КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Аналіз стійкості руху машин
|
|
|
|
Стійкість трактора та автомобіля
Лекція №6
Поперечна та поздовжня стійкість.
Стійкість проти перекидання і сповзання.
Аналіз стійкості машин проти перекидання і сповзання виконують, як правило, розв'язуванням окремих задачу визначають показники статичної
План:
1. Аналіз стійкості руху машин.
2. Стійкість проти перекидання і сповзання. Поперечна та поздовжня стійкість.
3. Стійкість автомобіля проти заносу.
4. Шляхи підвищення стійкості і керованості.
Стійкість руху машини характеризується здатністю переміщуватися без відхилення від заданої траєкторії.
Внаслідок втрати стійкості руху може виникнути перекидання машини сповзання зі схилу, занос, відхилення від заданого напрямку руху, коливання напрямних коліс тощо.
Збереження стійкості надзвичайно важливе, бо обумовлює безпечну і високопродуктивну роботу машин.
Проблема стійкості руху і рівноваги механічних систем відома в механіці вже більш як два століття. Основний вклад в її вирішення вніс знаменитий російський вчений А. М. Ляпунов.
Питання про стійкість руху машин виникає в зв’язку з тим, що поряд з основними зовнішніми силами. які діють на машину (що входять у рівняння тягового балансу або диференційне рівняння руху), завжди існують випадкові силові дії, які виводять її з основного (теоретичного заданого) руху. Ці сили не входять у диференційні рівняння руху машини. Вони виникають при певних умовах взаємодії ходової системи з поверхнею руху (нерівності шляху, неоднакові реакції на праві і ліві колеса та сили їх зчеплення, різні нормальні реакції, обумовлені уклоном), а також внаслідок інерційних і аеродинамічних явищ. Деякі з цих факторів можуть викликати коливання напрямних, коліс, які впливають на траєкторію руху машини
|
|
|
Випадкові сили надають трактору або автомобілю додаткових лінійних або кутових зміщень від основного руху.
Після одержання механічною системою малих початкових відхилень від основного руху (збурень) виникає питання про характер подальшої їх зміни за часом.
Можливі три випадки:
збурення з бігом часу зменшуються, асимптотично наближаються до нуля і зникають, система повертається до основного руху (асимптотично стійкий рух);
збурення з бігом часу не зникають, але залишаються малими (неасимптотично стійкий рух);
 (4.15.)
(4.15.)
де rК — динамічний радіус ведучих коліс автомобіля, м;
іKZ — передатне число коробки зміни швидкостей на прямій передачі (іKZ=1)
 (4.16.)
(4.16.)
де λш — коефіцієнт деформації шини, який для вантажних автомобілів приймається 0,93-0,95;
r0 — радіус шини у вільному стані, м.
 (4.17.)
(4.17.)
де d, в — відповідно діаметр ободу колеса і ширина профілю шини в дюймах.
Далі визначається передатне число ік1 першого ступеня коробки передач.
Передатне число першої передачі повинно задовольняти наступні вимоги:
забезпечувати подолання підвищених дорожніх опорів руху;
не викликати буксування ведучих коліс автомобіля під час передачі максимального крутного моменту двигуна;
забезпечувати максимальне значений динамічного фактора автомобіля;
Вказані вимоги виконується за умови:
 (4. 18.)
(4. 18.)
де φ — коефіцієнт зчеплення ведучих коліс з опорною поверхнею, який приймається в межах 0,5-0,7;
λк — коефіцієнт навантаження ведучих коліс (λк =0,70-0,75);
Мдтах — максимальний крутний момент двигуна, Н×м.
Щоб визначити передатне число коробки передач на інших ступенях, необхідно перш за все вибрати число ступенів. Для вантажних автомобілів, що працюють в умовах сільського господарства, їх повинно бути не менш чотирьох – п’яти. Структуру ряду передач вибирають з умови забезпечення
|
|
|
 найбільшої інтенсивності розгону. Для досягнення вказаної мети розгін на кожній передачі повинен розпочинатися на однакових частотах n1 обертання вала двигуна, а закінчуватися на постійних частотах n2. Крім цього, швидкість початку розгону на даній передачі повинна дорівнювати швидкості кінця розгону на попередній передачі і саме тому вона повинна виконуватись умова
найбільшої інтенсивності розгону. Для досягнення вказаної мети розгін на кожній передачі повинен розпочинатися на однакових частотах n1 обертання вала двигуна, а закінчуватися на постійних частотах n2. Крім цього, швидкість початку розгону на даній передачі повинна дорівнювати швидкості кінця розгону на попередній передачі і саме тому вона повинна виконуватись умова
 (4.19)
(4.19)
де ік (x – 1), ікx – передатне число коробки на попередній та наступній передачах.
Вказана умова передбачає побудову ряду передач за принципом геометричної прогресії, знаменник якої дорівнює
 (4.20.)
(4.20.)
де Z — число передач;
іК1 — передатне число першої передачі
іКZ — передатне число прямої (найвищої) передачі.
Знаючи передатне число першої передачі і знаменник геометричної прогресії, визначають передатні числа всіх передач.
Розгін автомобіля, якщо застосовується геометричний ряд передач, ілюструється графіком / 4.3 /. На графіку, що відображає швидкісну характеристику автомобільного двигуна, поряд з ефективною потужності
Ne = f (nд) побудовано ряд променів, що характеризують залежність швидкості автомобіля V від частоти обертання
русі, бо опорні котки притискаються до гребенів гусениць і зростає тертя, а також відбувається нагрібання ґрунту, який засипає внутрішні поверхні гусениць, утруднюючи кочення опорних котків);
Рт — тягове зусилля, яке при повороті діє під кутом у до поздовжньої осі симетрії машини, в результаті чого утворюється бокова складова PTsin у, що істотно впливає на динаміку повороту;
Мс— момент опору повороту гусениць, обумовлений їх тертям по ґрунту і його деформуванням при обертанні навколо полюсів О2 і О1 які, як і центр повороту О, у загальному випадку зміщені на відстань Хп від середини;
Рп і Р' — відцентрова сила і її бокова складова;
М, — момент сил інерції, що діє під час входу у поворот;
Z2 і Z1 — бокові реакції ґрунту, які діють на гусениці при повороті.
Залежно від напрямку створюваного відносно точки От моменту ці сили повертають гусеничну машину або перешкоджають повороту.
Зокрема поворотний момент Мп можна подати так:
Мп = 0,5В(Рк2- Рк1). (5.8.)
|
|
|
Можливість повороту гусеничного трактора при умові достатнього зчеплення характеризується нерівністю:
Рк2 < 0,5<φG.
Аналіз динаміки повороту поїздів і їх стійкості наведено у спеціальній літературі.
Рс =  (5.7.)
(5.7.)
Вважається, що поворот за умовами зчеплення відбудеться, тобто керованість збережеться, якщо
Рс<φΥп
Втрата керованості можлива не тільки при малому коефіцієнті зчеплення, але й при значному зменшенні нормальних реакцій грунту на передні напрямні колеса Уп під час руху по підйому або внаслідок несприятливої силової дії з'єднаної з трактором машини.
Стандартом установлено, що навантаження на передні колеса при мінімальних допустимих кутах підйому і тягових зусиллях повинні бути не менше 0,2 експлуатаційної ваги.
На гусеничну машину при повороті діють такі зовнішні сили (рис. 5.11.):
Рк2 і Рк1 — дотичні сили тяги, що діють відповідно на забігаючу і відстаючу гусениці (вони бувають різні за значенням і напрямками, бо за допомогою механізмів повороту гусениці можуть частково або повністю відключатися від двигуна, гальмуватися або до них можуть підводитися різні крутні моменти);

5.11. Схема сил, які діють на гусеничний
трактор при повороті
Pf2 і Pf1 — сили опору коченню (вони більші, ніж при прямолінійному
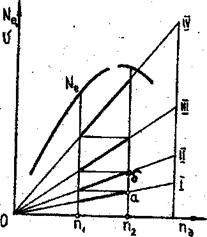
Рис. 4.3. Графік руху автомобіля під час розгону, якщо застосовується геометричний ряд передач / I, II, III і IV – номери передач /.
вала двигуна на різних передачах. Точки перетину кожної пари суміжних променів з вертикалями котрі проходять через точки n1 та n2, лежать на прямих, паралельних до осі абсцис, оскільки в точках переходу з однієї передачі на іншу швидкості автомобіля повинні бути однаковими. Відрізки промкнів, на яких проходить розгін автомобіля, виділені контурними лініями. Спочатку автомобіль рухається на першій передачі, в точці а він переходить на другу передачу, в точці б – на третю і т.п.
На процес розгону впливає багато випадкових факторі в, тому оптимізація даного процесу може бути досягнута тільки за умови його часткової або повної автоматизації.
|
|
|
|
|
|
|
|
Дата добавления: 2014-12-16; Просмотров: 1396; Нарушение авторских прав?; Мы поможем в написании вашей работы!