КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Промислова техніка
|
|
|
|
- регулювання температури хімічних процесів;
- регулювання хлібопекарських печей;
- регулювання натягу нитки у намотувальних і прядильних машинах;
- регулювання натягу стрічки у пакувальних машинах;
- керування промисловими роботами;
- регулювання ліфтів, тощо.
Як видно з наведеного, далеко неповного переліку, сюди входять процеси, математичні моделі яких важко отримати, або ж вони змінюються під час роботи в залежності від багатьох факторів. В результаті вказаних причин застосування традиційних регуляторів стає проблематичним або й взагалі неможливим.
Будова FL -регулятора
Обробка інформації FL - регулятором із застосування лінгвістичних понять та формування керуючих сигналів відбувається трьома кроками (рис. 13.6):
1. фаззифікація;
2. опрацювання лінгівістичних правил;
3. дефаззифікація.
Як уже вказувалося, під фаззифікацією розуміють мовну інтерпретацію технічних величин лінгвістичними змінними і лінгвістичними термами (значення лінгвістичних змінних - нечіткі множини). Якщо, наприклад, вимірювальний перетворювач показує температуру  (чітка величина), то ця вхідна величина у FL інтерпретується лінгвістичною змінною “Температура” за допомогою лінгвістичних термів, наприклад, “гарячий” і/або “нормальний”, і/або “високий”. Зокрема, можна вважати, що температура становить 30% високої і 70% нормальної. Лінгвістичні поняття користувач може визначати довільно.
(чітка величина), то ця вхідна величина у FL інтерпретується лінгвістичною змінною “Температура” за допомогою лінгвістичних термів, наприклад, “гарячий” і/або “нормальний”, і/або “високий”. Зокрема, можна вважати, що температура становить 30% високої і 70% нормальної. Лінгвістичні поняття користувач може визначати довільно.
Inferenz утворює похідні вербально описних регулюючих величин через “якщо/ тоді” – правила. В результаті отримуються нечіткі множини.
Зворотне перетворення словесно описаних технічних величин здійснюється у процесі дефаззифікації. Нечіткі множини знову перетворюються в чіткі величини. Наприклад, вислів “вентиль трохи прикрити” перетворюється у чітку регулюючу величину (наприклад, теплове навантаження 25Вт).
|
|
|
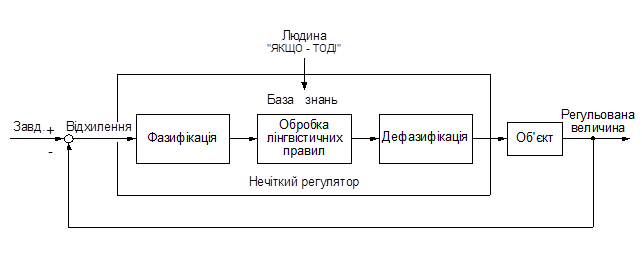 Рис. 13.6. Структура регулятора з нечіткою логікою.
Рис. 13.6. Структура регулятора з нечіткою логікою.
Головні критерії застосування FL- регулятора:
- застосування, коли звичайний регулятор не забезпечує задовільного результату;
- процеси з суперечливими цілями регулювання;
- процеси з нелінійною поведінкою;
- велике запізнення в ході процесів (приклад - змінна продуктивність,
витримки в процесі обробки);
- процеси з багатьма регульованими величинами;
- наближення процесів регулювання до людського способу дії.
Переваги FL- регулятора
- простий підхід до постановки проблем регулювання на основі людського уявлення і словесного формулювання;
- імплементація знань з досвіду;
- прозорість для змін та обслуговування;простіше проектування регулятора, короткий час розробки і відповідно менші затрати;
- концепція базується на правилах, математична модель об’єкта не є необхідною;
- нечіткий регулятор є робастним;
- широкий спектр застосування в галузі регулювання та керування.
За допомогою Fuzzy -регулятора, що базується на правилах регулювання, можна реалізувати майже нескінченно багато способів його поведінки, в залежності від числа застосованих Fuzzy -сетсів і в залежності від переміщення їх центрів ваги. Тим самим Fuzzy -регулятор значно гнучкіший ніж ще такий “комфортабельний” стандартний регулятор, що базується на алгоритмі. Тому варто застосовувати Fuzzy -регулятор не лише для надзвичайно складних і, так би мовити, “неописуваних” об’єктів регулювання. Сьогодні у промисловості Fuzzy -регулятори використовуються також і там, де працюють звичайні “оптимальні” ПІД-регулятори.
13.3. Приклади систем керування з нечіткою логікою
Винайдена у США, ця іноваційна технологія була швидко підхоплена в Японії і застосована у техніці автоматизації. Вона доповнює класичну техніку регулювання. У японському метро м. Sendai таке керування рухом потягів було застосоване вже у 1987р, що забезпечило вищу точність їх зупинки, плавність розгону і зупинки, комфортабельність руху та економію електроенергії.
|
|
|
Fuzzy імплементується на спеціальних Fuzzy - процесорах.
Особливості функціонування систем керування з нечіткою логікою розглянемо на досить типових прикладах.
Приклад 1:
Регулювання підйомного крану за допомогою FL – регулятора
Скрізь там, де крани мають рухомі візки, існують проблеми коливань вантажу при процесах позиціювання. Fuzzy -розв’язок проблеми ґрунтується на розділеннні процесу транспортування на різні фази.
Протягом фази підвезеення, тобто при прискоренні крана і вантажу, потрібно знайти певний компроміс між допустимим прискоренням і уникненням екстремально сильного коливного руху вантажу. Відповідно керування приводом при цьому справді сильно залежить від маси рухомого вантажу. При нормальному русі задача полягає в тому, щоб реалізувати по можливості швидке пересування у напрямку мети позиціювання. При цьому за допомогою регулятора може обмежуватися лише “великий” кут відхилення. Така компенсація кута відхилення може досягатися завдяки зменшенню прискорення рухомого візка.
У фазі позиціювання приводом потрібно керувати так, щоб досягалася висока точність позиціювання. Однак, при під’їзді позиціонування повинне виконуватися по можливості без коливань. Отже, регулятор повинен, в залежності від вантажу та існуючих коливань, забезпечувати момент вступу в фазу гальмування, а також відповідну криву гальмування. З метою швидкого транспортування повинні гаситися коливання лише при наближенні до мети.
Для реалізації концепції регулювання, як FL -системи, є необхідним компроміс між швидкістю і кутом коливань, як часовими змінними параметрів процесу, а також математичною складністю проблеми.
Описана вище стратегія регулювання для гасіння коливань вантажу за допомогою FL – регулятора у матричному зображенні показана на рис. 13.7. Для трьох значень стану “далеко”, “близько” і “нуль” відповідно показані усі можливі комбінації вхідної змінної - кута відхилення вантажу з вихідною змінною – навантаженням двигуна. Тим самим визначається стратегія регулювання, яка, незважаючи на сильні коливання у фазі прискорення, забезпечує одночасно точне позиціювання і гасіння коливань за найкоротший час.
|
|
|
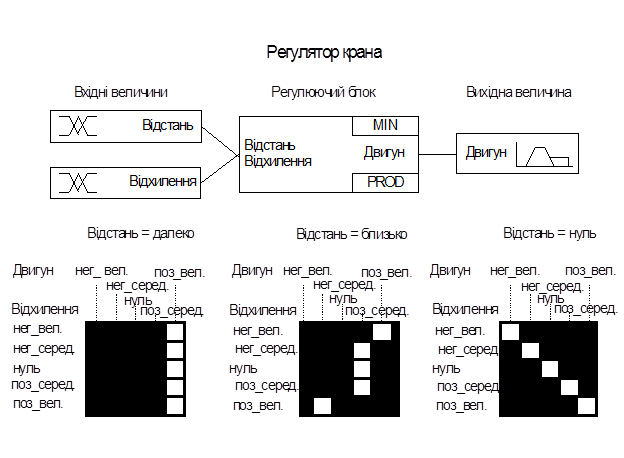
Рис. 13.7. Схема Fuzzi -Logic – регулятора і базові правила
у матричному зображенні.
|
|
|
|
|
Дата добавления: 2014-10-31; Просмотров: 421; Нарушение авторских прав?; Мы поможем в написании вашей работы!