акселерометра определяется собственной частотой сенсора ω0. Частотная характеристика (без учета потерь энергии колебаний) определяется зависимостью вида:
Следует отметить, что датчик может использоваться при более высоких частотах, чем ω3 дБ, особенно в узкой полосе частот. При этом необходим учет изменения чувствительности с частотой. Измерения ускорения редко ведутся во всем частотном диапазоне. Можно выделить низкочастотные приложения (с верхней граничной частотой 10 –100 Гц) и динамические, когда выделяется сигнал в полосе более высоких частот.
Специализация датчика по применению позволяет искусственно ограничить полосу рабочих частот, что приводит к существенному снижению суммарного шума. В динамических приложениях часто используется ограничение частоты снизу (например, RC-цепочкой, где емкость является разделяющей), что устраняет проблему смещения нуля.
Диапазон частот настраивается при помощи соответствующего аналогового фильтра или с использованием цифровой фильтрации. Пример построения аналогового фильтра показан на рис. 60. Фильтр образуется RC-цепочкой RFILT и CX,Y. Типичные зависимости чувствительности и фазового сдвига при различных
емкостях в цепи фильтра нижних частот показаны на рис.61.
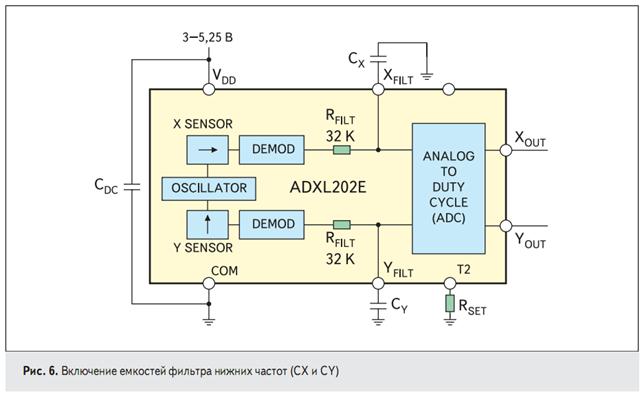
Рис.60 Фильтр нижних частот
Рис.61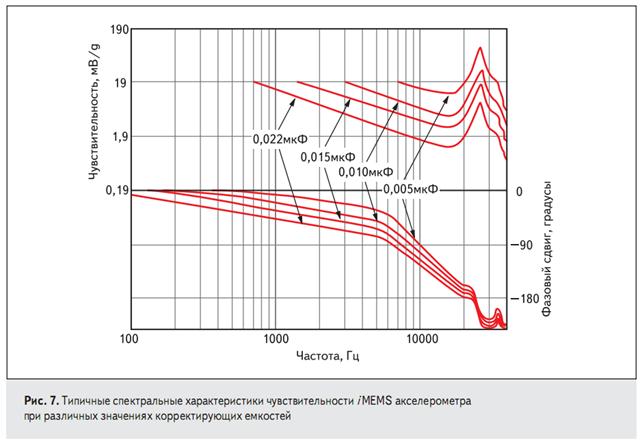
Спектральные характеристики
Компания Analog Devices выпускает широкий спектр акселерометров. Существуют акселерометры с одной, двумя и тремя осями чувствительности, рассчитанными на максимальное ускорение от 1,5 до 250 g. Существуют версии с коммерческим и индустриальным диапазоном рабочих температур. Семейство ADXL — это базовые устройства, в которых сенсор и электроника реализованы на едином кристалле. Серия ADXL3xx позиционируется для массового применения, ADXL1xx и ADXL2xx предназначаются для использования в автоэлектронике (автомобилестроении), промышленности и при создании устройств специального назначения. Акселерометры ADIS представляют собой однокристальные высокоточные устройства с цифровым выходом SPI (12 или 14 бит) и встроенным датчиком температуры.
При выборе акселерометра необходимо иметь в виду диапазон измеряемых ускорений, требуемое разрешение, температурную стабильность и частотный диапазон. Для устройств, работающих в специальных условиях, необходимо также учитывать диапазон рабочих температур и величину максимально допустимой перегрузки.
Высокие рабочие характеристики, малое энергопотребление, интегрированная функциональность обработки сигнала, возможность калибровки и программирования, миниатюрность, низкая цена — все это делает акселерометры ADI чрезвычайно привлекательными для разработчиков, «закладывающих» эти устройства в новые изделия. Уже 250 млн. единиц акселерометров ADI продано к настоящему времени на различные рынки, включая автомобильный, компьютерный, промышленный.
Лекция19 Датчик удара (шок-датчик)
Чувствительным элементом датчика удара, чаще всего, служит пьезоэлемент, либо индукционная система из катушки индуктивности и подвешенного стального либо магнитного сердечника. Реже используются микрофонные системы, фиксирующие звуковые колебания очень низкой частоты. У каждой из этих модификаций датчиков есть свои достоинства и недостатки.
Пьезоэлемент в сочетании с грузом очень эффективно воспроизводит колебания именно тех частот, которые принято считать причиной срабатывания шок-сенсора.
Изменяя длину рычага и массу груза, пьезоэлемент настраивают на разные резонансные частоты в зависимости от последующей обработки сигнала. Чаще всего эта частота от 80 до 200 Гц.
Для пьезоэлемента недостатком является температурная зависимость напряжения, вырабатываемого на одинаковую деформацию. При понижении температуры чувствительность датчика падает. С этим борются путем термокомпенсирующих цепей в усилителе сигнала датчика.
При всей простоте устройства чувствительного элемента шок-сенсора он может вызывать разнообразные технические проблемы, например, различную пространственную чувствительность, когда удары по машине, равные по силе, но разные по направлению или в разные части кузова, вызывают различную реакцию охранной системы.
Другой проблемой является отсутствие на рынке недорогих пьезоэлементов со сколько-нибудь приемлемой повторяемостью параметров внутри даже одной партии. Это ставит большую проблему при массовом производстве автосигнализаций, поскольку индивидуально регулировать каждый датчик в таких широких пределах очень нетехнологично. Эту проблему каждый производитель решает самостоятельно.
Индукционная система также является эффективным чувствительным элементом шок-сенсора. Движущийся стальной, ферритовый или магнитный сердечник относительно катушки наводит в катушке ЭДС, подходящую по амплитуде ударного воздействия на систему. Этот сигнал несложно, практически безо всякой нелинейной обработки, усилить и использовать в "чистом виде" для формирования тревожного события.
Возможно, единственным недостатком таких систем являются довольно приличные габариты чувствительных элементов (катушка, элементы подвески сердечника, сам сердечник). Частота резонанса таких электромеханических систем получается в пределах нескольких десятков герц, что несколько лучше для датчика удара, чем у пьезоэлементов.
Микрофонные системы в автосигнализациях--это зачастую некий компромисс между требуемой в производстве технологичностью и эффектом требуемого датчика.
Сам по себе микрофон воспроизводит столь низкие частоты, свойственные колебаниям при ударном воздействии, но с меньшей амплитудой на выходе, что требует дополнительного усиления. Но при этом микрофон также воспроизводит вторичные колебания, более высокой частоты (звукового диапазона), причиной которых также могло быть ударное воздействие.
По этой причине микрофонные датчики, используемые в качестве чувствительного элемента шок-сенсора, чаще приводят к ложным "звуковым" срабатываниям. Причины здесь разные: неправильная АЧХ, малая постоянная времени, неудачная программа обработки, подверженность к электромагнитным помехам, и не в последнюю очередь слишком высокочастотный (широкополосный) чувствительный элемент.
Датчики удара используются для управления ремнями безопасности, аварийными световыми сигналами и подушкой безопасности, а также в противоугонных системах.
Датчик подушки срабатывает при столкновении на скорости не менее 50 км/ч.
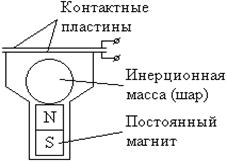 |
Рис.62Конструкция
В состоянии не превышения критического значения
нагрузки шарик притянут постоянным магнитом. Под действием ускорения (при достижении критической нагрузки gкрит) шарик отрывается от магнита (gкрит*m>FПМ) и замыкает контактные пластины. Протекающий ток вызывает срабатывание устройства безопасности.
Инерционная масса - металлический шар. Роль пружины выполняют электромагнитные силы; Устройство измерения и перемещения - контакты пластины.
В спокойном состоянии постоянный магнит притягивает металлический шар - контакты разомкнуты (Fm - сила притяжения магнитного шара).
Если действует ускорение a∙m ≥ Fm, то шар отрывается от постоянного магнита и с ускорением летит к контактам и замыкает их.
Скорость срабатывания - 50 км/ч.
Масса шара - 4 г.
I = 5 мА.
U = 12 В.
Расчет силы удара: Рассчитаем силу удара (столкновение массы m, движущейся со скоростью V, с массивным препятствием и жесткостью k):
F=kx;x – максимальная деформация.Fср=kx/2.Эп=Fср*x=kx2/2;Эп – потенциальная энергия.Эк=mV2/2;Эк – кинетическая энергия.Эк=Эп.mV2/2=kx2/2.

 x=VÖm/k.
x=VÖm/k.
F= kVÖm/k =VÖmk - сила зависит от скорости.
Рассчитаем время удара t0(замедление скорости тела автомобиля от V до 0):
|
|
|
|
Дата добавления: 2014-01-14; Просмотров: 688; Нарушение авторских прав?; Мы поможем в написании вашей работы!