КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Преобразователи координат
|
|
|
|
В рассмотренных структурных схемах двигателя в качестве входных и выходных величин использованы проекции векторов на оси вращающейся системы координат. Они являются сигналами постоянного тока, что позволяет строить систему управления асинхронным двигателем так же, как как систему управления двигателем постоянного тока. Между тем, в реальной системе напряжения и токи представляют собой трехфазные системы синусоидальных величин. Поэтому структурная схема системы управления должна быть дополнена преобразователем координат, выполняющим преобразование величин постоянного тока во вращающейся системе координат в трехфазную систему величин в неподвижной системе координат и обратно.
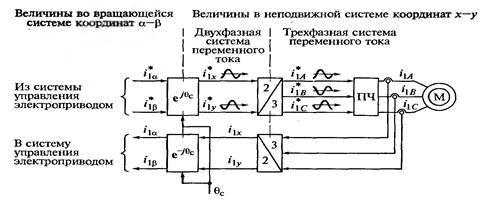
Рис.9. Структура преобразователей координат при векторном управлении.
Рассмотрим преобразования величин из одной системы в другую на примере тока статора (рис.9). Преобразователь имеет два канала: 1) прямой - по которому задающие сигналы сигналы  и
и  из блока вычисления передаются на ПЧ и далее на двигатель;
из блока вычисления передаются на ПЧ и далее на двигатель;
2) обратный – канал обратной связи, по которому информация о текущих значениях пере-менных передается в систему управления электроприводом для вычислений. Знаком «*» у переменных обозначены вычисленные сигналы задания по этим переменным.
Преобразования выполняются в два этапа. В преобразователе канала обратной связи (3/2) трехфазная система синусоидальных величин (i1A, i1B, i1C) преобразуется сначала в двухфазную систему синусоидальных величин (i1x, i1y), а затем двухфазная система в блоке ( ) – в проекции пространственного вектора на оси вращающейся системы координат, представляющие собой сигналы постоянного тока (i1α, i1β). В преобразователе прямого канала из сигналов постоянного тока (и ) в блоке (
) – в проекции пространственного вектора на оси вращающейся системы координат, представляющие собой сигналы постоянного тока (i1α, i1β). В преобразователе прямого канала из сигналов постоянного тока (и ) в блоке ( ) формируется сначала двухфазная система переменных (
) формируется сначала двухфазная система переменных ( и
и  ), а затем она в блоке (2/3) трансформируется в трехфазную систему величин (
), а затем она в блоке (2/3) трансформируется в трехфазную систему величин ( ,
,  ,
,  ), поступающих на вход ПЧ в качестве задания на токи обмотки статора.
), поступающих на вход ПЧ в качестве задания на токи обмотки статора.
Вывод формул преобразования трехфазной системы в двухфазную в неподвижной системе координат (3/2) рассмотрим на примере вектора тока статора. Пространственный вектор тока статора Ĩ 1х-у в неподвижной системе координат х-у:
Ĩ 1х-у = 2/3(i 1A + i 1B + i 1C
+ i 1C ) = 2/3[ i 1A - 1/2 (i 1B + i 1C) + j
) = 2/3[ i 1A - 1/2 (i 1B + i 1C) + j  (i 1B - i 1C)],
(i 1B - i 1C)],
где i 1A, i 1B, i 1C – мгновенные значения токов в обмотках статора.
С другой стороны, вектор Ĩ 1х-у может быть представлен в виде суммы проекций на оси х-у неподвижной системы координат:
Ĩ 1х-у = i 1x + ji 1y.
Проекции i 1x и i 1y представляют собой синусоидальную и косинусоидальную функции соответственно. Приравнивая вещественные и мнимые части, получим формулы преобразования двухфазных величин в трехфазные в неподвижной системе координат:
i 1x = 2/3[ i 1A - 1/2 (i 1B + i 1C)] = i 1A ;
i 1y =  (i 1B - i 1C).
(i 1B - i 1C).
В разделе «Системы координат и их взаимосвязь» была приведена формула для пересчета из неподвижной системы во вращающуюся:  (θС – мгновенное значение угла поворота вращающейся системы α-β относительно неподвижной х-у). Используя ее можно записать:
(θС – мгновенное значение угла поворота вращающейся системы α-β относительно неподвижной х-у). Используя ее можно записать:  и далее, переходя от показательной формы комплексного числа к тригонометрической, получить для проекций вектора тока статора:
и далее, переходя от показательной формы комплексного числа к тригонометрической, получить для проекций вектора тока статора:  , откуда получается правило расчета проекций пространственного вектора в виде:
, откуда получается правило расчета проекций пространственного вектора в виде:


Преобразование полученных проекций вектора из вращающейся системы в двухфазную производится с учетом того, что  :
:


Из равенства  мгновенное значение тока фазы А равно
мгновенное значение тока фазы А равно  . Так как ось х совмещена с осью фазы А, то
. Так как ось х совмещена с осью фазы А, то  и можно записать:
и можно записать:

 ,
,
откуда получаются выражения для определения мгновенных значений тока в трехфазной системе, выраженные через токи в двухфазной системе:
; 

Для вычисления по приведенным ранее формулам необходимо располагать мгновенными значениями угла θС. Он рассчитывается следующим образом:
На рис.9 блоки с соответствующими преобразованиями обозначены: 3/2; 2/3 и ; .
.
Бездатчиковое определение скорости [Л.1: 6.5].
Измеренное (истинное) значение скорости двигателя необходимо иметь при реализации не только замкнутых систем регулирования скорости, но, как мы выяснили, и систем векторного управления. Обычно это выполняется с помощью датчиков скорости. Однако установка датчика требует дополнительных затрат, а в ряде случаев она даже не возможна по конструктивным соображениям. Это привело к разработке методов бездатчикового определения скорости, при которых скорость определяется косвенным путем через доступные измерению электрические переменные, например напряжение и ток обмотки статора. Такие методы влекут за собой усложнение электронной части системы управления, однако при выполнении ее на микропроцессорной основе это не ведет к существенному удорожанию привода. В преобразователях частоты некоторых фирм, в том числе SEW-EURODRIVE, бездатчиковое определение скорости является уже встроенной функцией.
 Бездатчиковое определение скорости может выпол-няться различными способами, сложность которых в зна-чительной степени определяется требуемыми диапазоном регулирования скорости и точностью ее измерения. Для
Бездатчиковое определение скорости может выпол-няться различными способами, сложность которых в зна-чительной степени определяется требуемыми диапазоном регулирования скорости и точностью ее измерения. Для
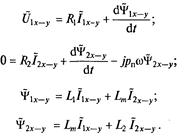
ознакомления с методами решения подобных задач, рас-смотрим один из них В его основу положено векторное описание асинхронного двигателя в неподвижной системе координат х-у:
Наличие скорости ω во втором уравнении позволяет определить ее через значения других переменных. В качестве первого шага необходимо исключить векторы тока и потокосцепления ротора
и потокосцепления ротора , которые не возможно измерить. С этой целью надо найти значение
, которые не возможно измерить. С этой целью надо найти значение  , исключив из двух последних формул ток ротора:
, исключив из двух последних формул ток ротора:
где σ – коэффициент рассеяния двигателя. Продифференцировав это равенство, получим:

Подставив в него выражение для производной от потокосцепления статора, полученное из первого уравнения в виде  определим выражение для второго слагаемого правой части второго уравнения:
определим выражение для второго слагаемого правой части второго уравнения:
 !!!!!!!!!!!!!!!!!!!!!!!!!!!!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Вектор тока ротора может быть выражен через векторы тока и потокосцепления статора:
 .!!!!!!!!!!!!!!!!!!!!!!!!!!
.!!!!!!!!!!!!!!!!!!!!!!!!!!
Подставив полученные выражения во второе уравнение исходной системы уравнений и преобразовав, получим выражение, в которое входят пространственные векторы только тех переменных, которые могут быть измерены, и вектор потока статора, определяемый по уже рассмотренной нами ранее модели потока:

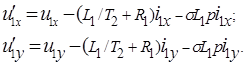
 Следующим шагом является переход во вращающуюся систему α-β. Для этого представим
Следующим шагом является переход во вращающуюся систему α-β. Для этого представим  в виде проекций векторов напряжения
в виде проекций векторов напряжения  ,
,  и тока статора
и тока статора  ,
,  на оси неподвижной системы координат х-у и используем преобразование . Кроме того, введем новыеые переменные
на оси неподвижной системы координат х-у и используем преобразование . Кроме того, введем новыеые переменные  и
и  :
:
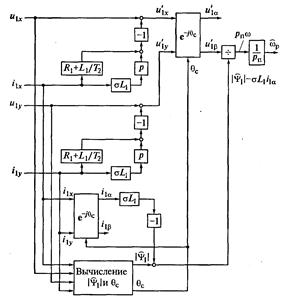
Структурная схема бездатчикового определения скорости, приведена на рис.10.
а) б)
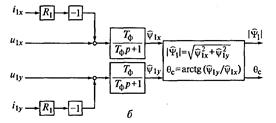
Рис.10. Бездатчиковое определение скорости: а) структура; б) модель потока.
Вычисление текущих значений угла θ с, модуля потокосцепления статора  и его проекций вектора
и его проекций вектора  и
и  производятся по модели потока (рис.10,б).
производятся по модели потока (рис.10,б).
Переходя в систему координат α-β и направляя ось α по вектору  , т.е. полагая
, т.е. полагая  , после разделения вещественной и мнимой частей выражение для может быть представлено в виде:
, после разделения вещественной и мнимой частей выражение для может быть представлено в виде: 

Скорость вычисляется по второму из этих выражений: 
|
|
|
|
|
Дата добавления: 2014-10-15; Просмотров: 1811; Нарушение авторских прав?; Мы поможем в написании вашей работы!