КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Миттьовий центр прискорень
|
|
|
|
План
План
1. Поступальний рух твердого тіла.
2.Обертальний рух твердого тіла. Кутові швидкість та прискорення.
3. Швидкості й прискорення точок тіла, яке обертається навколо осі.
1. Поступальний рух твердого тіла
У кінематиці всі тверді тіла будемо розглядати як абсолютно тверді, тобто такі, в яких відстані між двома будь-якими точками тіла залишаються сталими за весь час руху.
Завдання кінематики твердого тіла розкладається на дві частини:
1) задання руху і вивчення кінематичних характеристик руху всього тіла в цілому;
 2) вивчення руху кожної точки тіла окремо.
2) вивчення руху кожної точки тіла окремо.
Поступальним називається такий рух твердого тіла, при якому будь-яка пряма, проведена в цьому тілі, рухається паралельно сама собі.
Поступальний рух не слід плутати з прямолінійним. На відміну від останнього, де траєкторією руху є пряма, в поступальному русі траєкторіями точки тіла можуть бути будь-які криві. Прикладом поступального руху є рух шатуна АВ у чотириланковому механізмі О1АВО2 (рис.1), який складається з двох кривошипів О1А та О2В однакової довжини і шатуна АВ, довжина якого дорівнює відстані О1О2. Очевидно, що в усіх положеннях механізму чотирикутник О1АВО2 залишається паралелограмом. Отже, шатун АВ весь час паралельний прямій О1О2, і його рух є поступальним.
Теорема про траєкторії, швидкості й прискорення в поступальному русі. У поступальному русі всі точки тіла описують однакові (такі, що при накладанні збігаються) траєкторії і мають у кожний момент часу однакові за модулем і напрямком швидкості та прискорення.
 Доведення. Розглянемо тіло, яке здійснює поступальний рух відносно обраної системи відліку Охуz. Візьмемо в ньому довільні точки А і В, положення яких у момент часу t визначається відповідними радіусами-векторами
Доведення. Розглянемо тіло, яке здійснює поступальний рух відносно обраної системи відліку Охуz. Візьмемо в ньому довільні точки А і В, положення яких у момент часу t визначається відповідними радіусами-векторами  і
і  (рис.2). Провівши вектор
(рис.2). Провівши вектор  , помічаємо, що
, помічаємо, що

Оскільки відстань між точками твердого тіла – величина стала, то довжина АВ залишається однаковою в усіх його положеннях, напрямок не змінюється, тому що тіло рухається поступально. Таким чином, вектор за весь час руху залишається сталим.
Отже, при поступальному русі тіла радіуси-вектори двох його довільних точок, змінюючись, будуть відрізнятися один від одного на сталий вектор. Тому траєкторії точок А і В будуть однаковими, вони збігаються одна з одною при паралельному їх перенесенні.
Продиференціюємо отримане рівняння за часом, маємо:
 .
.
Похідна від сталого вектора дорівнює нулю. Похідні від векторів та за часом дають швидкості відповідних точок. Тому
 ,
,
тобто швидкості двох точок тіла А і В у будь-який момент часу при поступальному русі однакові як за модулем, так і за напрямком. Тепер продиференціюємо отриману рівність за часом, дістанемо:
 або
або  ,
,
тобто прискорення точок А і В тіла у будь-який момент часу його руху також однакові за модулем і напрямком. Теорема доведена.
З теореми випливає, що поступальний рух цілком визначається рухом якої-небудь його точки. Тому завдання вивчення поступального руху зводиться до завдань кінематики точки, які розглянуті вище.
При поступальному русі спільну для всіх точок тіла швидкість  називають швидкістю поступального руху тіла, а прискорення
називають швидкістю поступального руху тіла, а прискорення  – прискоренням поступального руху тіла. Вектори і можуть бути зображені прикладеними в будь-якій точці тіла.
– прискоренням поступального руху тіла. Вектори і можуть бути зображені прикладеними в будь-якій точці тіла.
Зауважимо, що говорити про швидкість і прискорення тіла можна тільки у випадку його поступального руху, в інших випадках точки тіла мають різні швидкості й прискорення.
2. Обертальний рух твердого тіла. Кутові швидкість і прискорення
 Обертальним називається такий рух твердого тіла, в якому які-небудь дві точки, взяті на тілі (або незмінно з ним зв'язані), залишаються весь час нерухомими (рис.3). Пряма ОО1, яка з'єднує нерухомі точки О і О1, називається віссю обертання. Всі точки, які лежать на осі обертання, будуть нерухомими, а решта − описують кола з центром на осі обертання, причому площини кіл будуть перпендикулярні до осі обертання.
Обертальним називається такий рух твердого тіла, в якому які-небудь дві точки, взяті на тілі (або незмінно з ним зв'язані), залишаються весь час нерухомими (рис.3). Пряма ОО1, яка з'єднує нерухомі точки О і О1, називається віссю обертання. Всі точки, які лежать на осі обертання, будуть нерухомими, а решта − описують кола з центром на осі обертання, причому площини кіл будуть перпендикулярні до осі обертання.
Прикладом обертального руху може бути рух дверей або створок вікон при їх відкриванні, рух стрілок годинника, обертання ротора електродвигуна тощо.
Нехай деяке тіло обертається навколо осі ОО1 (рис.3). Проведемо через вісь обертання в деякий момент часу площину S і зафіксуємо її положення в просторі, а через певний проміжок часу проведемо площину S1, незмінно зв'язану з тілом. Кут φ між цими площинами, взятий з відповідним знаком, буде визначати положення тіла в будь-який момент часу. Кут φ називається кутом повороту тіла. Умовимось, що додатний напрям кута φ буде в тому випадку, якщо поворот площини S1 відносно фіксованої площини S здійснився проти ходу годинникової стрілки (дивитися слід з боку додатного напрямку осі Оz), івід'ємним – за ходом годинникової стрілки. Кут φ вимірюється в радіанах.
Щоб визначити положення тіла в просторі в будь-який момент часу, необхідно знати залежність між кутом повороту φ і часом t, тобто:
φ=f(t).
Це рівняння називається рівнянням обертального руху тіла.
Бистрота зміни кута повороту з часом характеризується величиною, яка називається кутовою швидкістю.
За достатньо малий проміжок часу Δt кут змінюється на величину Δφ. Відношення Δφ до Δt називається середньою кутовою швидкістю за даний проміжок часу і позначається ωср:
ωср.= .
.
Кутовою швидкістю в даний момент часу t називається величина, до якої прямує значення ωср, коли проміжок часу Δt наближається до нуля:
 .
.
Таким чином, кутова швидкість у даний момент часу чисельно дорівнює першій похідній від кута повороту за часом, тобто показує, на який кут повертається тіло за одиницю часу. Кутова швидкість визначає також і напрямок обертання. Так, якщо ω>0, то тіло обертається в напрямку збільшення кута повороту – проти ходу годинникової стрілки, і в зворотному напрямку, якщо ω<0. Кутова швидкість вимірюється в радіанах за секунду (рад/с, с-1).
Якщо ω=соnst, то обертання тіла називається рівномірним. Закон рівномірного обертання: φ=φ0+ωt. Якщо φо=0, то φ=ωt.
Звідси кутова швидкість обчислюється за формулою:
 .
.
У техніці швидкість рівномірного обертання часто задають числом n обертів за хвилину. Знайдемо між ними залежність. За один оберт тіло повертається на кут 2π, а за n обертів – на 2πn. Цей поворот виконується за час t=1хв=60с, тоді маємо:

 .
.
Кутову швидкість зображають у вигляді вектора  , який напрямлений вздовж осі обертання в той бік, звідки обертання тіла відбувається проти ходу годинникової стрілки (див. рис.3).
, який напрямлений вздовж осі обертання в той бік, звідки обертання тіла відбувається проти ходу годинникової стрілки (див. рис.3).
Кутове прискорення характеризує бистроту зміни швидкості з часом. За проміжок часу ∆t швидкість тіла змінюється на ∆ω. Відношення ∆ω до ∆t називається середнім кутовим прискоренням за цей проміжок часу і позначається εср:
 .
.
Кутовим прискоренням в даний момент часу t називається величина, до якої прямує εср ., коли проміжок часу Δt наближається до нуля:
або, зваживши на попередній результат, маємо:
Таким чином, кутове прискорення в даний момент часу чисельно дорівнює першій похідній від кутової швидкості або другій похідній від кута повороту тіла за часом, тобто показує зміну кутової швидкості за одиницю часу. Кутове прискорення вимірюється в радіанах за секунду в квадраті (рад/с2, с-2).
Якщо знаки ω і ε однакові, то рух прискорений, якщо різні – сповільнений.
Якщо за час руху ε залишається сталою величиною, то такий рух називається рівнозмінним. Знайдемо закон рівнозмінного обертання. Для цього оберемо початковий момент часу t0=0, кут φ=φ0, а початкова швидкість ωо.
Знаючи, що  , дістанемо:
, дістанемо:
dω=εdt.
Проінтегруємо ліву частину в межах від ωо до ω, а праву −вмежах від 0 до t, дістанемо:

Це рівняння запишемо у вигляді:
 .
.
Проінтегруємо другий раз і маємо закон рівнозмінного обертання:
 .
.
Кутове прискорення тіла, як і кутову швидкість, зображають у вигляді вектора  , який напрямлений вздовж осі обертання, причому його напрямок збігається з напрямком уприскореному русі й протилежний – у сповільненому.
, який напрямлений вздовж осі обертання, причому його напрямок збігається з напрямком уприскореному русі й протилежний – у сповільненому.
3. Швидкості й прискорення точок тіла, яке обертається навколо осі
Точки тіла, яке обертається навколо осі, рухаються не однаково. Але, знаючи закон обертального руху тіла, можна визначити швидкість і прискорення будь-якої його точки в будь-який момент часу. З цією метою встановимо залежність між кутовими величинами φ, ω та ε, які характеризують обертальний рух тіла, і лінійними величинами s, v, а τ, an, а, які характеризують рух точок тіла.
Як ми відзначили вище, точки тіла, що обертається, рухаються по колах, центри яких лежать на осі обертання.
Нехай точка А тіла (рис.4), яке нерівномірно обертається навколо осі О, з поворотом його на кут φ пройде відстань s. Вона вимірюється дугою  кола, радіус якого R. Тоді:
кола, радіус якого R. Тоді:
s=Rφ.
 Відстань s і кут φ – функції часу t, а R – величина стала для даної точки. Продиференціюємо за часом обидві частини рівняння і дістанемо:
Відстань s і кут φ – функції часу t, а R – величина стала для даної точки. Продиференціюємо за часом обидві частини рівняння і дістанемо:
 або v = R ω.
або v = R ω.
Швидкість ν називається лінійною або коловою швидкістю точки А.
Таким чином, лінійна швидкість точки твердого тіла, яке обертається навколо осі, чисельно дорівнює добутку кутової швидкості тіла на відстань від цієї точки до осі обертання.
 Лінійна швидкість напрямлена по дотичній, проведеній до кола, описуваного точкою А, або перпендикулярно до радіуса R. Оскільки ω для всіх точок тіла в даний момент має одне й те ж значення, то із формули випливає, що лінійні швидкості точок тіла, яке обертається навколо осі, пропорційні їх відстаням від осі обертання.
Лінійна швидкість напрямлена по дотичній, проведеній до кола, описуваного точкою А, або перпендикулярно до радіуса R. Оскільки ω для всіх точок тіла в даний момент має одне й те ж значення, то із формули випливає, що лінійні швидкості точок тіла, яке обертається навколо осі, пропорційні їх відстаням від осі обертання.
Покажемо, що вектор лінійної швидкості точки тіла, що обертається, можна визначити як векторний добуток кутової швидкості тіла на радіус-вектор точки, проведений із довільної точки О, взятої на осі обертання (рис.5), тобто
 .
.
Ця формула називається формулою Ейлера. Отже, необхідно довести, що вектор ( ) напрямлений по дотичній до траєкторії точки в бік обертання тіла, амодуль його дорівнює модулю швидкості точки М, тобто
) напрямлений по дотичній до траєкторії точки в бік обертання тіла, амодуль його дорівнює модулю швидкості точки М, тобто
׀ ׀ = ωR.
Дійсно, векторний добуток дає вектор, перпендикулярний площині, в якій лежать вектори i  (це площина ОМС), напрямлений у той бік, звідки найкоротший поворот від вектора до вектора бачиться проти ходу годинникової стрілки. Цей напрямок збігається з напрямком вектора . При цьому
(це площина ОМС), напрямлений у той бік, звідки найкоротший поворот від вектора до вектора бачиться проти ходу годинникової стрілки. Цей напрямок збігається з напрямком вектора . При цьому
׀ ׀ = ׀ ׀·׀ ׀ sinβ,
де β – кут між векторами i .
Як бачимо з рисунка, ׀ ׀ sinβ = R, тоді ׀ ׀ = ωR.
Отже, формула Ейлерадоведена.
Продиференціюємо обидві частини рівняння v= R ω, маємо:

або
at=R×e.
Підставивши в формулу  значення швидкості, маємо:
значення швидкості, маємо:
an = Rw2.
Дотичне прискорення  напрямлене по дотичній до траєкторії руху точки в бік руху, якщо тіло обертається прискорено, і в зворотному напрямі, якщо воно обертається сповільнено. Нормальне прискорення
напрямлене по дотичній до траєкторії руху точки в бік руху, якщо тіло обертається прискорено, і в зворотному напрямі, якщо воно обертається сповільнено. Нормальне прискорення  завжди напрямлене по радіусу до осі обертання (рис.6).
завжди напрямлене по радіусу до осі обертання (рис.6).
Повне прискорення точки А:

 Відхилення вектора повного прискорення від радіуса кола, яке описує точка, визначається кутом α, який обчислюється за формулою:
Відхилення вектора повного прискорення від радіуса кола, яке описує точка, визначається кутом α, який обчислюється за формулою:
 або
або 
Через те що в даний момент часу ω і ε для всіх точок обертання тіла мають одне і те ж значення, то із формули випливає, що прискорення всіх точок тіла, яке обертається навколо осі, пропорційні їх відстаням від осі обертання.
Задача. При запуску двигуна його шків діаметром d= 0,2 м протягом перших декількох секунд обертається згідно рівняння φ= 0,2 t3. Визначити швидкості й прискорення точок, розміщених на ободі шківа в момент часу t1 =5 с.
Розв'язання. Диференціюючи рівняння руху шківа, знаходимо його кутову швидкість:
 .
.
У момент часу t1 =5с: w= 0,6×52 = 15 рад/с.
Продиференціювавши рівняння кутової швидкості шківа, визначимо його кутове прискорення:
 .
.
У момент часу t1=5с: e= 1,2×5 = 6 рад/с2.
Знаходимо швидкість і прискорення точок, розміщених на ободі шківа:
v = w×R = 15×0,1 = 1,5 м/c,
 .
.
Питання для самоконтролю
1. У чому полягають завдання кінематики твердого тіла?
2. Який рух тіла називається поступальним? Його приклади.
3. Сформулювати і довести теорему про траєкторії, швидкості та прискорення точок у поступальному русі тіла.
4. Який рух тіла називається обертальним? Приклади та рівняння обертального руху.
5. Дати означення середній кутовій швидкості, кутовій швидкості в даний момент часу. Як визначається остання?
6. Дати означення середньому кутовому прискоренню, кутовому прискоренню в даний момент часу. Як воно визначається?
7. Записати рівняння рівномірного та рівнозмінного обертання.
8. Як визначається лінійна швидкість точок тіла у його обертальному русі?
9. Довести формулу Ейлера.
10..Як визначається прискорення точок тіла у його обертальному русі?
Лекція № 13
Тема: “Плоскопаралельний рух твердого тіла”
1. Рівняння плоскопаралельного руху.
2. Визначення швидкостей та прискорень точок тіла у плоскопаралельному русі.
3. Миттьовий центр швидкостей Теорема про проекції швидкостей двох точок тіла у його плоскопаралельному русі.
1. Рівняння плоскопаралельного руху
Плоскопаралельним рухом або плоским рухом твердого тіла називається такий рух, в якому всі його точки переміщаються паралельно деякій нерухомій площині. Такий рух спостерігається в багатьох механізмах і машинах, наприклад, рух шатуна в кривошипно-повзунковому механізмі, рух колеса, яке котиться по прямолінійній ділянці. Обертальний рух тіла можна розглядати частковим випадком плоскопаралельного руху.
 Вивчаючи плоскопаралельний рух твердого тіла, достатньо розглянути рух його плоского перерізу. Оскільки положення плоскої фігури на площині визначається положенням двох її точок або положенням відрізка, який з'єднує дві точки цієї фігури, то рух плоскої фігури в її площині можна вважати рухом прямолінійного відрізка АВ у цій площині (рис.1).
Вивчаючи плоскопаралельний рух твердого тіла, достатньо розглянути рух його плоского перерізу. Оскільки положення плоскої фігури на площині визначається положенням двох її точок або положенням відрізка, який з'єднує дві точки цієї фігури, то рух плоскої фігури в її площині можна вважати рухом прямолінійного відрізка АВ у цій площині (рис.1).
У свою чергу положення відрізка АВ можна визначити через координати хА, уА точки А і кутом φ, який він утворює з віссю х. Довільно обрана точка А для визначення положення фігури називається полюсом.
Оскільки координати хА, yА і кут φ будуть змінюватися з часом, то для визначення положення тіла в будь-який момент часу треба знати залежності:
xа=f1(t), уА=f2(t), φ=f3(t).
Ці рівняння називаються рівняннями плоскопаралельного руху тіла.
 Покажемо, що переміщення фігури можна здійснити сукупністю двох переміщень: поступального і обертального. Уявимо, що плоска фігура перемістилася на площині з положення І (АВ) в положення ІІ(А1В1) (рис.2).
Покажемо, що переміщення фігури можна здійснити сукупністю двох переміщень: поступального і обертального. Уявимо, що плоска фігура перемістилася на площині з положення І (АВ) в положення ІІ(А1В1) (рис.2).
Спочатку перемістимо фігуру поступально з положення АВ в положення А1В', тобто так, щоб точка А перемістилась у нове положення А1, а точка В описала траєкторію, тотожну траєкторії точки А. Потім повернемо фігуру навколо точки А1 на кут φ1 так, щоб точка В' збіглася з точкою В1.
Тепер перемістимо фігуру поступально з положення АВ в положення А'В1, а потім повернемо її навколо точки В1 на кут φ 2 так, щоб точка А' збігалась з точкою А1.
Як бачимо, поступальні переміщення фігури різні, а величина кута повороту і напрямок його однакові φ1=φ2.
Отже, плоскопаралельний рух твердого тіла складається з поступального руху разом з довільно обраною точкою, тобто полюсом, і обертального руху навколо нього. При цьому поступальне переміщення залежить від вибору полюса, а обертальна частина руху – не залежить. Поступальна частина плоскопаралельного руху описується першими двома рівняннями, а обертання навколо полюса - третім із цих рівнянь.
2. Визначення швидкостей та прискорень точок тіла у плоскопаралельному русі.
Положення будь-якої точки М, взятої на тілі, яке здійснює плоскопаралельний рух, визначається радіусом-вектором у системі відліку Оху (рис.3).
Як бачимо з рисунка,
 ,
,
 де
де  – радіус-вектор полюса А,
– радіус-вектор полюса А,  – вектор, який визначає положення точки М відносно осей Ах'у', що переміщаються разом з полюсом А поступально.
– вектор, який визначає положення точки М відносно осей Ах'у', що переміщаються разом з полюсом А поступально.
Звідси:
 .
.
Тут  не що інше, як швидкість полюса
не що інше, як швидкість полюса  , а
, а  – швидкість
– швидкість  , яку точка М отримує в обертанні тіла навколо полюса.
, яку точка М отримує в обертанні тіла навколо полюса.
Отже,
 .
.
Величина швидкості обчислюється за формулою:
vMA = ω МА.
Вектор напрямлений перпендикулярно радіусу-вектору  .
.
 Таким чином, швидкість будь-якої точки М тіла у його плоскопаралельному русі дорівнює геометричній сумі швидкості будь-якої іншої точки А, обраної за полюс, і швидкості точки М в її обертальному русі разом з тілом навколо цього полюса (див. рис.4).
Таким чином, швидкість будь-якої точки М тіла у його плоскопаралельному русі дорівнює геометричній сумі швидкості будь-якої іншої точки А, обраної за полюс, і швидкості точки М в її обертальному русі разом з тілом навколо цього полюса (див. рис.4).
Оскільки прискорення точки є другою похідною від радіуса-вектора, який визначає положення точки М, то запишемо:
Перший доданок – це прискорення полюса А, тобто аА, а  – прискорення точки М в її обертальному русі разом з тілом навколо полюса А. Тому:
– прискорення точки М в її обертальному русі разом з тілом навколо полюса А. Тому:

Скориставшись формулами для обертального руху, маємо:

 Таким чином, прискорення будь-якої точки М тіла у його плоскопаралельному русі дорівнює геометричній сумі прискорення якої-небудь іншої точки, обраної за полюс, і прискорення точки М в її обертальному русі разом з тілом навколо цього полюса (рис.5).
Таким чином, прискорення будь-якої точки М тіла у його плоскопаралельному русі дорівнює геометричній сумі прискорення якої-небудь іншої точки, обраної за полюс, і прискорення точки М в її обертальному русі разом з тілом навколо цього полюса (рис.5).
При розв’язанні задач часто зручнішим є заміна вектора  його дотичною
його дотичною  і нормальною
і нормальною  складовими, де
складовими, де
 =АМ·ε,
=АМ·ε,  =АМ·ω2.
=АМ·ω2.
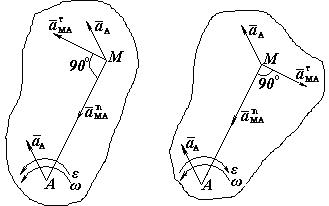 Рис.6
Рис.6
|
Вектор напрямлений перпендикулярно відрізку АМ у бік обертання, коли воно прискорене, і в протилежний бік, коли воно сповільнене. Вектор напрямлений завжди вздовж відрізка АМ, причому від точки М до полюса А (рис.6).
Тоді дістанемо рівняння:
 .
.
3. Миттьовий центр швидкостей. Теорема про проекції швидкостей двох точок тіла у його плоскопаралельному русі
 Миттьовим центром швидкостей фігури в плоскопаралельному русі називається така її точка, абсолютна швидкість якої в даний момент часу дорівнює нулю. Такою точкою буде точка С (рис.7), у якої переносна швидкість
Миттьовим центром швидкостей фігури в плоскопаралельному русі називається така її точка, абсолютна швидкість якої в даний момент часу дорівнює нулю. Такою точкою буде точка С (рис.7), у якої переносна швидкість  полюса і відносна швидкість
полюса і відносна швидкість  однакові за величиною (
однакові за величиною (  =
=  = ω·ОС) і напрямлені в протилежні боки. У кожний момент часу така точка тільки одна, тому вона обов'язково лежить на прямій МN, перпендикулярній , на відстані
= ω·ОС) і напрямлені в протилежні боки. У кожний момент часу така точка тільки одна, тому вона обов'язково лежить на прямій МN, перпендикулярній , на відстані  .
.
Справді,
 .
.
 Положення миттьового центра швидкостей постійно змінюється з часом. Отже, плоскопаралельний рух тіла можна подати увигляді миттьових обертань навколо центрів (осей), які займають у кожний момент часу різні положення.
Положення миттьового центра швидкостей постійно змінюється з часом. Отже, плоскопаралельний рух тіла можна подати увигляді миттьових обертань навколо центрів (осей), які займають у кожний момент часу різні положення.
Якщо, наприклад, у даний момент часу миттьовий центр швидкостей знаходиться в точці С (рис.8), то швидкості будь-яких інших точок А і В будуть перпендикулярні до прямих, які з'єднують ці точки з точкою С, і напрямлені в бік їх обертання, а їх модулі:
 =ω·АС;
=ω·АС;  =ω·ВС.
=ω·ВС.
Отже, швидкість точки плоскої фігури дорівнює її обертальній швидкості навколо миттьового центра швидкостей С. Із рівності також виходить, що
 ,
,
тобто швидкості точок тіла пропорційні їх відстаням до митьового центра швидкостей.
Якщо відомі швидкості двох довільних точок плоскої фігури і  (рис.8), то миттьовий центр швидкостей знаходиться в точці перетину перпендикулярів, проведених до цих векторів.
(рис.8), то миттьовий центр швидкостей знаходиться в точці перетину перпендикулярів, проведених до цих векторів.
Якщо ж вектори швидкостей двох точок у даний момент часу паралельні, то можливі такі випадки (рис.9):
1. Вектори і паралельні й не перпендикулярні до прямої АВ, яка з'єднує точки А і В (рис.9,а). Миттьовий центр знаходиться у нескінченності, тобто обертання немає – тіло рухається поступально, і =.
2. Вектори швидкостей і точок А і В перпендикулярні до прямої АВ, яка з'єднує ці точки. Для визначення положення миттьового центра слід з'єднати прямою кінці векторів і знайти точку С перетину цієї прямої з прямою АВ (рис.9,б, в).
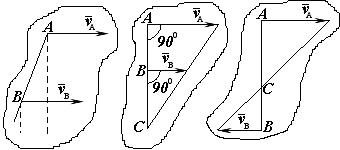
а) б) в)
Рис.9
Крім зазначених випадків (рис.9), не можна довільно задавати за модулем і напрямком вектори швидкостей двох точок фігури в її плоскопаралельному русі. Ці вектори зв'язані теоремою: проекції векторів швидкостей двох точок фігури на пряму, яка з'єднує ці точки, однакові між собою.
Доведення. Нехай на рис.10 побудовані вектори і . Якщо точку А обрати за полюс, то маємо:
=+ .
.
 Спроектувавши цю рівність на пряму АВ і врахувавши, що вектор напрямлений перпендикулярно АВ, а отже, пр. = 0, маємо пр. = пр. , що і треба було довести.
Спроектувавши цю рівність на пряму АВ і врахувавши, що вектор напрямлений перпендикулярно АВ, а отже, пр. = 0, маємо пр. = пр. , що і треба було довести.
Справедливість твердження теореми очевидна із рисунка 10. Проекції вектора і вектора ,побудованих у точці В, на пряму АВ однакові, оскільки кінці цих векторів лежать на одному перпендикулярі до прямої АВ.
4. Миттьовий центр прискорень
 Миттьовим центром прискорень називається точка, прискорення якої в даний момент часу дорівнює нулю.
Миттьовим центром прискорень називається точка, прискорення якої в даний момент часу дорівнює нулю.
Положення Q миттьового центра прискорень визначається тоді, коли відомі прискорення  якої-небудь точки А тіла і кутові швидкість ω та прискорення ε тіла (рис.11).
якої-небудь точки А тіла і кутові швидкість ω та прискорення ε тіла (рис.11).
Тоді знаходимо величину кута α за формулою:

Від точки А під кутом α до вектора проводимо пряму АЕ (рис.11), причому кут відкладаємо в бік обертання, якщо воно прискорене, і в протилежний бік, якщо воно сповільнене. Уздовж лінії АЕ помічаємо відрізок АQ, довжину якого знаходимо так:
AQ = .
.
Визначена таким чином точка Q і буде миттьовим центром прискорень. Справді:
aQA= =
=
 =aA..
=aA..
Оскільки вектор  повинен утворювати з лінією AQ кут α, то вектор паралельний , але напрямлений у протилежний бік, тобто = –, а тому
повинен утворювати з лінією AQ кут α, то вектор паралельний , але напрямлений у протилежний бік, тобто = –, а тому  =+= 0.
=+= 0.
Якщо точку Q взяти за полюс, то прискорення будь-якої точки М буде:
 = +
= +  = і аМ = QM .
= і аМ = QM .
Отже, прискорення будь-якої якої точки тіла дорівнює її прискоренню в обертальному русі навколо миттьового центра прискорень Q. При цьому:

тобто прискорення точок тіла пропорційні їх відстаням від миттьового центра прискорень.
Зазначимо, що положення центрів швидкостей і прискорень у даний момент часу не збігаються.
Задача. Визначити швидкість повзуна В і кутову швидкість шатуна АВ при горизонтальному положенні кривошипа ОА, який обертається навколо осі О з кутовою швидкістю ω0= 1,5 рад/с, якщо ОА= 0,2 м, АВ= 1 м.
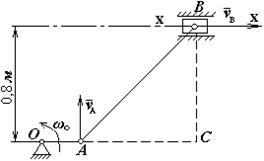 Рис.12
Рис.12
|
Розв'язання. Знайдемо положення миттьового центра швидкостей шатуна, який у даному випадку знаходиться на перетині перпендикулярів до векторів швидкостей і точок А і В. Напрямки і відомі: напрямлений перпендикулярно до кривошипа ОА, тобто вертикально вгору, – паралельно напрямній х - х. Таким чином, миттьовий центр вказаних швидкостей знаходиться в точці С. Тепер можемо записати:
Але модуль швидкості точки А легко обчислюється із співвідношення:
vA=ω0ОА = 1,5·0,2 = 0,3 м/с.
Із рисунка бачимо, що довжина АС:
АС = = 0,6 (м).
= 0,6 (м).
Кутова швидкість шатуна ωав визначиться із формули:
ωАВ= рад/с.
рад/с.
Тепер обчислимо швидкість повзуна В:
vВ= 0,5·0,8=0,4 м/с.
Питання для самоконтролю
1. Який рух називається плоскопаралельним? Приклади плоскопаралельного руху.
2. Якими рівняннями описується плоскопаралельний рух? Їх тлумачення.
3. Як визначаються швидкості точок тіла у його плоскопаралельному русі? Довести.
4. Як визначаються прискорення точок тіла у його плоскопаралельному русі? Довести.
5. Яка точка називається миттьовим центром швидкостей плоскої фігури?
6. Як визначається положення миттьового центра швидкостей, якщо напрямки векторів швидкостей двох точок тіла відомі? У випадку, якщо вони паралельні?
7. Сформулювати та довести теорему про проекції швидкостей двох точок тіла у його плоскопаралельному русі.
8. Що називається миттьовим центром прискорень плоскої фігури? Як він визначається?
Лекція № 14
Тема: “Складний рух точки”
|
|
|
|
|
Дата добавления: 2014-10-23; Просмотров: 870; Нарушение авторских прав?; Мы поможем в написании вашей работы!