КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Реализация встраиваемых систем управления электромеханическими объектами
|
|
|
|
Применительно к встраиваемым системам управления электромеханическими объектами, структуру, рассмотренную (см. рис.), содержащую электромеханическую и электронную (вычислительную) части и потому называемую электромеханотронной системой, можно представить более подробно
Пульт оператора включает в свой состав подсистему ввода и подсистему вывода. Подсистема ввода реализуется на дискретных (кнопки, переключатели и др.) и аналоговых (потенциометры) элементах, что позволяет удобно работать с различными вариантами представления вводимой информации: некоторые уставки (т. е. режимы и параметры функционирования, задаваемые системой более высокого иерархического уровня, в частности, оператором) следует выбирать из заданного множества (например, задавать один из нескольких режимов работы), некоторые— плавно регулировать (например, величину управляющего воздействия). Подсистема вывода, также исходя из удобства восприятия оператором информации, реализуется на различного рода индикаторах (сигнальные, мнемонические, шкальные, символьные и I рафические индикаторы). Простота восприятия обеспечивается мнемоническими индикаторами, разнообразие выводимой информации — многоразрядными символьными и графическими индикаторами.
с
Помимо собственно объекта управления исполнительного двигателя, в электромеханический блок входят датчики, измеряющие значения параметров функционирования системы. К ним относятся датчик частоты вращения и датчик углового положения объекта. Сигналы управления объектом и неко- торыми вариантами реализаций датчиков формируются микроконтроллерной системой и поступают на электромеханические элементы через усилители устройства сопряжения, которые позволяют сообщать управляющим сигналам необходимую мощность.
|
|
|
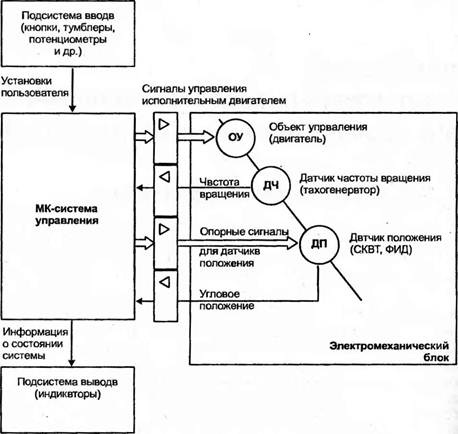
Рис. Функциональная схема электромеханотронной схемы
Сигналы с датчиков передаются на микроконтроллерную систему через устройства согласования, позволяющие нормализовать значения этих сигналов (усилить, ослабить, отфильтровать), а также защитить (например, методом ограничения сигнала) входные цепи микроконтроллерной системы от нештатных ситуаций, связанных с неправильной работой отдельных узлов электромеханотронной системы (например, если частота вращения ротора исполнительного двигателя в силу ошибки управления, обрыва или замыкания цепи возрастет в несколько раз, то пропорционально возросший сигнал датчика частоты вращения может выйти за границы предельно допустимых значений и электрически повредить цепи микроконтроллера).
|
|
|
|
|
Дата добавления: 2014-12-10; Просмотров: 475; Нарушение авторских прав?; Мы поможем в написании вашей работы!