КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Установленная мощность двигателей, кВт 0,8
|
|
|
|
Напряжение, В 380
Частота, Гц 50
Габаритные размеры машины, мм не более 1060 х 720 х 1550
Масса машины, кг не более 150
3.3. Система управления
Микропроцессорная система реализована на основе микроконтроллера 51-го семейства АТ89С52 фирмы Atmel, который содержит 8 кБ флэш-памяти, последовательный порт RS-232C, 4 параллельных 8-битных порта.
Система управления включает в себя память программ объемом 64 кБайт, память данных 32 кБайт с подпиткой от встроенной батарейки, интерфейс для ввода информации с клавиатуры, схему сопряжения с ЖКИ-дисплеем типа DV-16120, схему управления шаговыми двигателями типа ДШИ-200-3 для привода нижнего колеса и верхнего ролика.
Схема управления ШД состоит из коммутатора, формирующего 4-х фазную последовательность импульсов для коммутации 4-х фаз шагового двигателя и схемы дробления основного шага двигателя на 4 для повышения максимальной частоты приемистости ШД. Электрическое дробление шага осуществляется с помощью счетчика импульсов и микросхемы ПЗУ с зашитой в нее кодами sin и cos. Выходные логические сигналы коммутаторов А, В, Б, Г и ступенчатые квазисинусоидальные сигналы sin, cos поступают на силовые микросхемы управления ШД типа SLA 7026 M, каждая из которых обеспечивает коммутацию 4-х фаз с током коммутации до 1,5 А, изменяющимся по закону sin и cos. Выходы этих микросхем непосредственно подключаются к соответствующим обмоткам ШД.
Для синхронизации перемещения приводов верхнего ролика и нижнего колеса с главным валом швейной головки служит датчик положения иглы, представляющий собой оптронную пару, формирующую импульс при каждом ходе иглы.
С помощью пульта управления задаются режимы работы швейной машины, а на ЖКИ-индикатор выводится цифровая информация: суммарное количество стежков, количество стежков на одну сторону, длина стежка в мм, наличие или отсутствие закрепки и т.д.
|
|
|
Питание системы управления производится от блока питания IBM со встроенным в него формирователем напряжения питания шаговых двигателей +30V.
3.4. Описание кинематической схемы швейной машины
В кинематической схеме швейной машины (рис. 3.2) можно выделить следующие механизмы и узлы: механизм иглы, механизм нитепритягивателя, механизм челнока, механизм транспортирования материала, механизм обрезки нитей, узел верхнего прижимного ролика, узел смазки, устройство для регулирования натяжения игольной нити, устройство для намотки нити на шпулю.
Механизм иглы. На главном валу I закреплен кривошип 2, на кривошипе крепится верхняя головка шатуна 3. Нижняя головка шатуна закреплена на поводке 5, соединенном с игловодителем 6. Для предотвращения осевого поворота игловодителя, на конце поводка свободно крепится ползун 4, располагающийся в вертикальном пазу. При повороте главного вала игловодитель 6 с иглой 7 совершает возвратно-поступательное прямолинейное движение в направляющих неподвижной рамки.
Механизм нитепритягивателя. На пальце кривошипа 2, закрепленного на главном валу 1, располагается нижняя головка шатуна 8. Верхняя головка шатуна соединена с коромыслом 9. Нитепритягиватель изготовлен заодно с шатуном и при повороте кривошипа 2 совершает перемещения по шатунной кривой обеспечивая необходимую подачу и выбирание игольной нити.

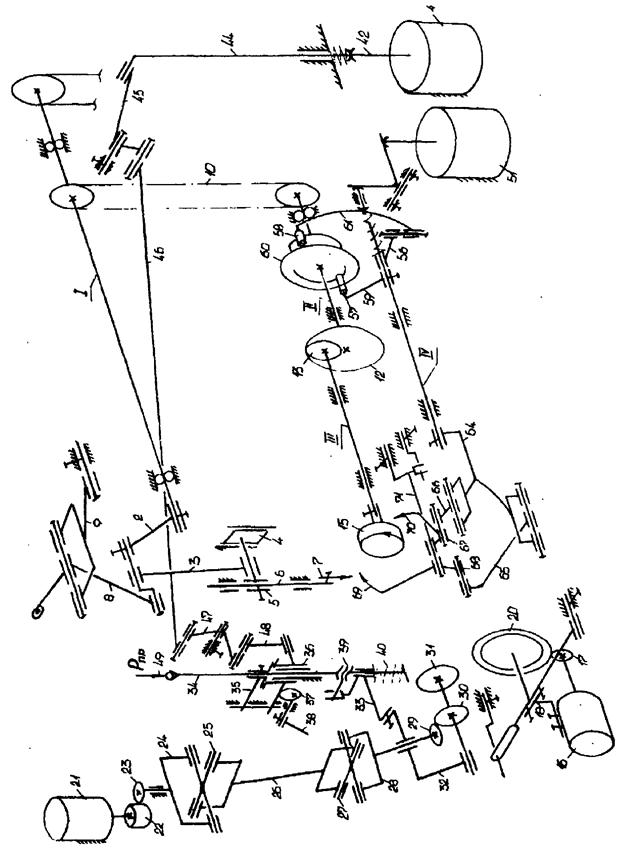
Механизм челнока. Посредством зубчатоременной передачи 10 (i=1)вращение от главного вала передается валу II, на котором закреплена зубчатая шестерня 12 с внутренним зубчатым венцом. С шестерней 12 входит в зацепление зубчатое колесо 13 закрепленное на челночном валу III Передаточное отношение пары i=1:2. Центральношпульный челнок 15 закреплен на валу Ш и совершает два оборота за один оборот главного вала.
|
|
|
Механизм обрезки. Ножи приводятся в движение с помощью кулачка с кинематическим замыканием толкателей. Кулачок 60 жестко крепится на валу II и вращается с частотой главного вала. Кулачок имеет два профиля. С одним осуществляется постоянный контакт ролика 57 толкателя 59. Второй толкатель состоит из двух составляющих 56 и 61 и входит в контакт с при срабатывании электромагнита 51. При набегании ролика 58 на профиль кулачка, вал IV получает качательное движение. На конце вала IV закреплено коромысло 64 соединенное с шатунами 65 и 66. Другие головки шатунов закреплены на рычагах 67 и 68, имеющих общую ось 71. Ножи 69 и 70 закреплены на рычагах 67 и 68.
Узел верхнего прижимного ролика. Прижим материала верхним роликом осуществляется с помощью пластинчатой пружины 49, которая своим концом опирается на стержень 34. Для облегчения заправки нити в иглу верхний ролик откидывается на стержне 34. Для этого кронштейн 33 необходимо вывести из контакта с осью 39. Контакт звеньев поддерживается пружиной 40. Ручной подъем верхнего ролика осуществляется поворотом флажка 38 с эксцентриком 37. Эксцентрик 37 поворачивается и поднимает нижний кронштейн 36, который, взаимодействуя с верхним кронштейном 35, закрепленным на стержне 34, поднимет верхний ролик.
Автоматический подъем осуществляется с помощью электромагнита 41, который своим штоком 42 перемещает тягу 44 и через систему звеньев 45, 46, 47, 48 поднимает нижний кронштейн 36 с верхним роликом 31.
Механизм транспортирования материала. Верхний прижимной ролик и нижнее транспортирующее колесо получают движение от различных источников.
Узел нижнего колеса. На роторе шагового двигателя 16, закрепленного на кронштейне 18, крепится шестерня 17. Шестерня 17 находится в зацеплении с зубьями колеса 20, являющимися также транспортирующими. Нижнее транспортирующее колесо 20 осуществляет перемещение материала по заданной программе.
Узел верхнего ролика. На роторе шагового двигателя 21, закрепленного на корпусе швейной машины, установлена шестерня 22. Шестерня 22 находится в зацеплении с зубчатым колесом 23, на валу которого находится вилка 24 шарнира 25. Другой шарнир 27 соединен с первым валиком 26. На валу вилки 28 закреплена коническая шестерня 29, находящаяся в зацеплении с зубчатым колесом 30 изготовленным как одно целое с верхним транспортирующим роликом 31. Ось верхнего ролика располагается в кронштейне 3, соединенном с кронштейном 33, закрепленного с возможностью поворота на стержне 34.
|
|
|
3.5. Контрольные вопросы
Назначение и технические характеристики швейной машины с МПУ.
Какие функции задаются с помощью пульта управления?
Поясните структуру системы управления.
Поясните конструкцию и принцип работы механизма транспортирования.
Поясните работу и устройство механизма иглы?
Как регулировать согласованность движения механизма транспортирования с движением иглы?
Поясните работу и устройство механизма обрезки ниток?
Поясните работу и устройство механизма челнока?
Поясните работу и устройство узла верхнего прижимного ролика?
Поясните работу и устройство механизма нитепритягивателя?
Как регулировать усилие прижатия материала к игольной пластине?
Как осуществляется перемещение сшиваемого материала?
3.6. Контрольные механизмы
Механизм нижнего транспортирующего колеса.
Механизм верхнего транспортирующего ролика.
Механизм обрезки.
Механизмы нитепритягивателя и иглы.
Механизм челнока.
3.7. Выполнение лабораторной работы
Изучить теоретическую часть методических указаний.
Ответить на контрольные вопросы.
Изучить контрольные механизмы.
Выполнить индивидуальные задания по указанию преподавателя.
3.8. Содержание отчета по лабораторной работе
Отчет по лабораторной работе должен содержать:
- назначение оборудования;
- технические характеристики;
- назначение основных механизмов;
- описание работы механизма и его схему выполненную на отдельном листе в соответствии с ГОСТ, согласно вариантам контрольных механизмов.
Задание преподавателя может включать анализ процесса взаимодействия исполнительных инструментов машины, составление кинематических, пневматических, гидравлических, электрических схем, а так же определение технологических, кинематических или динамических параметров работы машины.
Для защиты лабораторной работы студент должен предоставить отчет по лабораторной работе, выполненный в отдельной тетради для лабораторных работ, схему контрольного механизма и устно ответить на контрольные вопросы.
|
|
|
|
|
Дата добавления: 2014-11-20; Просмотров: 1051; Нарушение авторских прав?; Мы поможем в написании вашей работы!