КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Настройка быстродействующего регулятора
|
|
|
|
Структурная схема быстродействующего регулятора представлена ниже. Так как точность регулятора не имеет особого значения, то целесообразно его сделать релейным.
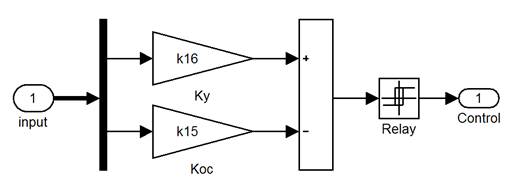
Рис.34. Структурная схема быстродействующего регулятора.
Оптимизацию точного закона управления будем проводить по двум параметрам: коэффициенту усиления всей системы  и коэффициенту обратной связи по скорости
и коэффициенту обратной связи по скорости  .
.
Сначала необходимо подать на вход NCD Outport оптимизируемую величину (в нашем случае – координату положения вала двигателя).
Рис.35. Схема модели для оптимизации быстродействующего закона управления.
Зная предъявляемые к системе требования, ограничим область, в которой может располагаться график зависимости регулируемой величины от времени. Оптимизацию будем производить при единичном ступенчатом входном сигнале. Положение верхней границы не имеет особо важного значения, поэтому примем её на 200% больше от величины входного сигнала, крайняя правая – жестко задана временем регулирования, которое не должно превышать полторы секунды. Т.е. в течение полутора секунд в системе допускаются переходные процессы с очень большим перерегулированием. И движение считается установившимся при попадании величины ошибки в заданный коридор -  .
.
Рис.36. Задание требований к системе(быстродействующий закон управления)
Определение границ может производиться как с помощью мышки, так и введением конкретных значений с клавиатуры в указанных выше меню. Далее задаем величины, по которым будет проводиться оптимизация:  и
и  . Выбираем шаг и запускаем.
. Выбираем шаг и запускаем.
Система анализирует множество всех точек, расположенных в заданной области и посредством последовательного перебора значений искомых параметров с заданным шагом ищет оптимальную их комбинацию, при которой система удовлетворяет предъявленным требованиям, т.е. график зависимости регулируемой величины от времени не выходит за границы указанной области. Если не удается найти именно такие величины, то выдаются предельные значения параметров, при которых система близка к оптимальной и строится график при этих значениях.
|
|
|
В результате поиска было получено что, система почти удовлетворяет предъявленным требованиям при коэффициенте усиления Ку =0.1452 и коэффициенте обратной связи по скорости Кос=0.0552.
Рис.37. Переходный процесс в системе с быстродействующим регулятором.
|
|
|
|
|
Дата добавления: 2014-01-14; Просмотров: 449; Нарушение авторских прав?; Мы поможем в написании вашей работы!